打印控制器及打印方法与流程
1.本发明涉及一种打印设备,该打印设备包括安装在可移动支承件上的可移动机械臂以及支承在机械臂打印端的打印头。
2.本发明还涉及一种用支承在可移动机械臂上的打印头打印物体、尤其是大型三维轮廓的物体的方法。
背景技术:
3.us 2016/0355026描述了一种用于在飞行器的机身或机翼上打印的大型机器人系统。机械臂在飞行器复杂的几何形状上以不同强度的重叠条带移动打印头,该打印头可构造成喷墨打印机。
4.在wo2016/066208中,喷墨打印机被描述为具有与可移动打印头的喷嘴流体连通的主油墨盒,该可移动打印头位于滑动托架单元上。连接于主油墨盒的泵由控制器控制,以便通过油墨输送线路从主油墨盒向打印头供应油墨。通过结合托架单元沿横向扫描方向的相对运动和打印介质在介质前进方向上的进料,每个打印头可以在打印介质上的各个像素位置上沉积油墨。将压力传感器联接到主油墨盒以确定每个储罐的填充水平。当主油墨盒中的压力传感器观察到的压力型式下降到预定阈值以下时,控制器激活副油墨盒以向主油墨盒供应额外的油墨而进行再填充。
5.已知的喷墨打印机不适于在复杂的三维打印表面上进行打印。这对于在改变打印头的定向时以相对较高的分辨率和速度(每英寸200点和250 mm/s)进行的打印尤其如此。这种条件需要对打印条件的精确控制。
6.因此,本发明的目的在于提供一种喷墨打印机及打印方法,该喷墨打印机和打印方法尤其适用于在复杂的三维打印表面上精确且快速地打印。
技术实现要素:
7.在此,根据本发明的打印设备包括:
8.‑
可移动机械臂,该可移动机械臂安装在可移动支承件上,
9.‑
打印头,该打印头支承在机械臂的打印端上,该打印头包括多个喷嘴,
10.‑
油墨贮存部,该油墨贮存部连接至打印头的喷嘴并连接至泵装置,用于从贮存部向喷嘴供应油墨,以及
11.‑
控制器,该控制器用于在改变打印头的定向时沿打印轨迹移动打印头,其中控制器布置成:
12.在校准步骤中,沿校准轨迹移动打印头,测量打印头中的油墨压力,并且生成和储存打印头的不同定向上喷嘴的油墨压力控制数据,以及
13.在打印步骤中,基于所储存的油墨压力控制数据生成打印头沿打印轨迹在不同定向上的压力控制信号,该压力控制信号被供应到泵装置,使得喷嘴中的油墨的压力设定为预定压力值。
14.在校准步骤中,当打印头在应用打印测试型式时,在给定的打印速度下沿校准轨迹以不同的定向移动时,测量打印头中的压力。以这种方式,为了沿打印轨迹将遇到的主要打印头的定向的最佳打印型式下的压力,记录打印头压力并导出压力数据,该压力数据比如是压力曲线的公式或查找表。
15.限定打印头的打印轨迹的打印表面可以由例如车辆的、特别是飞机的三维轮廓表面形成,该三维轮廓表面比如是机身或机翼部分。校准轨迹可以不同于打印轨迹并且可以包括所有主要的打印头的定向或者可以部分地或全部地与打印轨迹重叠或重合。
16.在校准步骤中,不同的打印头的定向可以由压力控制曲线的参数计算。替代地,可以确定压力控制值并将其储存在控制器的存储单元中。校准轨迹可以包括所有主要的打印头的定向,或者该校准轨迹可以对应于打印轨迹。压力控制数据因所使用的油墨类型而改变,并取决于油墨密度、油墨粘度和其他流变特性。
17.在打印步骤期间,基于与沿打印轨迹的打印头的位置和定向相匹配的压力控制信号对泵装置进行控制,使得泵装置以一定压力向打印头喷嘴供应油墨,使得在喷嘴的入流开口的油墨处于所控制的打印压力下,该压力可以是大致均匀的压力。以这种方式,可以实现在超过1000分辨率(dpi) 的高打印分辨率下的用于复杂几何形状的可重复且精确的高速打印过程 (250毫米/秒或更高)。
18.在根据本发明的打印设备的一个实施例中,打印头包括用于测量喷嘴处的油墨压力的压力传感器。
19.提供集成在打印头中的压力传感器,当使用新的打印轨迹或者当诸如油墨类型或打印速度的打印设置改变时,可以轻松地允许校准步骤的执行。对于大型打印表面,打印头中的压力传感器允许在打印过程中执行校准步骤。通过在打印头上安装压力传感器,打印头的速度和加速度对打印压力的影响由传感器测量并自动校正。
20.压力传感器可包括连接到喷嘴的入流端的入流压力传感器,用于测量喷嘴处的入流油墨压力。控制器可以构造成使得泵装置在入流压力下将油墨供应到喷嘴并且是通过由pi=(a+k1)*f(θ)+(b+k2)*g(θ)形成的入流压力控制信号来操作的,其中f(θ)和g(θ)是取决于打印头与水平方向的角度θ的几何因子,a是在垂直于打印表面的方向上从压力传感器到打印表面的距离,b则是压力传感器在打印表面的平面内的距离,以及k1和k2是基于所使用的油墨和流体软管的特性确定的常数。
21.打印头的每个喷嘴都是一个开口,油墨在此处与大气接触。如果打印头中的油墨处在过高的压力下,则油墨会耗尽。相反,如果油墨处在过低的压力下,则打印头将失去其主要功能,并且空气将被抽吸入喷嘴。在使用重力进料设置的打印系统中,正压仅由重力生成,并且泵用于抽真空,以便将打印头的喷射部中的油墨压力正确地控制在环境大气压力下。
22.在另一实施例中,压力传感器包括连接到打印头出口的再循环压力传感器,该打印头出口位于喷嘴阵列的与入流侧相对的一侧。泵装置以再循环压力从打印头出口排出油墨,并且该泵装置是通过由 pr=(a+k3)*f(θ)+(b+k4)*g(θ)+x形成的再循环压力控制信号pr来操作的。在该方程中,k3和k4为常数,x则是流入压力和有压力传感器测量的再循环压力之间的差值。再循环打印头的优点是经过喷嘴的油墨的一致流,该一致流在喷射后重新供应至喷嘴。油墨的连续流动还可以防止油墨在喷嘴中变干,油墨在喷嘴中变干可能会引
起故障。
23.泵的速度由方程控制,比如前面提到的pr方程;该方程假设于重力供墨系统,但可以在机械地生成正油墨压力的系统中进行调整和使用。诸如油墨化学、管道材料和管道路线之类的系统特性,以及打印头相对于泵的动态位置这两项,该方程都考虑了。
附图说明
24.将参考附图通过非限制性示例的方式详细描述根据本发明的打印设备以及打印的方法的一些实施例。在附图中:
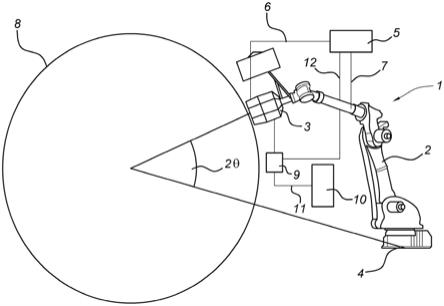
25.图1示出了根据本发明的打印设备的示意性概览,并且
26.图2示出了本发明的打印头和压力控制单元的示意性布局。
具体实施方式
27.图1示意性地示出了根据本发明的打印设备1,该打印设备1具有支承打印头3的机械臂2。打印头3可包括零件号为sg1024la
‑
2c的fujifilm (富士胶片)dimatix类型的喷墨打印机。机械臂放置在可移动支承件4 上,例如2018年6月22日提交的美国专利申请第16/015240号和第 16/015243号中描述的类型。油墨经由泵9和油墨管道11从散装油墨贮存部10供应至打印头3。
28.控制器5带有连接于打印头3中的压力传感器的打印控制线6,该压力传感器用于测量打印头中喷嘴处的油墨压力。控制器5带有连接于泵9 的油墨供应控制线12,该泵9用于控制油墨向打印头3的供应。油墨供应系统的泵9可包括例如可从英国北安普郡megnajet公司获得的lc
‑
lfr类型的低流量再循环供应系统。
29.控制器5经由连接于机械臂2的控制线7来控制机械臂2的位置以及打印头3沿轮廓三维打印表面8的速度和定向,该轮廓三维打印表面8已通过示例示出为圆形,但在实际中将具有复杂的几何形状,比如飞机的外表面。
30.控制器5可由多个专用且空间分布的控制单元组成,比如弯液面压力控制单元21、再循环压力控制单元22和控制模块25,如图2所示,用于机械臂2的控制、打印头操作和油墨供应。
31.图2示出了具有喷嘴阵列16的打印头3的示意性概述,该喷嘴阵列具有连接于弯液面压力传感器13的入口12。喷嘴阵列16的出口14连接于再循环压力传感器15。阵列16中的每个喷嘴都配备有压电元件17,用于将沿着喷嘴流动的油墨18以小液滴的形式从喷嘴排出。
32.油墨从油墨贮存部19以弯液面压力pi流入喷嘴阵列16的入口12,并沿所有喷嘴输送,以向每个喷嘴填充油墨。油墨通过填充泵9从散装油墨贮存部10供应至油墨贮存部19。填充泵9由弯液面压力控制单元21控制。
33.在喷嘴阵列16的出口14处,沿着喷嘴的填充孔流动的油墨的再循环压力比弯液面压力小50毫巴(mbar)的设定压力差,从而油墨通过再循环压力控制单元22从出口14流回至油墨储存部19。再循环压力控制单元22 包括再循环泵23,该再循环泵23控制在如下所述的再循环压力pr下。
34.为了在喷嘴阵列16的入口12处以限定的弯液面压力pi操作喷嘴阵列 16,并且在
喷嘴阵列16的出口14处以限定的再循环压力pr操作喷嘴阵列 16,填充泵9由在控制器单元25中生成的压力曲线控制。压力曲线是基于打印头3的位置数据和这些位置的主要压力来生成的,在校准步骤中,打印头3由机械臂2沿着校准打印轨迹以所需的速度移动。在校准步骤期间,打印工业标准梯度型式并进行测量,从而为了所使用的所有类型的油墨在打印头3所有定向上的一致的打印型式而调整弯液面压力pi和再循环压力 pr。
35.校准步骤的结果是对于将在打印步骤中使用的任何类型的油墨的任何可能的打印头定向的弯液面压力pi和再循环压力pr的压力曲线。因为打印头3在打印时处于运动中,所以在打印之前以及可能在打印期间打印头会感觉到加速度。由于压力传感器的位置,入口压力pi和再循环压力pr 的压力方程不依赖于这些速度和加速度。如果打印头3感觉到加速度,压力传感器将检测到油墨中的较高或较低的压力。这种压力变化将反馈到入口泵和再循环泵,该入口泵和该再循环泵将改变它们的速度,以使油墨回到指令压力pi和pr。
36.控制入口压力pi和再循环压力pr的曲线定义为:
37.pi=(a+k1)*c*d*sin(90
°‑
θ)+(b+k2)*c*d*cos(90
°‑
θ)
38.pr=(a+k3)*c*d**sin(90
°‑
θ)+(b+k4)*c*d*cos(90
°‑
θ)
‑
x
39.本文中:
40.a:在垂直于打印表面8的方向上从打印头3中的压力传感器13、15 到打印表面8的距离,单位为英寸(inch)。
41.b:在平行于打印表面的方向上从打印头3中的压力传感器13、15到打印表面8的距离,单位为英寸(inch)。
42.c:从英寸水柱(inches of water)到毫巴(mbar)的换算系数。
43.d:油墨密度,单位为克/立方厘米(g/cm3)。
44.θ:打印头角度。
45.k1、k2、k3、k4:为所使用的每种特定油墨以及油墨管道属性设定的常数。这些常数考虑了油墨粘度的差异、油墨管道弯曲造成的压力损失以及管道摩擦造成的压力损失。
46.x:入口压力pi和再循环压力pr之间的设定差值,单位为毫巴(mabr)。
47.pi和pr的值是代表真空值的正数,即低于环境大气压力的量级。得出值a和值b的打印头的定向可以在控制器5中通过读取机械臂7的位置并由此导出打印表面8的定向来计算。打印头3的定向也可以通过直接读取控制器5、打印头3上的惯性测量单元(imu)的重力矢量或安装在打印表面8附近的其他传感器的重力矢量来推导。打印头角度θ的测量速率以及由此计算出的压力设定值pi和pr的更新速率应优选地至少等于20khz。
48.压力曲线pi和pr的示例如下:
49.‑
a=3.00英寸
50.‑
b=2.25英寸
51.‑
c=0.402毫巴/英寸
‑
水柱
52.‑
d=0.800克/立方厘米
53.‑
θ=80.0度(即打印头将朝墙打印,但略向下指向地板)
54.‑
k1=0.250英寸
55.‑
k2=
‑
0.250英寸
56.‑
k3=
‑
0.500英寸
57.‑
k4=0.500英寸
58.‑
x=50毫巴
59.pi=(3.00+0.250)*0.402*0.800*sin(90
°‑
80.0
°
)+(2.25+
‑
0.250)*0.402*0.800 *cos(90
°‑
80.0
°
)=5.04毫巴
60.pr=(3.00+
‑
0.500)*0.402*0.800*sin(90
°‑
80.0
°
)+(2.25+0.500)*0.402*0.800 *cos(90
°‑
80.0
°
)
‑
50=50.3毫巴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1