一种适用于绘图仪的高鲁棒性扫描系统的制作方法
1.本实用新型属于绘图仪技术应用领域,具体涉及一种适用于绘图仪的高鲁棒性扫描系统。
背景技术:
2.绘图仪是一种海图远程保障装置的打印输出单元,多用于海上计算机的输出设备,常见的形式为喷墨打印方式,可用于绘制各种海洋测绘图、建筑设计图、布线图与照片影像等,实现从岸基保障系统实时获取海图数据,即时打印输出纸质海图功能。随着绘图仪逐渐用于地形图、航空图、海岸图和高精度影像资料的输出,对绘图仪的打印稳定性要求越来越高,一般的绘图仪难以满足此类应用的精度要求。
3.而绘图仪的输出稳定性和输出精度主要由扫描系统、喷头自身与走纸结构的稳定性和精度决定。喷头由扫描系统的墨车带动做横向往复扫描运动,纸张在走纸机构中做纵向步进运动,纸张步进一个喷头距离后停止,喷头往复扫描打印一次,扫描打印完成后纸张再步进一个喷头距离,由此可实现纸张全覆盖打印。其中,扫描系统是绘图仪最为重要的运动系统,其运行的鲁棒性直接影响着绘图仪打印质量的高低。
4.墨车在加速、减速和匀速运动过程中,由于传送皮带的松紧或运动过程中摩擦力等因素,墨车速度不能完全按照电机编码器的驱动控制要求进行启动-加速-匀速-减速-停止的周期运动,存在万分之3的波动误差。墨车喷墨位置是由墨车水平速度与喷头直喷速度叠加所决定的,上述波动误差会导致喷墨打印时墨点位置发生极小的偏移,影响绘图仪打印的稳定性和精度。
技术实现要素:
5.本实用新型的目的在于克服现有技术的不足之处,提供一种提高扫描稳定性和精度的适用于绘图仪的高鲁棒性扫描系统。
6.本实用新型的目的通过如下技术方案来实现:
7.一种适用于绘图仪的高鲁棒性扫描系统,其特征在于:包括支撑横梁、墨车、扫描电机、传动机构、光栅检测组件、原点传感器、纸宽传感器、左撞纸传感器和右撞纸传感器;
8.所述支撑横梁的右端为扫描运动原点端,所述原点传感器安装在支撑横梁的原点端,其用于检测墨车运动的原点位置;
9.所述墨车通过直线导轨可往复移动式安装在支撑横梁上;墨车包括车体,在车体上安装有行走及喷墨控制系统,在车体的下端安装有喷墨头;
10.所述扫描电机采用内制有编码器的伺服电机,扫描电机安装在支撑横梁的左端,在扫描电机的输出端安装有主动同步带轮,在支撑横梁的右端通过轮架安装有从动同步带轮,主动同步带轮和从动同步带轮通过同步带连接,所述同步带的上行程段的局部位置与车体固定连接;所述主动同步带轮、从动同步带轮及同步带构成所述传动机构;
11.所述光栅检测组件用于检测墨车的实际移动位置,其包括光栅尺及光栅读头,所
述光栅尺通过光栅底座平行安装于支撑横梁上,所述光栅读头安装于车体上;
12.所述纸宽传感器安装在车体上,用于检测纸张的左右两边沿位置;
13.所述左撞纸传感器和右撞纸传感器分别安装在车体的左侧和右侧,其中,左撞纸传感器用于在墨车由右向左移动的过程中,检测纸张的异样状态;右撞纸传感器用于在墨车由左向右移动的过程中,检测纸张的异样状态;
14.所述行走及喷墨控制系统,用于接收原点传感器的检测信号,并根据该检测信号给扫描电机发出控制指令,控制墨车往复运动的原点起始位置;用于接收电机编码器的输出信号及光栅检测组件的输出信号,将该两信号进行处理后,再进行差值运算,根据运算结果对墨车运动进行补偿;用于接收左撞纸传感器和右撞纸传感器的检测信,根据两检测信号给扫描电机发出故障停机控制;用于接收纸宽传感器信号,计算获得纸张宽度,并结合原点传感器检测信号,确定扫描位置。
15.进一步的:原点传感器采用槽型光电传感器(npn型);纸宽传感器采用反射型光电传感器(npn型);左撞纸传感器和右撞纸传感器均采用槽型光电传感器(npn型)。
16.本实用新型具有的优点和积极效果为:
17.1、本扫描系统通过光栅检测组件可实时测得墨车的实际位置,通过电机内的编码器可实时测的墨车的设定运行位置,通过对该两个信号的比对,获得反向补偿脉冲信号,从而可实现对电机的转速、位置双闭环控制,减小了墨车启动-加速-匀速-减速-停止的周期运动波动误差,进而提高了扫描运动控制的鲁棒性和精度。
18.2、本扫描系统为防止卷筒纸安装歪斜导致出现打印歪斜现象,在墨车上设置有纸宽传感器,可以检测打印平台区域的纸边位置,配合光栅尺实现纸边相对位置的记录。纸张安装时,先检测一次纸张边缘位置并记录,纸张步进300mm后,再次检测纸张位置,若两次检测差值小于0.6mm,则安装合格,否则会提示纸张歪斜,重新安装。
19.3、本扫描系统设置有左撞纸传感器和右撞纸传感器,保证了墨车在往复运动的过程中,在纸张存在鼓包等缺陷的情况下,可控制墨车及时停车,从而可避免在有缺陷的纸张上打印出图纸,从而保证了图纸的打印质量。
附图说明
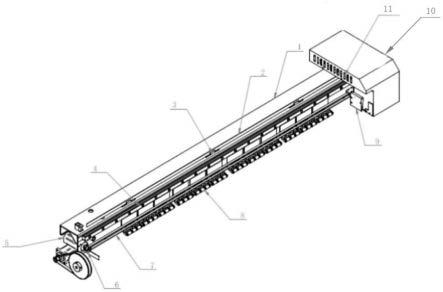
20.图1是本实用新型高鲁棒性扫描系统的结构示意图;
21.图2是本实用新型高鲁棒性扫描系统的控制图。
具体实施方式
22.以下结合附图并通过实施例对本实用新型的结构作进一步说明。需要说明的是本实施例是叙述性的,而不是限定性的。
23.一种适用于绘图仪的高鲁棒性扫描系统,请参加图1-2,其发明点为:包括支撑横梁、墨车、扫描电机、传动机构、光栅检测组件、原点传感器、纸宽传感器、左撞纸传感器和右撞纸传感器。
24.所述高鲁棒性扫描系统结构如图1所示,支撑横梁1主要支撑整个扫描系统,使扫描系统与绘图仪连接起来,光栅尺2与光栅底座3组成光栅组件,安装在墨车车体上的光栅读头 (又称脉冲编码器)读取光栅尺,实时反馈墨车实际运行位置,当墨车到达指定位置
时,安装在墨车上的行走及喷墨控制系统驱动喷头喷射墨滴,完成打印动作。同时行走及喷墨控制系统负责纸宽检测、纸边检测、纸前沿检测。
25.打印纸张通过压纸轮8压紧,扫描系统在扫描电机5的驱动下,以及安装在电机输出端的主动同步带轮6、传送皮带7及从动同步带轮构成的传动机构的带动下,墨车10沿着固定在支撑横梁上的直线导轨(也称扫描导轨)4做横向往复运动。导轨滑块机构加工和装配工艺精密,同步带传动机构传动比准确、无滑差、传动平稳,同时设置左防撞纸传感器9和右防撞纸传感器,保证扫描系统的高鲁棒性。
26.所述高鲁棒性扫描系统的控制如图2所示,原点传感器(槽型光电传感器)将墨车原点到位信号反馈给行走及喷墨控制系统11的主控板,同时脉冲编码器借助光栅尺执行位置反馈功能,并发出同步反向补偿脉冲信号减小波动误差。主控板采用补偿反馈后的梯形加减速脉冲驱动控制扫描电机,扫描电机为x轴伺服电机,通过同步传送带带动墨车进行往复运动,伺服电机内部转速闭环,达到减小周期行进运动的波动误差,提高扫描系统精度和鲁棒性的效果。扫描系统中传感器除原点传感器确定墨车原点位置外,该控制系统还包括安装在墨车上的纸宽传感器(反射型光电传感器)和安装在墨车两侧的左撞纸传感器(槽型光电传感器) 和右撞纸传感器(槽型光电传感器),这些传感器提升扫描系统防撞纸能力,进一步提高该组件的鲁棒性能。
27.本适用于绘图仪的高鲁棒性扫描系统,为防止打印时出现歪斜现象,按照
±
0.1%线性度要求,因打印宽度为914mm,即要求打印平台、走纸轴等与扫描导轨平行度优于1.828mm,参照国内现有加工装配水平,将打印平台、走纸轴、扫描导轨等关键件平行度定为0.3mm,通过精密加工配合调整机构高精度装配满足要求,辅助走纸轴,承载轴、切纸刀导轨等非关键件按照平行度1mm,通过加工精密定位台保证装配精度。
28.本适用于绘图仪的高鲁棒性扫描系统中,墨车运动有效宽度为914mm,墨车运动最大速度为1m/s,最大加速度值为5m/s2,导轨直线度优于0.2mm/m。扫描组件直线运动选用高精度直线导轨滑块机构,通过精密加工及精密装配工艺,确保导轨直线度优于0.2mm/m,位置反馈选用300lpi光栅尺,通过4倍频处理,达到1200dpi分辨率。传动系统采用同步带与同步带轮,具有传动比准确、无滑差、传动平稳、噪音小等特点,墨车最大重量为2kg,最大加速度5m/s2,同步带轮直径20mm,则电机扭矩为0.1n
·
m,小于选型电机的0.3n
·
m,满足要求。
29.尽管为说明目的公开了本实用新型的实施例和附图,但是本领域的技术人员可以理解:在不脱离本实用新型及所附权利要求的精神范围内,各种替换、变化和修改都是可以的,因此,本实用新型的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1