立体物印刷装置的制作方法
1.本发明涉及一种立体物印刷装置。
背景技术:
2.已知有通过喷墨方式而在立体的工件的表面上实施印刷的立体物印刷装置。例如,在专利文献1中,公开了一种具有如下头的装置,所述头上组装有喷出紫外线固化型的油墨的喷嘴、和出射紫外线光的光出射部。
3.然而,在上述的现有技术中,存在有如下问题,即,对于具有曲面或凹凸等的工件而言,如果为了提高印刷品质而试图适当地设定喷嘴与工件之间的距离,则例如光出射部等装置的结构部件有时会与工件发生干涉。
4.专利文献1:日本特开2008-246855号公报
技术实现要素:
5.为了解决以上的课题,本发明所涉及的立体物印刷装置的一个方式为,一种立体物印刷装置,其具有:第一头,其具有被设置有喷出液体的喷嘴的第一喷嘴面;能量出射部,其具有出射使从所述第一头被喷出的液体固化的能量的出射面;移动机构,其使所述第一头以及所述能量出射部相对于立体的工件的相对位置发生变化,在所述立体物印刷装置中,所述移动机构具备:直动机构,其使所述第一头以及所述能量出射部相对于所述工件的相对位置沿着第一轴而发生变化;第一升降机构,其使所述第一喷嘴面沿着与所述第一轴交叉的第二轴而进行移动;第二升降机构,其使所述出射面沿着所述第二轴而进行移动。
附图说明
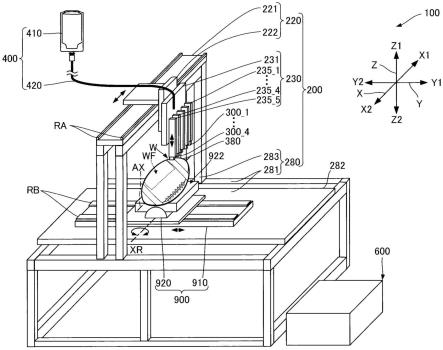
6.图1为表示第一实施方式所涉及的立体物印刷装置100的概要的立体图。
7.图2为对升降机构230与液体喷出单元300以及光出射部380的关系进行说明的图。
8.图3为表示液体喷出单元300的概要结构的立体图。
9.图4为表示第一实施方式所涉及的立体物印刷装置100的电气结构的框图。
10.图5为用于对第一实施方式中的路径信息da进行说明的图。
11.图6为将表示第一实施方式所涉及的立体物印刷方法的流程的流程图予以示出的图。
12.图7为表示执行第一扫描ru1的执行过程中的喷嘴面fd、出射面fu和工件w的位置的一个示例的图。
13.图8为表示执行第二扫描ru2的执行过程中的喷嘴面fd和出射面fu的位置的一个示例的图。
14.图9为表示工件移动动作wm的开始时间点下的喷嘴面fd和出射面fu的位置的一个示例的图。
15.图10为表示工件移动动作wm的结束时间点下的喷嘴面fd和出射面fu的位置的一
个示例的图。
16.图11为对第一变形例中的立体物印刷装置100a进行说明的图。
17.图12为对第二变形例中的立体物印刷装置100b进行说明的图。
18.图13为对第三变形例中的立体物印刷装置100c进行说明的图。
具体实施方式
19.以下,参照附图来对用于实施本发明的方式进行说明。但是,在各附图中,各部的尺寸以及比例尺与实际的情况适当地有所不同。此外,虽然在下文中所叙述的实施方式由于是本发明的优选的具体示例,因而被附加了技术上优选的各种各样的限定,但是对于本发明的范围而言,只要在以下的说明中没有特别地对本发明进行限定的主旨的记载,则并不限于这些方式。
20.以下的说明是适当地使用相互交叉的x轴、y轴以及z轴来进行的。此外,将沿着x轴的一个方向称为x1方向,并将与x1方向相反的方向称为x2方向。同样地,将沿着y轴且彼此相反的方向称为y1方向以及y2方向。此外,将沿着z轴且彼此相反的方向称为z1方向以及z2方向。
21.在此,x轴、y轴以及z轴为,被设定在设置有后述的作业台281的空间中的基础坐标系的坐标轴。典型而言,z轴为铅直的轴,z2方向相当于铅直方向上的下方。另外,z轴也可以不为铅直的轴。此外,虽然x轴、y轴以及z轴典型而言为相互正交,但是并不限定于此,也存在不正交的情况。例如,只要x轴、y轴以及z轴以80
°
以上且100
°
以下的范围内的角度而彼此交叉即可。
22.1.第一实施方式
23.1-1.立体物印刷装置的概要
24.图1为,表示第一实施方式所涉及的立体物印刷装置100的概要的立体图。立体物印刷装置100为,通过喷墨方式而在立体的工件w的表面上实施印刷的装置。
25.工件w为印刷介质,且具有成为印刷对象的面wf。在图1所示的示例中,工件w为围绕长轴ax的呈椭球状的橄榄球,面wf为曲率不固定的曲面。在本实施方式中,工件w被配置为,长轴ax与x轴平行。另外,工件w并不限定于橄榄球。例如,工件w为成为某些制品的物体,且在面wf上实施印刷为制造该制品的一系列工序之一。在此,工件w的形状或者大小等形态并不限定于图1所示的示例,其是任意的。例如,工件w的表面也可以具有平面、阶梯面或者凹凸面等面。例如,虽然图1所例示的面wf在z2方向上进行观察时为凸曲面,但是也可以在z2方向上进行观察时为凹曲面。此外,工件w的设置姿态也并不限定于图1所示的示例,其是任意的。
26.在图1所示的示例中,立体物印刷装置100为,使用在两个正交的轴上进行移动的正交机械手的喷墨打印机。具体而言,如图1所示那样,立体物印刷装置100具有移动机构200、四个液体喷出单元300、光出射部380、液体供给单元400、控制器600和工件支承机构900。四个液体喷出单元300为液体喷出单元300_1~300_4。在以下的记载中,存在有将液体喷出单元300_1~300_4分别记载为液体喷出单元300的情况。以下,对图1所示的立体物印刷装置100的各部依次简单地进行说明。
27.移动机构200使液体喷出单元300以及光出射部380相对于工件w的相对位置发生
变化。移动机构200具有直动机构220、升降机构230和支承部280。
28.直动机构220使四个液体喷出单元300以及光出射部380相对于工件w的相对位置沿着x轴而发生变化。直动机构220具有导轨部件221和滑架222。导轨部件221为,用于使滑架222沿着x轴进行移动的扁平状的部件。并且,在导轨部件221的z1方向的面上,设置有沿着x轴的两个导轨ra。两个导轨ra沿着x轴而延伸。滑架222以能够滑动的方式与导轨ra相啮合。另外,虽然并未进行图示,但是在直动机构220上设置有使滑架222移动的驱动机构。该驱动机构例如具有产生用于该移动的驱动力的电机、将该驱动力减速并输出的减速器、和对该移动的动作量进行检测的水平编码器223。水平编码器223在图4中示出。
29.另外,x轴为“第一轴”的一个示例。
30.升降机构230使四个液体喷出单元300以及光出射部380沿着z轴而进行移动。升降机构230具有支承板231和五个独立升降机构235。五个独立升降机构235为独立升降机构235_1~235_5。在以下的记载中,有时会将独立升降机构235_1~235_5记载为独立升降机构235。并且,关于独立升降机构235所具有的要素,有时还会使用_x来予以表示。x为1至5的整数。
31.关于升降机构230与液体喷出单元300以及光出射部380的关系,将使用图2来进行说明。
32.图2为,对升降机构230与液体喷出单元300以及光出射部380的关系进行说明的图。图2所示的图为,在从y1方向向y2方向对升降机构230附近进行观察时的图。
33.支承板231对独立升降机构235进行支承,并且被固定在滑架222上。通过滑架222沿着x轴进行移动,从而使被安装在滑架222上的支承板231也沿着x轴进行移动。但是,升降机构230也可以代替支承板231而具有使四个液体喷出单元300以及光出射部380一律沿着z轴而移动的机构。
34.另外,z轴为“第二轴”的一个示例。
35.一个独立升降机构235使四个液体喷出单元300以及光出射部380中的任意一个沿着z轴进行移动。独立升降机构235被固定在支承板231上。在五个独立升降机构235中的四个独立升降机构235的z2方向上,作为末端执行器从而以通过螺丝固定等被固定的状态而安装有液体喷出单元300。在剩余的一个独立升降机构235的z2方向上,作为末端执行器从而以通过螺丝固定等被固定的状态而安装有光出射部380。虽然并未进行图示,但是在独立升降机构235上,设置有使液体喷出单元300或者光出射部380相对于独立升降机构235而进行移动的驱动机构。该驱动机构例如具有产生用于该移动的驱动力的电机、将该驱动力减速并输出的减速器、和对该移动的动作量进行检测的垂直编码器236。垂直编码器236在图4中示出。
36.更具体而言,在独立升降机构235_k上,安装有液体喷出单元300_k。k为1至4的整数。在独立升降机构235_5上,安装有光出射部380。独立升降机构235_1~235_5从x1方向起依次按照独立升降机构235_1、235_2、235_3、235_4、235_5的顺序被配置。
37.另外,在独立升降机构235_1~235_4中的任意的两个之中,一方为“第一升降机构”的一个示例,另一方为“第三升降机构”的一个示例。独立升降机构235_5为“第二升降机构”的一个示例。
38.将说明返回至图1。支承部280对直动机构220以及工件支承机构900进行支承。支
承部280具有作业台281和支柱283。在作业台281的顶板282上,固定有工件支承机构900。作业台281通过螺丝固定等而被固定在朝向z1方向的地板面等设置面上。另外,固定有作业台281的设置面并不限定于图1所示的示例,例如,也可以为墙壁、以及可移动的台车等所具有的面。支柱283为,对直动机构220进行支承、并在z轴上延伸的柱状的部件。
39.液体喷出单元300朝向工件w喷出作为液体的一个示例的油墨。光出射部380具有出射使从液体喷出单元300被喷出的油墨固化的光的出射面fu。更详细而言,光出射部380对出射使油墨固化的光的光源和z轴上的光出射部380相对于工件w的相对的位置关系进行检测。具体而言,光出射部380所具有的传感器为,对与相对于工件w而相对位置被固定的未图示的基准面之间的距离进行测量的光学式位移计等的距离传感器。另外,该基准面既可以为工件w的表面,也可以为与工件w不同的物体的表面。此外,该基准面所朝向的方向只要预先掌握了相对于工件w的面wf的位置以及姿态即可,其是任意的。
40.另外,光出射部380为“能量出射部”的一个示例,使油墨固化的光为“使液体固化的能量”的一个示例。
41.在本实施方式中,油墨为,使用了紫外线固化型等的固化性树脂的固化性油墨。但是,固化性油墨并不限定于紫外线固化型,例如也可以为热固化型、光固化型、放射线固化型以及电子束固化型中的任意一种。
42.此外,该油墨并不限定于溶液,也可以为使颜色材料等作为分散质而分散在分散剂中的油墨。此外,油墨并不限定于包含颜色材料的油墨,例如既可以为作为分散质而包含用于形成配线等的金属粒子等导电性粒子的油墨,也可以为透明油墨,还可以为用于工件w的表面处理的处理液。在本实施方式中,设为如下情况来进行说明,即,立体物印刷装置100利用包含蓝绿色的颜色材料的油墨、包含品红色的颜色材料的油墨、包含黄色的颜色材料的油墨、以及包含黑色的颜色材料的油墨这样的四个种类的油墨,并且光出射部380出射紫外线光的情况。以此方式,虽然在本实施方式中,由于使用四个种类的油墨,因此立体物印刷装置100也具有四个液体喷出单元300,但是液体喷出单元300的个数并不限定于四个,既可以为一个也可以为多个。此外,所使用的油墨的种类并不限定于四个种类,立体物印刷装置100既可以使用一个种类的油墨,也可以使用多种油墨。
43.在液体喷出单元300_1~300_4各自所具有的头310_1~310_4的每一个中,被供给有包含蓝绿色、品红色、黄色、黑色中的任意一种颜色材料的油墨。在头310_1~310_4的每一个中,也可以被供给有该四个种类的油墨中的任意一种油墨。但是,由于所喷落的油墨会在工件w的面wf上扩散,因此如果相对于工件w的亮度而具有较大差别的颜色的油墨在面wf上发生了扩散,则会由于油墨的扩散较为显眼从而导致印刷品质的下降。特别是在立体物印刷的情况下,印刷介质大多是非吸收性的,由于在面wf上具有倾斜,因而油墨容易在喷落后发生移动,从而容易发生渗洇。相对于工件w的颜色的亮度而具有较大差别的颜色,例如在工件w的颜色为白色的情况下,为黑色。因此,优选为,在远离光出射部380的头310_1中,供给相对于工件w的亮度而具有较小差别的颜色的油墨,在靠近光出射部380的头310_4中,供给相对于工件w的亮度而具有较大差别的颜色的油墨。
44.进一步地,在使用了紫外线固化型油墨的印刷中,具有一种在刚向工件的喷落之后就照射紫外线光而使油墨不完全固化的被称为钉扎(pinning)方法的技术。由于油墨在不完全固化的状态下流动性会降低,因此通过使用钉扎方法来抑制喷落的油墨在工件w的
面wf上发生扩散的情况,从而能够对点的大小进行调节。在以下的说明中,将在油墨刚喷落之后被照射并用于使油墨不完全固化的紫外线光称为“钉扎光”,将实质上用于使油墨完全固化的紫外线光称为“正式固化光”。通过正式固化光而被赋予给油墨的能量大于由钉扎光带来的能量。光出射部380具有出射紫外线光的光源。既可以是从光出射部380被出射的紫外光的强度能够根据钉扎光和正式固化光的用途而进行调节,也可以具有出射钉扎光的光源和出射正式固化光的光源。另外,也能够通过对紫外线光的照射时间进行适当调节,从而根据钉扎光和正式固化光的用途来对赋予给油墨的能量进行调节。此外,在以下的记载中,有时会将钉扎光和正式固化光统称为紫外线光。关于液体喷出单元300的详细内容,将使用图3来进行说明。
45.图3为,表示液体喷出单元300的概要结构的立体图。液体喷出单元300具有头310、压力调节阀320和传感器330。它们被由图3中的双点划线所示出的支承体350所支承。
46.头310具有未图示的多个压电元件、未图示的多个腔室和多个喷嘴n。腔室对油墨进行收纳。喷嘴n针对每个腔室而被设置,并且与该腔室连通。该压电元件针对每个腔室而被设置,并且通过使该腔室的压力发生变化,从而使油墨从与该腔室相对应的喷嘴n中被喷出。另外,作为用于使油墨从喷嘴喷出的驱动元件,也可以代替该压电元件而使用对腔室内的油墨进行加热的加热器。在此,在理想的条件下,由头310喷出的油墨的喷出方向为z2方向。因此,由独立升降机构235实现的液体喷出单元300的移动方向、与由头310喷出的油墨的喷出方向实质上是平行的。另外,所谓实质上平行是指,包括机械性的误差或油墨的喷出中的误差并容许
±5°
程度的偏差的概念。
47.头310具有被设置有多个喷嘴n的喷嘴面fd。在图3所示的示例中,喷嘴面fd的法线方向为z1方向,该多个喷嘴n被划分为在沿着x轴的方向上相互隔开间隔而排列的第一喷嘴列l1和第二喷嘴列l2。第一喷嘴列l1以及第二喷嘴列l2分别为,在沿着y轴的方向上排列成直线状的多个喷嘴n的集合。在此,头310中的与第一喷嘴列l1的各个喷嘴n相关联的要素、和与第二喷嘴列l2的各个喷嘴n相关联的要素为在沿着x轴的方向上相互大致对称的结构。
48.另外,液体喷出单元300_1~300_4中的、被安装在相当于“第一升降机构”的独立升降机构235上的液体喷出单元300中所包含的头310为“第一头”的一个示例,且该头310所具有的喷嘴面fd为“第一喷嘴面”的一个示例。此外,被安装在相当于“第三升降机构”的独立升降机构235上的液体喷出单元300中所包含的头310为“第二头”的一个示例,且该头310所具有的喷嘴面fd为“第二喷嘴面”的一个示例。
49.但是,第一喷嘴列l1中的多个喷嘴n和第二喷嘴列l2中的多个喷嘴n的沿着y轴的方向上的位置,既可以相互一致,也可以互不相同。此外,也可以省略与第一喷嘴列l1以及第二喷嘴列l2中的一方的各个喷嘴n相关联的要素。在下文中,例示出了第一喷嘴列l1中的多个喷嘴n和第二喷嘴列l2中的多个喷嘴n的沿着y轴的方向上的位置相互一致的结构。
50.压力调节阀320为,根据头310内的油墨的压力而进行开闭的阀机构。通过该开闭,从而将头310内的油墨的压力维持为预定范围内的负压。因此,实现了被形成在头310的喷嘴n中的油墨的弯液面的稳定化。
51.传感器330对z轴上的头310相对于工件w的相对的位置关系进行检测。具体而言,传感器330为,对与相对于工件w而相对位置被固定的未图示的基准面之间的距离进行测量的光学式位移计等的距离传感器。
52.支承体350例如由金属材料等构成,并且为实质性的刚体。另外,虽然在图3中支承体350呈扁平的箱状,但是支承体350的形状并未被特别限定,其是任意的。支承体350被安装在独立升降机构235的z2方向上。
53.在图3所示的示例中,压力调节阀320相对于头310而位于z1方向上。传感器330相对于头310而位于x1方向上。
54.供给流道420通过压力调节阀320而被划分为上游流道421和下游流道422。即,供给流道420具有使液体贮留部410与压力调节阀320连通的上游流道421、和使压力调节阀320与头310连通的下游流道422。在图3所示的示例中,供给流道420的下游流道422的一部分由流道部件422a构成。流道部件422a具有将来自压力调节阀320的油墨分配至头310的多个部位的流道。
55.将说明返回至图1。液体供给单元400为,用于向头310供给油墨的机构。液体供给单元400具有液体贮留部410和供给流道420。
56.液体贮留部410为,对油墨进行贮留的容器。液体贮留部410为,例如由可挠性的薄膜形成的袋状的油墨包。
57.在图1所示的示例中,液体贮留部410以始终位于与头310相比而靠z1方向的方式被固定在墙壁、顶棚或者柱子等上。即,液体贮留部410位于与头310的移动区域相比而靠铅直方向上的上方处。因此,即使在不使用泵等机构的条件下,也能够通过预定的加压力而从液体贮留部410向头310供给油墨。
58.供给流道420为,从液体贮留部410向头310供给油墨的流道。在供给流道420的中途处设置有压力调节阀320。因此,即使伴随着移动机构200的动作而使头310与液体贮留部410的位置关系发生了变化,也能够减少头310内的油墨的压力的变动。
59.控制器600为,对移动机构200以及工件支承机构900的驱动进行控制的机械手控制器。虽然在图1中并未进行图示,但是控制器600电连接有对液体喷出单元300中的喷出动作进行控制的控制模块。在控制器600以及该控制模块上,以能够通信的方式而连接有计算机。另外,该控制模块相当于后文叙述的图4所示的控制模块500。该计算机相当于后文叙述的图4所示的计算机700。
60.工件支承机构900对工件w进行支承,并且使工件w的位置以及姿态中的一方或者双方变化。工件支承机构900具有换行轴机构910和旋转轴机构920。换行轴机构910包括用于使工件w沿着y轴进行移动的扁平状的部件。在该部件的z1方向的面上,设置有沿着y轴的两个导轨rb。两个导轨rb沿着y轴而延伸。
61.旋转轴机构920能够以沿着x轴的旋转轴xr为中心而进行旋转。并且,旋转轴机构920具有设置面922。工件w被设置在设置面922上。当旋转轴机构920进行旋转时,设置面922的朝向会发生变化。当设置面922的朝向变化时,被设置在设置面922上的工件w的姿态发生变化。
62.1-2.立体物印刷装置的电气结构
63.图4为,表示第一实施方式所涉及的立体物印刷装置100的电气结构的框图。在图4中,示出了立体物印刷装置100的结构要素中的电气结构要素。此外,在图4中,示出了水平编码器223和垂直编码器236_1~236_5。
64.如图4所示那样,立体物印刷装置100除了具有前文所述的移动机构200、液体喷出
单元300、控制器600和工件支承机构900之外,还具有控制模块500和计算机700。以下,在对控制器600的详细内容进行说明之前,首先,对控制模块500以及计算机700依次进行说明。
65.另外,下文所叙述的各个电气结构要素,既可以被适当地分割,也可以使一部分被包含在其他的结构要素中,还可以与其他的结构要素一体地构成。
66.控制器600具有对移动机构200的驱动进行控制的功能、对工件支承机构900的驱动进行控制的功能、和生成用于使液体喷出单元300中的油墨的喷出动作与移动机构200的动作同步的信号d3的功能。控制器600具有存储电路610和处理电路620。
67.存储电路610对处理电路620所执行的各种程序、和处理电路620所处理的各种数据进行存储。
68.在存储电路610中,存储有路径信息da。路径信息da为,表示头310以及光出射部380应移动的移动路径cr的信息。路径信息da例如使用基础坐标系的坐标值来表示。路径信息da基于表示工件w的位置以及形状的工件信息从而被决定。该工件信息通过将表示工件w的三维形状的cad(computer-aideddesign:计算机辅助设计)数据等信息与前文叙述的基础坐标系建立对应关系从而被获得。以上的路径信息da从计算机700被输入至存储电路610中。
69.处理电路620基于路径信息da,从而对直动机构220、升降机构230、换行轴机构910以及旋转轴机构920的动作进行控制,并且生成信号d3。具体而言,处理电路620实施如下运算,即,将路径信息da转换为直动机构220以及升降机构230的位置以及速度等的动作量的运算、和将路径信息da转换为换行轴机构910以及旋转轴机构920的位置以及速度等的动作量的运算。然后,处理电路620基于来自水平编码器223的输出信号dx、和来自垂直编码器236_1~236_5的输出信号dz_1~dz_5而输出控制信号sx、sz_1~sz_5,以使直动机构220以及升降机构230的各自的动作量成为前述的运算结果。控制信号sx对直动机构220所具有的电机的驱动进行控制。控制信号sz_k对独立升降机构235_k所具有的电机的驱动进行控制。k为1至5的整数。在下文中,有时会将输出信号dz_1~dz_5分别称为输出信号dz。
70.同样地,处理电路620基于从换行轴机构910中所包括的编码器输出的输出信号dy、和从旋转轴机构920中所包括的编码器输出的输出信号dr而输出控制信号sy、sr,以使换行轴机构910以及旋转轴机构920的动作量成为前述的运算结果。控制信号sy对换行轴机构910所具有的电机的驱动进行控制。控制信号sr对旋转轴机构920所具有的电机的驱动进行控制。
71.此外,处理电路620基于输出信号dx、dz_1~dz_5、dy以及dr中的一个或多个而生成信号d3。例如,处理电路620基于输出信号dx、dz_1~dz_5、dy以及dr中的一个而生成信号d3。例如,处理电路620作为信号d3而生成包含例如在输出信号dx、dz_1~dz_5、dy以及dr中的一个成为预定值的定时下的脉冲的信号。
72.控制模块500为,基于从控制器600输出的信号d3和来自计算机700的印刷数据img从而对头310的喷出动作进行控制的电路。控制模块500具有定时信号生成电路510、电源电路520、控制电路530和驱动信号生成电路540。
73.定时信号生成电路510基于信号d3而生成定时信号pts。信号d3作为对由液体喷出单元300实施的油墨喷出的开始定时进行规定的触发信号而发挥功能。
74.电源电路520从未图示的商用电源接受电力的供给,并生成预定的各种电位。所生
成的各种电位被适当地供给给立体物印刷装置100的各部。
75.控制电路530基于定时信号pts,从而生成控制信号si_1~si_4、波形指定信号dcom、锁存信号lat、时钟信号clk和交换信号cng。这些信号与定时信号pts同步。这些信号中的波形指定信号dcom被输入至驱动信号生成电路540中,除此以外的信号被输入至液体喷出单元300的开关电路340中。但是,控制信号si_k为,被供给至液体喷出单元300_k的开关电路340中的信号。k为1至4的整数。在以下的记载中,有时会将控制信号si_1~si_4分别记载为控制信号si。
76.控制信号si为,用于对头310所具有的压电元件的动作状态进行指定的数字的信号。具体而言,控制信号si对是否向压电元件供给后述的驱动信号com进行指定。锁存信号lat以及交换信号cng通过以与控制信号si并用的方式来对压电元件的驱动定时进行规定,从而对来自喷嘴n的油墨的喷出定时进行规定。时钟信号clk为,成为与定时信号pts同步的基准的时钟信号。关于以上的信号中的被输入至液体喷出单元300的开关电路340中的信号,将在后文进行详细叙述。
77.驱动信号生成电路540为,生成用于对头310所具有的各个压电元件进行驱动的驱动信号com的电路。具体而言,驱动信号生成电路540例如具有da转换电路和放大电路。在驱动信号生成电路540中,通过该da转换电路将来自控制电路530的波形指定信号dcom从数字信号转换为模拟信号,该放大电路使用来自电源电路520的电源电位vhv而将该模拟信号放大,从而生成驱动信号com。在此,驱动信号com中所包含的波形中的、实际被供给至压电元件中的波形的信号为驱动脉冲pd。驱动脉冲pd经由开关电路340,从而从驱动信号生成电路540被供给至压电元件。开关电路340基于控制信号si从而对如下情况进行切换,即,是否将驱动信号com中所包含的波形中的至少一部分作为驱动脉冲pd而进行供给。
78.计算机700具有向控制器600供给路径信息da等信息的功能、向控制模块500供给印刷数据img等信息的功能、和对光出射部380的驱动进行控制的功能。作为计算机700,例如可以使用个人计算机。
79.1-3.立体物印刷装置100的动作以及立体物印刷方法
80.图5为,用于对第一实施方式中的路径信息da进行说明的图。在图5中,示出了从z1方向向z2方向对头310以及光出射部380相对于工件w的路径信息da所表示的移动路径cr进行观察时的状态。在第一实施方式中,立体物印刷装置100对第一扫描ru1、第二扫描ru2、避让动作rt1、工件移动动作wm、返回动作rt2、第三扫描ru3和第四扫描ru4按照该顺序来执行。以此方式,避让动作rt1、工件移动动作wm和返回动作rt2在第二扫描ru2与第三扫描ru3之间的期间内被执行。将使头310以及光出射部380从x2方向向x1方向移动并继续使头310以及光出射部380从x1方向向x2方向移动的情况称为“循环”。在本实施方式中,通过第一扫描ru1和第二扫描ru2而形成一个循环,通过第三扫描ru3和第四扫描ru4而形成一个循环。以此方式,虽然在本实施方式中,立体物印刷装置100执行了两个循环,但是也可以执行一个循环,还可以执行三个以上的循环。
81.在图5中,为了清楚地示出第一扫描ru1和第二扫描ru2,从而以在y轴上分离的方式来显示第一扫描ru1的轨迹和第二扫描ru2的轨迹。然而,实际上,第一扫描ru1的开始位置ps1与第二扫描ru2的结束位置pe2大致一致,第一扫描ru1的结束位置pe1与第二扫描ru2的开始位置ps2大致一致,第一扫描ru1的轨迹与第二扫描ru2的轨迹大致一致。所谓大致一
致是指,除了完全一致的情况之外,还包括如果考虑到制造上的误差则也可视为一致的情况。但是,也可以使第一扫描ru1的开始位置ps1与第二扫描ru2的结束位置pe2不同,也可以使第一扫描ru1的结束位置pe1与第二扫描ru2的开始位置ps2不同,还可以使第一扫描ru1的轨迹与第二扫描ru2的轨迹不同。同样地,以在y轴上分离的方式来显示第三扫描ru3和第四扫描ru4。但是,实际上,第三扫描ru3的开始位置ps3与第四扫描ru4的结束位置pe4大致一致,第三扫描ru3的结束位置pe3与第四扫描ru4的开始位置ps4大致一致,第三扫描ru3的轨迹与第四扫描ru4的轨迹大致一致。对于第三扫描ru3和第四扫描ru4而言,也与第一扫描ru1和第二扫描ru2同样。
82.第一扫描ru1以及第三扫描ru3为,使头310以及光出射部380相对于工件w的相对位置向x1方向移动的动作。第二扫描ru2以及第四扫描ru4为,使头310以及光出射部380相对于工件w的相对位置向x2方向移动的动作。在本实施方式中,在第一扫描ru1、第二扫描ru2、第三扫描ru3以及第四扫描ru4的执行过程中,工件支承机构900并不进行驱动。然而,也可以在第一扫描ru1、第二扫描ru2、第三扫描ru3以及第四扫描ru4中的任意一个的执行过程中,使工件支承机构900进行驱动。
83.另外,x1方向为“第一方向”的一个示例,x2方向为“第三方向”的一个示例。
84.此外,避让动作rt1为,使头310以及光出射部380相对于工件w的相对位置从第二扫描ru2的结束位置pe2向避让位置pt1移动的动作,其中,所述避让位置pt1为,在沿着z轴的方向上进行观察时,喷嘴面fd和出射面fu不与工件w发生重叠的位置。工件移动动作wm为,使工件w的位置以及姿态中的一方或者双方发生变化的动作。所谓两个物体发生重叠的含义是指,一个物体的一部分或者全部与另一个物体的一部分或者全部重叠的意思。工件w的位置或者姿态发生变化的结果为,使喷嘴面fd和出射面fu相对于工件w的位置从避让位置pt1移动至避让位置pt2。避让位置pt2在于沿着z轴的方向上进行观察时,也使喷嘴面fd和出射面fu不与工件w发生重叠。返回动作rt2为,使头310以及光出射部380相对于工件w的相对位置从避让位置pt2移动至第三扫描ru3的开始位置ps3的动作。
85.图6为,表示第一实施方式所涉及的立体物印刷方法的流程的流程图。如图6所示那样,立体物印刷装置100针对执行第一扫描ru1的步骤s110、执行第二扫描ru2的步骤s120、执行避让动作rt1的步骤s130、执行工件移动动作wm的步骤s140、执行返回动作rt2的步骤s150、执行第三扫描ru3的步骤s160、和执行第四扫描ru4的步骤s170而按照该顺序来执行。另外,图6所示的动作通过计算机700经由控制器600以及控制模块500来对移动机构200以及液体喷出单元300进行控制从而被执行。
86.在步骤s110中的第一扫描ru1的执行过程中,通过独立升降机构235_1~235_5中的一个或多个的驱动,从而使喷嘴面fd与出射面fu的相对位置发生变化。使用图7来对第一扫描ru1中的喷嘴面fd、出射面fu和工件w的位置关系进行说明。
87.图7为,表示执行第一扫描ru1的执行过程中的喷嘴面fd、出射面fu和工件w的位置的一个示例的图。在图7以及图8中,为了避免附图的繁杂化,从而省略了头310_2~310_4、和头310_2~310_4的喷嘴面fd的标记。在执行第一扫描ru1的执行过程中,头310根据控制信号si,从而相对于工件w而喷出油墨。在图7中,示出了从头310中被喷出的液滴dr。进一步地,在第一扫描ru1的执行过程中,光出射部380相对于工件w而出射钉扎光uv1。
88.在第一扫描ru1中,通过直动机构220进行驱动,从而使头310_1~310_4和光出射
部380向x1方向进行移动。此外,与直动机构220的驱动同时地,独立升降机构235_1~235_4以使z2方向上的喷嘴面fd与面wf的距离保持距离d1的方式进行驱动。z2方向上的头310与工件w之间的距离也被称为“工件间隙”。同样地,独立升降机构235_5以使z2方向上的出射面fu与面wf的距离保持距离d5的方式进行驱动。如图7所例示的那样,距离d1短于距离d5。在以下的记载中,有时也将z2方向上的光出射部380与工件w之间的距离称为“工件间隙”。另外,z2方向为“第二方向”的一个示例。另外,如果头310的工件间隙未被适当调节,则存在头310所喷出的油墨的飞翔距离变长,从而使喷落到工件上的位置的精度下降的情况。此外,如果光出射部380的工件间隙未被适当调节,则存在从光出射部380被出射的能量衰减,从而使油墨的固化变得不充分的情况。如上文所述那样,工件间隙会给印刷的品质带来影响。
89.将说明返回至图6。在步骤s120中的第二扫描ru2的执行过程中,独立升降机构235_1~235_4不进行驱动,独立升降机构235_5进行驱动。使用图8,对第二扫描ru2中的喷嘴面fd、出射面fu和工件w的位置关系进行说明。
90.图8为,表示执行第二扫描ru2的执行过程中的喷嘴面fd和出射面fu的位置的一个示例的图。在第二扫描ru2的执行过程中,头310相对于工件w并不喷出油墨。另一方面,在第二扫描ru2的执行过程中,光出射部380相对于工件w而出射正式固化光uv2。在此,通过使正式固化光uv2的强度高于钉扎光uv1的强度,从而能够使在第一扫描ru1时喷落到工件上的油墨充分地固化。此外,如果使第二扫描ru2中的直动机构220的移动速度低于第一扫描ru1,则能够延长正式固化光uv2的照射时间,从而能够使在第一扫描ru1时喷落到工件上的油墨充分地固化。
91.在第二扫描ru2的执行过程中,由于头310并不喷出油墨,因此z2方向上的喷嘴面fd与面wf的距离e1无需维持固定。更详细而言,在第二扫描ru2的执行过程中,头310的各自的喷嘴面fd的彼此的相对位置没有发生变化。此外,优选为,在第二扫描ru2的执行过程中,头310的喷嘴面fd的沿着z轴的方向上的位置不发生变化。在第二扫描ru2中,通过直动机构220进行驱动,从而使头310_1~310_4和光出射部380向x2方向进行移动。独立升降机构235_1~235_4以使头310的各自的喷嘴面fd的沿着z轴的方向上的位置za相等的方式来进行驱动。具体而言,独立升降机构235_1~235_4在第二扫描ru2的开始位置ps2处,以使头310的各自的喷嘴面fd的沿着z轴的方向上的位置za相等的方式来进行驱动,并直到第二扫描ru2的执行结束为止而停止驱动。独立升降机构235_5以使z2方向上的出射面fu与面wf的距离保持距离e5的方式来进行驱动。在此,在第二扫描ru2的执行过程中,距离e5短于距离e1。
92.将说明返回至图6。在步骤s130中的避让动作rt1中,通过直动机构220进行驱动,从而使头310_1~310_4和光出射部380向x2方向进行移动。
93.在步骤s140中的工件移动动作wm中,工件支承机构900通过换行轴机构910以及旋转轴机构920的驱动,从而使工件w的位置以及姿态中的一方或者双方变化。进一步地,在工件移动动作wm中,为了缩短在工件移动动作wm之后被执行的第三扫描ru3的执行中所花费的时间,通过独立升降机构235_1~235_5中的一个或多个的驱动,从而使喷嘴面fd和出射面fu中的一个或多个沿着z轴而进行移动。关于工件移动动作wm中的喷嘴面fd和出射面fu的移动,将使用图9以及图10来进行说明。
94.图9为,表示工件移动动作wm的开始时间点时下的喷嘴面fd和出射面fu的位置的一个示例的图。在本实施方式中,设为在工件移动动作wm的开始时间点下,头310的各自的喷嘴面fd以及出射面fu的沿着z轴的方向上的位置,从第二扫描ru2的结束时间点起不发生移动。具体而言,头310的各自的喷嘴面fd的沿着z轴的方向上的位置为位置za。另一方面,出射面fu的沿着z轴的方向上的位置为,从第二扫描ru2的结束位置pe2起向z1方向移动了距离e5的量的位置。
95.图10为,表示工件移动动作wm的结束时间点下的喷嘴面fd和出射面fu的位置的一个示例的图。通过独立升降机构235_1~235_5的驱动,从而以在第三扫描ru3的开始位置ps3处接近头310的各自的喷嘴面fd以及出射面fu的沿着z轴的方向上的位置的方式使喷嘴面fd和出射面fu沿着z轴而进行移动。具体而言,头310_1通过独立升降机构235_1的驱动,从而朝向从第三扫描ru3的开始位置ps3起向z1方向移动了距离d1的量的位置进行移动。此外,光出射部380通过独立升降机构235_5的驱动,从而朝向从开始位置ps3起向z1方向移动了距离d5的量的位置进行移动。
96.将说明返回至图6。在步骤s150中的返回动作rt2中,通过直动机构220进行驱动,从而使头310_1~310_4和光出射部380向x1方向进行移动。
97.在步骤s160中的第三扫描ru3的执行过程中,通过独立升降机构235_1~235_5中的一个或多个的驱动,从而使喷嘴面fd与出射面fu的相对位置发生变化。在第三扫描ru3的执行过程中,头310根据控制信号si,从而相对于工件w而喷出油墨。进一步地,在第三扫描ru3的执行过程中,光出射部380相对于工件w而出射钉扎光uv1。由于第三扫描ru3中的喷嘴面fd、出射面fu和工件w的位置关系与第一扫描ru1中的喷嘴面fd、出射面fu和工件w的位置关系是同样的,因此省略图示。
98.在步骤s170中的第四扫描ru4的执行过程中,独立升降机构235_1~235_4并不进行驱动,而是独立升降机构235_5进行驱动。喷嘴面fd与出射面fu的相对位置发生变化。在第四扫描ru4的执行过程中,头310相对于工件w并不喷出油墨。另一方面,在第四扫描ru4的执行过程中,光出射部380相对于工件w而出射正式固化光uv2。由于第四扫描ru4中的喷嘴面fd、出射面fu和工件w的位置关系与第二扫描ru2中的喷嘴面fd、出射面fu和工件w的位置关系是同样的,因此省略图示。
99.1-4.第一实施方式的总结
100.以下,使用独立升降机构235_1相当于“第一升降机构”、独立升降机构235_2相当于“第三升降机构”的示例,来对第一实施方式中的立体物印刷装置100进行说明。
101.第一实施方式中的立体物印刷装置100具有:头310_1,其具有被设置有喷出油墨的喷嘴n的喷嘴面fd_1;光出射部380,其具有出射使从头310_1被喷出的油墨固化的光的出射面fu;移动机构200,其使头310_1以及光出射部380相对于立体工件w的相对位置发生变化。移动机构200具备:直动机构220,其使头310_1以及光出射部380相对于工件w的相对位置沿着x轴而发生变化;独立升降机构235_1,其使喷嘴面fd_1沿着与x轴交叉的z轴进行移动;独立升降机构235_5,其使出射面fu沿着z轴进行移动。
102.根据第一实施方式,由于头310_1和光出射部380通过各自的独立升降机构235而进行升降,因此能够在根据工件w的形状,从而在以成为适当的工件间隙的方式进行调节的同时进行印刷。此外,能够防止工件w与头310发生干涉的情况。进一步地,根据第一实施方
式,与头310_1和光出射部380通过一个独立升降机构235来进行升降的方式相比,能够将沿着z轴而独立移动的结构要素的沿着x轴的方向上的宽度设计得较窄。因此,由于即使在工件w具有凹凸的情况下,也能够使头310或光出射部380进入该凹凸之间,因此能够在抑制与工件w的干涉的同时以适当的工件间隙来进行油墨的喷出以及油墨的固化,故此能够提升印刷品质。
103.如果将使头310_1以及光出射部380相对于工件w的相对位置向沿着x轴的x1方向进行移动的动作设为第一扫描ru1,则在第一扫描ru1的执行过程中,头310_1相对于工件w而喷出油墨。此外,在第一扫描ru1的执行过程中,通过独立升降机构235_1以及独立升降机构235_5中的至少一方的驱动,从而使喷嘴面fd_1与出射面fu的相对位置发生变化。
104.以此方式,由于使独立升降机构235_1以及独立升降机构235_5以独立的方式进行升降,因此能够在根据工件w的形状,从而以成为适当的工件间隙的方式来进行调节的同时进行印刷。此外,能够防止工件w与头310发生干涉的情况。此外,由于即使在工件w具有凹凸的情况下,也能够使头310或光出射部380进入该凹凸之间,因此能够提升印刷品质。
105.此外,在第一扫描ru1的执行过程中,光出射部380相对于工件w而出射钉扎光。
106.因此,在第一扫描ru1中,能够在头310_1刚喷出了油墨之后,通过钉扎光来抑制油墨在面wf上发生扩散的情况。
107.此外,在第一扫描ru1的执行过程中,沿着z轴的z2方向上的喷嘴面fd_1与工件w之间的距离d1短于z2方向上的出射面fu与工件w之间的距离d5。
108.在第一扫描ru1中,通过使喷嘴面fd_1与出射面fu相比而优先地接近工件w的面wf,从而与距离d1长于距离d5的方式相比较,立体物印刷装置100能够提升油墨的喷落位置的精度。
109.此外,如果将使头310_1以及光出射部380相对于工件w的相对位置向与x1方向为相反方向的x2方向进行移动的动作设为第二扫描ru2,则第二扫描ru2与第一扫描ru1相比靠后被执行。在第二扫描ru2的执行过程中,光出射部380相对于工件w而出射正式固化光。在第二扫描ru2的执行过程中,沿着z轴的z2方向上的出射面fu与工件w的距离e5短于z2方向上的喷嘴面fd_1与工件w的距离e1。
110.在第二扫描ru2中,通过与喷嘴面fd_1相比使出射面fu优先地接近工件w的面wf,从而与距离e5长于距离e1的方式相比,能够抑制工件w上的未固化油墨的残留。此外,存在如下情况,即,被出射面fu出射的正式固化光的一部分通过面wf而发生反射并被入射至喷嘴n中的情况。如果紫外线光被入射至喷嘴n中,则会使喷嘴附近的油墨发生固化,从而使喷嘴n堵塞并产生喷出异常。根据本实施方式,由于与距离e5长于距离e1的方式相比,能够抑制被入射至喷嘴n的光量,因此能够抑制头310_1的喷嘴n附近的油墨的固化。
111.此外,在第二扫描ru2的执行过程中,头310_1相对于工件w并不喷出油墨。
112.由于头310_1相对于工件w并不喷出油墨,因此能够使头310_1远离工件w。由于通过使头310_1远离工件w从而能够抑制被入射至头310_1的喷嘴n中的光量,因此能够抑制头310_1的喷嘴n附近处的油墨的固化。
113.此外,第二扫描ru2的执行过程中的由光出射部380出射的正式固化光的出射强度高于第一扫描ru1的执行过程中的钉扎光的出射强度。
114.能够抑制第二扫描ru2中的工件w上的未固化油墨的残留,并且抑制第一扫描ru1
中的由钉扎光导致的喷嘴附近处的油墨的固化。
115.此外,立体物印刷装置100具有头310_2,所述头310_2具有被设置有喷出油墨的喷嘴n的喷嘴面fd_2。移动机构200具备独立升降机构235_2,所述独立升降机构235_2使喷嘴面fd_2沿着z轴进行移动。在第一扫描ru1的执行过程中,头310_2相对于工件w而喷出油墨。在第一扫描ru1的执行过程中,通过独立升降机构235_1以及独立升降机构235_2中的一方或者双方的驱动,从而使喷嘴面fd_1与喷嘴面fd_2的相对位置发生变化。在第二扫描ru2的执行过程中,喷嘴面fd_1与喷嘴面fd_2的相对位置不发生变化。
116.在第一扫描ru1中,通过使头310_1以及头310_2独立地进行升降,从而能够根据工件w的形状,从而在以成为适当的工件间隙的方式来进行调节的同时进行印刷。此外,能够防止工件w与头310发生干涉的情况。进一步地,由于在第二扫描ru2中并不喷出油墨,因此无需使独立升降机构235_1以及独立升降机构235_2进行动作。因此,在第二扫描ru2中,可以不使独立升降机构235_1以及独立升降机构235_2进行驱动,从而与使独立升降机构235_1以及独立升降机构235_2进行驱动的方式相比,能够抑制立体物印刷装置100的消耗电力。
117.此外,在第二扫描ru2的执行过程中,喷嘴面fd_1与喷嘴面fd_2的沿着z轴的方向上的位置za大致相等。
118.通过使喷嘴面fd_1与喷嘴面fd_2的沿着z轴的方向上的位置za相等,并且通过使该位置za位于与工件w的最靠z1方向的位置相比靠z1方向,从而能够防止头310_1以及头310_2与工件w发生干涉的情况。
119.此外,立体物印刷装置100具备工件支承机构900,所述工件支承机构900对工件w进行支承,并使工件w的位置以及姿态中的一方或者双方发生变化。
120.通过具备工件支承机构900,从而立体物印刷装置100能够对立体的工件w与头310_1的位置关系进行适当调节。
121.此外,如果将与第二扫描ru2相比靠后被执行并且使头310_1以及光出射部380相对于工件w的相对位置向x1方向进行移动的动作设为第三扫描ru3,则在第三扫描ru3的执行过程中,头310_1相对于工件w而喷出油墨。在第二扫描ru2与第三扫描ru3之间的期间内,工件支承机构900执行使工件w的位置以及姿态中的一方或者双方发生变化的工件移动动作wm。通过执行工件移动动作wm,从而立体物印刷装置100能够在多个循环之间对工件w进行移动。
122.此外,工件移动动作wm在第二扫描ru2与第三扫描ru3之间的一部分的期间内被执行。在工件移动动作wm的执行过程中,在于沿着z轴的方向上进行观察时,喷嘴面fd_1和出射面fu不与工件w发生重叠。
123.以此方式,由于头310_1和光出射部380被避让到了喷嘴面fd_1和出射面fu不与工件w发生重叠的位置处,因此能够在不考虑工件w与头310_1和光出射部380发生干涉的可能性的条件下,对工件w的位置进行适当调节。
124.此外,在工件移动动作wm的执行过程中,通过独立升降机构235_1以及独立升降机构235_2中的一方或者双方的驱动,从而使喷嘴面fd_1以及出射面fu中的一方或者双方沿着z轴而进行移动。
125.在工件移动动作wm的执行过程中,通过以配合第三扫描ru3的开始位置ps3的方式来对头310_1以及光出射部380的z轴的位置进行调节,从而能够缩短循环间的非印刷时间。
因此,能够缩短包括工件w在内的制品的制造工序所需要的时间,从而提高生产率。
126.2.变形例
127.上文所例示的各个方式能够进行多种多样的变形。具体的变形方式将在下文中进行例示。从以下的示例中任意地选出的两种以上的方式能够在相互不矛盾的范围内被适当合并。
128.2-1.第一变形例
129.在第一实施方式中,立体物印刷装置100也可以在头310与光出射部380之间具有对紫外线光进行遮光的遮光板390。
130.图11为,对第一变形例中的立体物印刷装置100a进行说明的图。立体物印刷装置100a在代替光出射部380而具有光出射部380a这一点上,与立体物印刷装置100有所不同。光出射部380a的、在x1方向的侧面上粘合有遮光板390的这一点,与光出射部380有所不同。遮光板390为,在yz平面上延伸的扁平状的部件。遮光板390具有z1方向的第一部分391和第二部分392。第一部分391的x2方向的面被粘合在光出射部380a上。第二部分392对从光出射部380被出射的紫外线光进行遮光。
131.根据第一变形例,由于通过第二部分392对紫外线光进行遮光,从而能够抑制被入射至喷嘴n的光量,因此能够抑制头310_1的喷嘴n附近处的油墨的固化。
132.另外,虽然在第一变形例中,遮光板390被粘合在光出射部380的x1方向的侧面上,但是并不限定于此。例如,遮光板390也可以被粘合在液体喷出单元300_4的x2方向的侧面上。
133.2-2.第二变形例
134.虽然在上述的各个方式中,立体物印刷装置100具有使液体喷出单元300_1~300_4分别进行升降的独立升降机构235_1~4、和使光出射部380进行升降的独立升降机构235,但是使光出射部380进行升降的独立升降机构235、和使最接近于光出射部380的液体喷出单元300_4进行升降的独立升降机构235也可以为同一个。
135.图12为,对第二变形例中的立体物印刷装置100b进行说明的图。立体物印刷装置100b在代替升降机构230而具有升降机构230b、代替光出射部380而具有光出射部380b这一点上,与立体物印刷装置100不同。升降机构230b在不具有独立升降机构235_5、且代替独立升降机构235_4而具有独立升降机构235_4b这一点上,与升降机构230不同。
136.在液体喷出单元300_4的x2方向的侧面上,粘合有光出射部380b。独立升降机构235_4b通过使液体喷出单元300_4进行升降,从而使光出射部380b也进行升降。
137.另外,在第二变形例中,独立升降机构235_1~235_3中的任意两个中的一方为“第一升降机构”的一个示例,另一方为“第三升降机构”的一个示例。独立升降机构235_4b为“第二升降机构”的一个示例。
138.2-3.第三变形例
139.虽然在上述的各个方式中,立体物印刷装置100针对四个头310而具有一个光出射部380,但是也可以针对一个头310而具有一个光出射部380。
140.图13为,对第三变形例中的立体物印刷装置100c进行说明的图。立体物印刷装置100c在具有光出射部380_1~380_4这样的四个光出射部380这一点上,与立体物印刷装置100不同。对于m分别为1至3的情况,光出射部380_m被设置在液体喷出单元300_m与液体喷
出单元300_m+1之间,并相对于头310_m所喷出的油墨而出射钉扎光。此外,光出射部380_4被设置在液体喷出单元300_4的x2方向上,且相对于头310_4所喷出的油墨而出射钉扎光,并且相对于头310_1~310_4所喷出的油墨而出射正式固化光。以此方式,由于光出射部380_4出射正式固化光、光出射部380_1~380_3出射钉扎光,因此光出射部380_4能够出射与光出射部380_1~380_3相比而强度较高的紫外线光。
141.光出射部380_1~380_4也与液体喷出单元300_1~300_4同样地进行升降。例如,对于k分别为1至4的情况而言,独立升降机构235_k使光出射部380_k和液体喷出单元300_k进行升降。或者,对于k分别为1至4的情况而言,立体物印刷装置100b也可以与使液体喷出单元300_k进行升降的独立升降机构235_k不同地具有使光出射部380_k进行升降的独立升降机构235。
142.2-4.第四变形例
143.虽然在上述的各个方式中,立体物印刷装置100具有使各个液体喷出单元300进行升降的各自的独立升降机构235,但是也可以由一个独立升降机构235来使多个液体喷出单元300进行升降。例如,第四变形例中的立体物印刷装置100具有两个独立升降机构235、液体喷出单元300_1~300_4和光出射部380。两个独立升降机构235中的一个独立升降机构235使液体喷出单元300_1和液体喷出单元300_2进行升降,另一个独立升降机构235使液体喷出单元300_3、液体喷出单元300_4和光出射部380进行升降。
144.2-5.第五变形例
145.虽然在上述的各个方式中的第一扫描ru1、第二扫描ru2、第三扫描ru3以及第四扫描ru4的执行过程中,通过直动机构220进行驱动,从而使头310以及光出射部380相对于工件w的沿着x轴的方向上的位置发生变化,但是并不限定于此。具体而言,也可以通过工件支承机构900进行驱动而使工件w在沿着x轴的方向上进行移动,从而使头310以及光出射部380相对于工件w的位置发生变化。也就是说,使头310以及光出射部380相对于工件w的沿着x轴的方向上的相对位置发生变化的手段并未被限定。
146.2-6.第六变形例
147.也可以在上述的各个方式的第一扫描ru1中,使z2方向上的喷嘴面fd与面wf的距离d1长于z2方向上的出射面fu与面wf的距离d5。
148.2-7.第七变形例
149.也可以在上述的各个方式的第二扫描ru2中,使z2方向上的出射面fu与面wf的距离e5长于z2方向上的喷嘴面fd与面wf的距离e1。
150.2-8.第八变形例
151.虽然在上述的各个方式中,立体物印刷装置100在第一扫描ru1之后执行第二扫描ru2,但是也可以不执行第二扫描ru2,即,也可以不执行钉扎方法。例如,在第一扫描ru1中,光出射部380出射正式固化光。
152.2-9.第九变形例
153.也可以在上述的各个方式中的工件移动动作wm的执行过程中,不使独立升降机构235_1以及独立升降机构235_2进行驱动。
154.2-10.第十变形例
155.在上述的各个方式中,也可以采用如下方式,即,立体物印刷装置100在执行工件
移动动作wm的情况下,在于沿着z轴的方向上进行观察时,喷嘴面fd_1和出射面fu与工件w重叠。具体而言,立体物印刷装置100也可以在第二扫描ru2的结束后,在使头310_1~310_4和光出射部380向不与工件w发生干涉的z1方向进行了移动之后,执行工件移动动作wm。即,在第十变形例中,在工件移动动作wm的执行过程中,在于沿着z轴的方向上进行观察时,喷嘴面fd_1和出射面fu与工件w重叠。
156.作为第十变形例的具体例,升降机构230也可以具有使独立升降机构235_1~235_5一律升降的整体升降机构。而且,立体物印刷装置100也可以通过在第二扫描ru2的结束后,作为避让动作rt1而利用整体升降机构来使独立升降机构235_1~235_5一律向z1方向进行移动,从而使头310_1~310_4和光出射部380向不与工件w发生干涉的z1方向进行移动。
157.符号说明
158.100、100a、100b、100c
…
立体物印刷装置;200
…
移动机构;220
…
直动机构;221
…
导轨部件;222
…
滑架;223
…
水平编码器;230、230b
…
升降机构;231
…
支承板;235、235_1~235_5、235_4b
…
独立升降机构;236
…
垂直编码器;280
…
支承部;281
…
作业台;282
…
顶板;283
…
支柱;300、300_1~300_4
…
液体喷出单元;310、310_1~310_4
…
头;320
…
压力调节阀;330
…
传感器;340
…
开关电路;350
…
支承体;380、380_1~380_4
…
光出射部;390
…
遮光板;391
…
第一部分;392
…
第二部分;400
…
液体供给单元;410
…
液体贮留部;420
…
供给流道;421
…
上游流道;422
…
下游流道;422a
…
流道部件;500
…
控制模块;510
…
定时信号生成电路;520
…
电源电路;530
…
控制电路;540
…
驱动信号生成电路;600
…
控制器;610
…
存储电路;620
…
处理电路;700
…
计算机;900
…
工件支承机构;910
…
换行轴机构;920
…
旋转轴机构;922
…
设置面;ax
…
长轴;clk
…
时钟信号;cng
…
交换信号;cr
…
移动路径;com
…
驱动信号;d2_1~d2_5、d3
…
信号;dr
…
液滴;da
…
路径信息;dr、dx、dy、dz_1
…
输出信号;fd、fd_1~fd_5
…
喷嘴面;fu
…
出射面;img
…
印刷数据;l1
…
第一喷嘴列;l2
…
第二喷嘴列;lat
…
锁存信号;n
…
喷嘴;pd
…
驱动脉冲;pe1~pe4
…
结束位置;ps1~ps4
…
开始位置;pt1、pt2
…
避让位置;pts
…
定时信号;ra、rb
…
导轨;rt1
…
避让动作;rt2
…
返回动作;ru1
…
第一扫描;ru2
…
第二扫描;ru3
…
第三扫描;ru4
…
第四扫描;si、si_1、sr、sv_k、sx、sy、sz_1~sz_5
…
控制信号;uv1
…
钉扎光;uv2
…
正式固化光;vbs
…
偏置电位;vhv
…
电源电位;w
…
工件;wf
…
面;wm
…
工件移动动作;xr
…
旋转轴;y
…
升降轴;d1、d5、e1、e5
…
距离;dcom
…
波形指定信号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1