一种UV灯定位方法与流程
本发明属于uv平板打印,具体涉及一种uv灯定位方法。
背景技术:
1、uv平板打印是压电式喷墨打印的一种,也称为紫外线固化打印,打印的干燥原理是通过led冷光源灯发出的紫外线波与uv墨水中的光敏固化剂起反应,造成uv墨水中的颜料分子固化在材质表面上,从而完成打印动作,由于具有即打即干的优点,广泛应用于广告印刷、灯箱布、交通电力标识牌以及展牌展板的印刷。
2、常见的uv打印工作分为喷墨和灯照两个部分,在进行uv平板打印时,通常需要对uv打印设备进行初始位置参数设定,对喷墨端口进行定位,从而定位图像位置。
3、uv打印小车是uv平板打印的常见uv打印设备,与传统的uv打印机相比,具有打印范围大、自动化程度高的优点,一般的uv打印小车主要由车体、始端喷口、末端喷口以及一组uv灯几部分组成,一组uv灯布设在始端喷口和末端喷口的两侧,由于uv灯与喷口之间存在一段距离,这样就使得uv灯的开启和关闭时机需要进行独立设定,从而保证uv平板打印的效果。
4、现有技术中的uv平板打印过程中主要采用手动测量uv灯与喷口间距,从而根据测量间距对uv打印小车进行初始位置参数设定,然而,由于喷口通常设置在uv打印小车的下方,手动测量较为不便,同时,由于手动测量的误差较大,这样就使得uv平板打印过程中uv灯的定位精确性较差,从而使得uv平板打印过程中容易出现图像偏位的情况。
5、因此,针对上述技术问题,有必要提供一种uv灯定位方法。
技术实现思路
1、本发明的目的在于提供一种uv灯定位方法,以解决上述uv平板打印过程中uv灯的定位精确性较差的问题。
2、为了实现上述目的,本发明一实施例提供的技术方案如下:
3、一种uv灯定位方法,所述uv灯包括第一uv光源,所述第一uv光源的一侧设有第二uv光源,所述第一uv光源与第二uv光源之间连接有uv打印小车,所述uv打印小车上连接有始端喷嘴和末端喷嘴,所述第一uv光源远离始端喷嘴的一侧设有打印产品,所述第一uv光源贴近打印产品的一侧连接有多个第一光栅传感器,所述始端喷嘴贴近打印产品的一侧设有多个第二光栅传感器。
4、所述定位方法包括以下步骤:
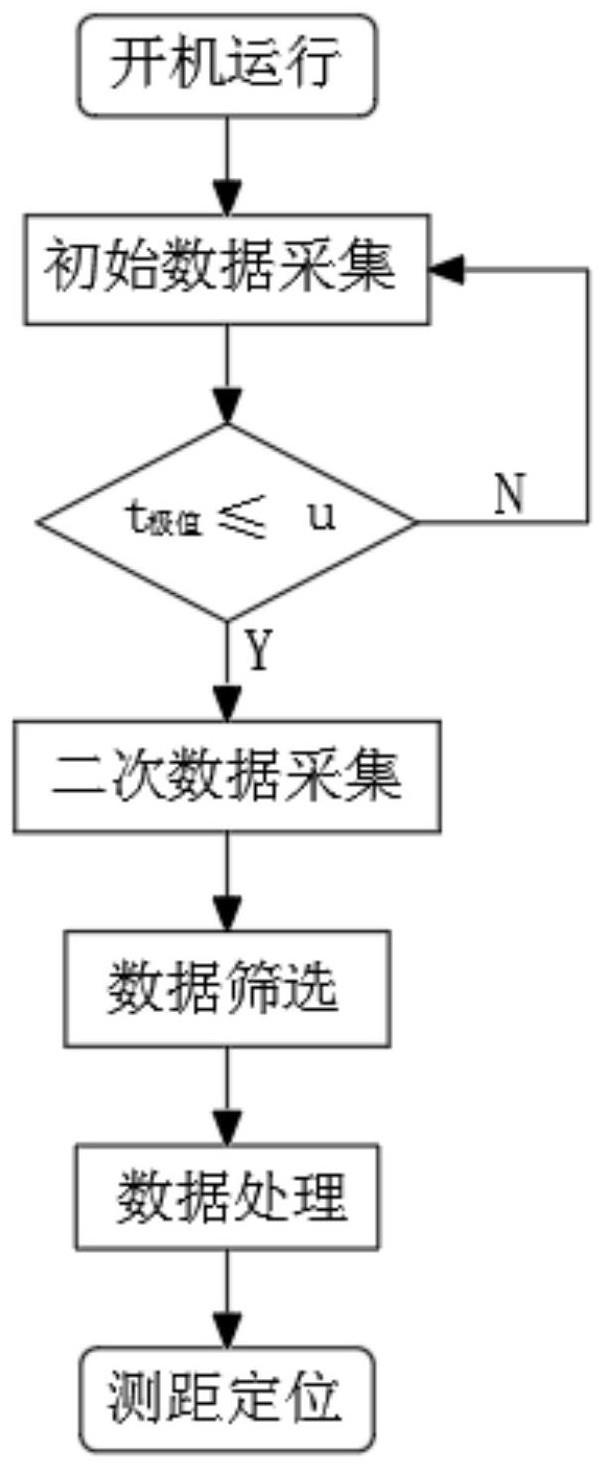
5、s1、开机运行,将打印产品放置在uv打印位置,并将uv打印小车移动至uv打印位置,将uv打印小车开机使得uv打印小车以速度v匀速向打印产品进行移动;
6、s2、初始数据采集,通过多组第一光栅传感器对第一uv光源的移动状态进行检测,当第一uv光源移动至与打印产品接触的位置时,记录多组第一光栅传感器采集到的数据,并将采集到的多组数据标记为t1、t2、t3、t…;
7、s3、二次数据采集,通过多组第二光栅传感器对始端喷嘴的移动状态进行检测,当始端喷嘴移动至与打印产品接触的位置时,记录多组第二光栅传感器采集到的数据,并将采集到的多组数据标记为t1、t2、t3、t…;
8、s4、数据处理,采用平均算法分别对t1、t2、t3、t…和t1、t2、t3、t…得到平均值t平和t平;
9、s5、测距定位,根据测距公式s=(t平-t平)v,可得第一uv光源与始端喷嘴的间距,随后,可根据间距s对第一uv光源进行打印前定位。
10、进一步地,所述uv打印小车的下方连接有车座,所述车座的下方连接有多个均匀分布的驱动行走轮,所述第一光栅传感器与第二光栅传感器的数量为3~6个。
11、进一步地,所述uv打印位置与uv打印小车的运动方向相平行,所述速度v为已知常数。
12、进一步地,所述初始数据采集完成后根据数据的极值差与误差阀值u相比较的方式判断多组数据t1、t2、t3、t…的可用性。
13、进一步地,所述极值差的计算公式为:t极值=tmax-tmin,所述t极值>u时,舍弃多组数据t1、t2、t3、t…并重新进行初始数据采集,所述t极值≤u时,采用多组数据t1、t2、t3、t…并进行二次数据采集。
14、进一步地,所述数据处理前采用误差筛选法分别对t1、t2、t3、t…和t1、t2、t3、进行数据筛选。
15、进一步地,所述误差筛选法为选取多组数据的中间值t中、t中,并跟据筛选阀值k确定误差筛选范围。
16、进一步地,所述误差筛选范围选取公式为:t筛=t中±k、t筛=t中±k。
17、与现有技术相比,本发明具有以下优点:
18、本发明通过采用光栅传感器检测的方式对uv光源进行自动检测与间距测量,显著提高了在uv打印前对uv光源进行定位的准确性,大大降低了由于人工测量误差导致uv打印图像偏位的情况,提高了对uv光源进行定位的快速性与准确性。
技术特征:
1.一种uv灯定位方法,其特征在于,所述uv灯包括第一uv光源(1),所述第一uv光源(1)的一侧设有第二uv光源(2),所述第一uv光源(1)与第二uv光源(2)之间连接有uv打印小车(3),所述uv打印小车(3)上连接有始端喷嘴(4)和末端喷嘴(5),所述第一uv光源(1)远离始端喷嘴(4)的一侧设有打印产品(6),所述第一uv光源(1)贴近打印产品(6)的一侧连接有多个第一光栅传感器(7),所述始端喷嘴(4)贴近打印产品(6)的一侧设有多个第二光栅传感器(8);
2.根据权利要求1所述的一种uv灯定位方法,其特征在于,所述uv打印小车(3)的下方连接有车座(9),所述车座(9)的下方连接有多个均匀分布的驱动行走轮(10),所述第一光栅传感器(7)与第二光栅传感器(8)的数量为3~6个。
3.根据权利要求1所述的一种uv灯定位方法,其特征在于,所述uv打印位置与uv打印小车(3)的运动方向相平行,所述速度v为已知常数。
4.根据权利要求1所述的一种uv灯定位方法,其特征在于,所述初始数据采集完成后根据数据的极值差与误差阀值u相比较的方式判断多组数据t1、t2、t3、t…的可用性。
5.根据权利要求4所述的一种uv灯定位方法,其特征在于,所述极值差的计算公式为:t极值=tmax-tmin,所述t极值>u时,舍弃多组数据t1、t2、t3、t…并重新进行初始数据采集,所述t极值≤u时,采用多组数据t1、t2、t3、t…并进行二次数据采集。
6.根据权利要求1所述的一种uv灯定位方法,其特征在于,所述数据处理前采用误差筛选法分别对t1、t2、t3和t1、t2、t3进行数据筛选。
7.根据权利要求6所述的一种uv灯定位方法,其特征在于,所述误差筛选法为选取多组数据的中间值t中、t中,并跟据筛选阀值k确定误差筛选范围。
8.根据权利要求7所述的一种uv灯定位方法,其特征在于,所述误差筛选范围选取公式为:
技术总结
本发明涉及UV平板打印技术领域,公开了一种UV灯定位方法,UV灯包括第一UV光源,第一UV光源的一侧设有第二UV光源,第一UV光源与第二UV光源之间连接有UV打印小车,UV打印小车上连接有始端喷嘴和末端喷嘴,第一UV光源贴近打印产品的一侧连接有多个第一光栅传感器,始端喷嘴贴近打印产品的一侧设有多个第二光栅传感器。定位方法包括以下步骤:S1、开机运行,将打印产品放置在UV打印位置,并将UV打印小车移动至UV打印位置。本发明通过采用光栅传感器检测的方式对UV光源进行自动检测与间距测量,显著提高了在UV打印前对UV光源进行定位的准确性,大大降低了由于人工测量误差导致UV打印图像偏位的情况,提高了对UV光源进行定位的快速性与准确性。
技术研发人员:凌杰强
受保护的技术使用者:苏州市森泓技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!