一种用于丝印机的上相机对位机构的制作方法
1.本实用新型涉及柔性电路板印刷技术领域,尤其涉及一种用于丝印机的上相机对位机构。
背景技术:
2.在柔性电路板进行丝印过程中,需要调整丝印机的丝印板上的网版孔位置以及柔性电路板上需要塞孔的位置,在现有的技术中,均是通过固定在丝印机机架上的ccd相机拍摄并进行定位后,再调整丝印平台进行对位的,而此类固定在丝印机机架上的ccd相机则会使得整个设备体积偏大,不利于企业进行放置;
3.为了进一步缩减设备的体积,许多厂商将ccd相机改成了移动式的,改成移动式之后设备高度则能够缩减,内部的空间则能够安装丝印装置,ccd相机移动式的运行过程为:在对柔性电路板进行对位时,上料机械手先将柔性电路板吸附并搬运移动至丝印平台上,然后通过移动的机构将ccd相机移动至丝印平台的正上方,再调整丝印平台进行对位,完成对位后再由下料机械手将柔性电路板吸附并从丝印平台上移走;此过程则是有三个需要运动的机构来支撑,分别是上料机械手移动机构、相机移动机构、下料机械手移动机构,而这三个运动机构增加了生产成本,同时也在横向扩大了对外占用空间,不利于降低企业的生产成本。
4.为此,有必要提出一种用于丝印机的上相机对位机构来缩减设备对外占用空间,同时也降低了生产成本。
技术实现要素:
5.为了解决上述问题,本实用新型提出一种用于丝印机的上相机对位机构来缩减设备对外占用空间,同时也降低了生产成本。
6.本实用新型通过以下技术方案实现的:
7.本实用新型提出一种用于丝印机的上相机对位机构,包括丝印机、对位上下料机构,所述丝印机内设有工作空间,所述对位上下料机构与所述丝印机固定连接并一部分收容于所述工作空间内,所述对位上下料机构另一部分延伸出所述丝印机外部,所述丝印机内设有丝印平台,所述丝印平台位于所述工作空间的底部,所述对位上下料机构包括双动子直线运动模组、影像获取机构、卸料机械手、上料机械手,所述双动子直线运动模组固定连接于所述工作空间的侧壁上,所述双动子直线运动模组的两端均设有运动支撑臂,所述影像获取机构、所述卸料机械手均固定连接于一个所述运动支撑臂上并均朝向下方,所述上料机械手固定连接于另一个所述运动支撑臂上,所述上料机械手位于所述工作空间内,所述双动子直线运动模组、所述影像获取机构、所述卸料机械手、所述上料机械手、所述丝印平台均与所述丝印机电连接。
8.进一步的,所述影像获取机构包括两个相机模组、固定架,所述固定架固定连接于所述运动支撑臂的一端,两个所述相机模组相互平行并错开设置于所述固定架的底部,两
个所述相机模组均朝向下方。
9.进一步的,所述相机模组包括两轴驱动组件、摄像机、带光源棱镜,所述两轴驱动组件、所述摄像机、所述带光源棱镜均与所述丝印机电连接,所述两轴驱动组件固定连接于所述固定架的底部,所述摄像机、所述带光源棱镜均固定连接于所述两轴驱动组件的移动端,所述摄像机的拍摄端与所述带光源棱镜的一侧固定连接并导通,所述带光源棱镜朝向下方。
10.进一步的,所述摄像机与所述带光源棱镜垂直。
11.进一步的,所述两轴驱动组件包括安装架、第一驱动装置、第一滑动架、第二驱动装置、第二滑动架,所述安装架固定连接于所述固定架的底部,所述第一驱动装置固定连接于所述安装架的一端,所述第一驱动装置的转轴与所述第一滑动架形成丝杆连接,所述第一滑动架与所述安装架滑动连接,所述第二驱动装置固定连接于所述第一滑动架的一端,所述第二驱动装置的转轴与所述第二滑动架形成丝杆连接,所述第二滑动架与所述第一滑动架滑动连接,所述所述摄像机、所述带光源棱镜均固定连接于所述第二滑动架的一侧。
12.进一步的,所述卸料机械手包括第一升降气缸、吸附机械手,所述第一升降气缸与所述丝印机电连接,所述第一升降气缸固定连接于一个所述运动支撑臂上并位于所述影像获取机构的一侧,所述吸附机械手固定连接于所述第一升降气缸的推杆上并朝向下方。
13.进一步的,所述吸附机械手包括支撑板、多个吸嘴,所述支撑板的中部与所述第一升降气缸的推杆固定连接,多个所述吸嘴分别贯穿设置于所述支撑板上并朝向下方。
14.进一步的,所述对位上下料机构还包括清洁组件,所述清洁组件与一个所述运动支撑臂固定连接并位于所述上料机械手的一侧。
15.进一步的,所述清洁组件包括支撑架、第二升降气缸、清洁滚筒,所述第二升降气缸与所述丝印机电连接,所述第二升降气缸与一个所述运动支撑臂固定连接并位于所述上料机械手的一侧,所述支撑架的中部与所述第二升降气缸的推杆固定连接,所述清洁滚筒转动连接于所述支撑架内并延伸出所述支撑架下方。
16.进一步的,所述丝印平台下方设有用于摆正的两个自动对位模组,两个所述自动对位模组均与所述丝印机电连接,两个所述自动对位模组的移动端分别与所述丝印平台的底部进行转动连接,两个所述自动对位模组相互垂直设置。
17.本实用新型的有益效果:
18.本实用新型将影像获取机构、卸料机械手设置在同一个运动支撑臂上,在影像获取机构完成影像获取且丝印平台完成对位后,影像获取机构复位,柔性电路板进行丝印,丝印完成后,卸料机械手则再次移动至柔性电路板的上方进行吸附并搬移出外部,这样则省去了一个移动的机构,在缩减对外占用空间的同时也降低了生产成本;在对柔性电路板进行对位时,上料机械手将物料吸附并在双动子直线运动模组上的一个运动支撑臂的带动下将物料搬移至丝印平台上,然后影像获取机构以及卸料机械手在另一个运动支撑臂的带动下移动至丝印平台上方,此时影像获取机构与丝印平台对齐,先由影像获取机构获取在丝印平台上的物料影像,然后回传至丝印机上,丝印机根据所获取的影像下达相对应的摆正运行指令至丝印平台上,丝印平台对物料进行摆正对位,摆正后则进行丝印,丝印完成后,带动影像获取机构移动的运动支撑臂将卸料机械手移动至与丝印平台对齐,卸料机械手则将物料进行吸附并搬移至外部;综上所述,本用于丝印机的上相机对位机构能够节省一个
移动的机构,在缩减对外占用空间的同时也降低了生产成本,有利于在企业中进行推广。
附图说明
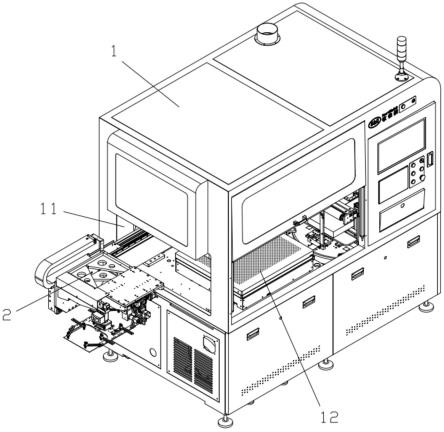
19.图1为本实用新型的用于丝印机的上相机对位机构整体示意图;
20.图2为本实用新型的用于丝印机的上相机对位机构的对位上下料机构的主视图;
21.图3为本实用新型的用于丝印机的上相机对位机构的对位上下料机构的俯视图;
22.图4为本实用新型的用于丝印机的上相机对位机构的影像获取机构以及卸料机械手的示意图;
23.图5为本实用新型的用于丝印机的上相机对位机构的相机模组示意图;
24.图6为本实用新型的用于丝印机的上相机对位机构的上料机械手以及清洁组件的示意图;
25.图7为本实用新型的用于丝印机的上相机对位机构的丝印平台示意图;
26.图8为图2标号a的局部放大示意图。
27.附图标记如下:
28.丝印机1,工作空间11,丝印平台12,自动对位模组12;
29.对位上下料机构2,双东子直线运动模组21,运动支撑臂211,影像获取机构22,相机模组221,两轴驱动组件2211,安装架22111,第一驱动装置22112,第一滑动架22113,第二驱动装置22114,第二滑动架22115,固定架222,摄像机2212,带光源棱镜2213,卸料机械手23,第一升降气缸231,吸附机械手232,支撑板2321,吸嘴2322,上料机械手24,清洁组件25,支撑架251,第二升降气缸252,清洁滚筒253。
具体实施方式
30.为了更加清楚完整的说明本实用新型的技术方案,下面结合附图对本实用新型作进一步说明。
31.请参考图1-图8,本实用新型提出一种用于丝印机的上相机对位机构,包括丝印机1、对位上下料机构2,丝印机1内设有工作空间11,对位上下料机构2与丝印机1固定连接并一部分收容于工作空间2内,对位上下料机构2另一部分延伸出丝印机1外部,丝印机1内设有丝印平台12,丝印平台12位于工作空间11的底部,对位上下料机构2包括双动子直线运动模组21、影像获取机构22、卸料机械手23、上料机械手24,双动子直线运动模组21固定连接于工作空间11的侧壁上,双动子直线运动模组21的两端均设有运动支撑臂211,影像获取机构22、卸料机械手23均固定连接于一个运动支撑臂211上并均朝向下方,上料机械手24固定连接于另一个运动支撑臂211上,上料机械手24位于工作空间11内,双动子直线运动模组21、影像获取机构22、卸料机械手23、上料机械手24、丝印平台12均与丝印机1电连接。
32.在本实施方式中:
33.丝印机1用于对柔性电路板进行丝印;
34.工作空间11用于为影像获取机构22、卸料机械手23、上料机械手24提供一个移动的空间;
35.丝印平台12用于为柔性电路板提供一个对位的平台;
36.对位上下料机构2用于将柔性电路板从物料架上获取并搬移至丝印平台12上,在
对位并丝印之后再将其搬移至外部;
37.双动子直线运动模组21用于为影像获取机构22、卸料机械手23、上料机械手24提供直线移动的动力,为现有技术;
38.影像获取机构22用于获取丝印平台12上的影像信息,并回传至丝印机1上;
39.卸料机械手23用于将丝印完毕后的柔性电路板进行吸附并搬移至外部;
40.上料机械手24用于将待丝印的柔性电路板吸附并搬移至丝印平台12上;
41.具体的,在对柔性电路板进行对位时,上料机械手24将物料吸附并在双动子直线运动模组21上的一个运动支撑臂211的带动下将物料搬移至丝印平台12上,然后影像获取机构22以及卸料机械手23在另一个运动支撑臂211的带动下移动至丝印平台12上方,此时影像获取机构22与丝印平台12对齐,先由影像获取机构22获取在丝印平台12上的物料影像,然后回传至丝印机1上,丝印机1根据所获取的影像下达相对应的摆正运行指令至丝印平台12上,丝印平台12对物料进行摆正对位,摆正后则进行丝印,丝印完成后,带动影像获取机构22移动的运动支撑臂211将卸料机械手23移动至与丝印平台12对齐,卸料机械手23则将物料进行吸附并搬移至外部;
42.综上所述,本用于丝印机的上相机对位机构能够节省一个移动的机构,在缩减对外占用空间的同时也降低了生产成本,有利于在企业中进行推广。
43.进一步的,影像获取机构22包括两个相机模组221、固定架222,固定架222固定连接于运动支撑臂221的一端,两个相机模组221相互平行并错开设置于固定架222的底部,两个相机模组221均朝向下方;相机模组221包括两轴驱动组件2211、摄像机2212、带光源棱镜2213,两轴驱动组件2211、摄像机2212、带光源棱镜2213均与丝印机1电连接,两轴驱动组件2211固定连接于固定架222的底部,摄像机2212、带光源棱镜2213均固定连接于两轴驱动组件2211的移动端,摄像机2212的拍摄端与带光源棱镜2213的一侧固定连接并导通,带光源棱镜2213朝向下方;摄像机2212与带光源棱镜2213垂直;两轴驱动组件2211包括安装架22111、第一驱动装置22112、第一滑动架22113、第二驱动装置22114、第二滑动架22115,安装架22111固定连接于固定架222的底部,第一驱动装置22112固定连接于安装架22111的一端,第一驱动装置22112的转轴与第一滑动架22113形成丝杆连接,第一滑动架22113与安装架22111滑动连接,第二驱动装置22114固定连接于第一滑动架22113的一端,第二驱动装置22114的转轴与第二滑动架22115形成丝杆连接,第二滑动架22115与第一滑动架22113滑动连接,摄像机2212、带光源棱镜2213均固定连接于第二滑动架22115的一侧。
44.在本实施方式中:
45.相机模组221共有2个,获取图形的拍摄口以水平面而言呈对角设置,用于从两个角度来获取丝印平台12上的柔性电路板的图像信息;
46.两轴驱动组件2211用于带动摄像机2212、带光源棱镜2213进行小范围的移动;
47.安装架22111用于为第一驱动装置22112提供一个稳固的安装结构;
48.第一驱动装置22112为步进电机,用于带动第一滑动架22113进行滑动;
49.第一滑动架22113用于为第二驱动装置22114提供一个稳固的安装结构,同时也为第二滑动架22115提供一个滑动的支撑结构;
50.第二驱动装置22114为步进电机,用于带动第二滑动架22115进行滑动;
51.第二滑动架22115用于为摄像机2212、带光源棱镜2213提供一个稳固的安装结构;
52.摄像机2212用于获取图像信息;
53.带光源棱镜2213用于将图像折射90度送至摄像机2212的镜头中;
54.固定架222用于为两个相机模组221提供一个稳固的固定结构;
55.具体的,在摄像机2212对丝印平台12上的图像进行获取时,两轴驱动组件2211则会带动摄像机2212、带光源棱镜2213进行小范围的x、y轴移动,使得带光源棱镜2213处于最佳的获取位置,有利于摄像机2212的对焦。
56.进一步的,卸料机械手23包括第一升降气缸231、吸附机械手232,第一升降气缸231与丝印机1电连接,第一升降气缸231固定连接于一个运动支撑臂211上并位于影像获取机构22的一侧,吸附机械手232固定连接于第一升降气缸231的推杆上并朝向下方;吸附机械手232包括支撑板2321、多个吸嘴2322,支撑板2321的中部与第一升降气缸231的推杆固定连接,多个吸嘴2322分别贯穿设置于支撑板2321上并朝向下方。
57.在本实施方式中:
58.第一升降气缸231用于带动吸附机械手232进行升降运动;
59.吸附机械手232用于将丝印平台12上已经丝印完成的柔性电路板进行吸附搬移;
60.支撑板2321用于为多个吸嘴2322提供一个稳固的支撑结构;
61.吸嘴2322与外部的真空泵连接,用于吸附柔性电路板;
62.具体的,在丝印平台12上的柔性电路板丝印完毕后,第一升降气缸231带动吸附机械手232下降至柔性电路板的表面,在吸附机械手232上的吸嘴2322与柔性电路板接触后,外部真空泵启动,吸嘴2322将柔性电路板吸附,第一升降气缸231带动吸附机械手232上升,然后运动支撑臂211带动卸料机械手23向外移动。
63.进一步的,对位上下料机构2还包括清洁组件25,清洁组件25与一个运动支撑臂211固定连接并位于上料机械手24的一侧;清洁组件25包括支撑架251、第二升降气缸252、清洁滚筒253,第二升降气缸252与丝印机1电连接,第二升降气缸252与一个运动支撑臂211固定连接并位于上料机械手24的一侧,支撑架251的中部与第二升降气缸252的推杆固定连接,清洁滚筒253转动连接于支撑架251内并延伸出支撑架251下方。
64.在本实施方式中:
65.清洁组件25用于对丝印平台12进行清洁;
66.支撑架251用于为清洁滚筒253提供一个稳固的安装结构;
67.第二升降气缸252用于带动支撑架251进行升降运动;
68.清洁滚筒253用于清洁丝印平台12的上表面;
69.具体的,在上料机械手24将柔性电路板吸附并搬运至丝印平台12后准备复位时,第二升降气缸252带动支撑架251下降,此时清洁滚筒253与丝印平台12的上表面接触,在上料机械手24复位时,清洁滚筒253则在丝印平台12的上表面滚动,将丝印平台12的上表面的灰尘清除。
70.进一步的,丝印平台12下方设有用于摆正的两个自动对位模组121,两个自动对位模组121均与丝印机1电连接,两个自动对位模组121的移动端分别与丝印平台12的底部进行转动连接,两个自动对位模组121相互垂直设置。
71.在本实施方式中:
72.自动对位模组121共有2个,为现有技术,用于调节丝印平台12的横向转动角度,自
动对位模组121能够根据丝印机1所下达的调节指令来调节丝印平台12的横向转动角度,进而达到为柔性电路板对位的功能。
73.当然,本实用新型还可有其它多种实施方式,基于本实施方式,本领域的普通技术人员在没有做出任何创造性劳动的前提下所获得其他实施方式,都属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1