一种基于协作机器人的飞机航电联调测试装置及其测试方法与流程
[0001]
本发明涉及航电联调技术领域,具体为一种基于协作机器人的飞机航电联调测试装置及其测试方法。
背景技术:
[0002]
飞机机载系统产品种类繁多、生产量较小、装配工况复杂,实现完全自动化的装配作业不仅经济性差,而且技术难度很大。飞机航电系统综合联调联试,是飞机修理线的重要组成之一,对于提前发现部件系统性故障问题,降低飞机总装调试周期,具有重要作用。
[0003]
目前,航电联调航空维修现场进行系统联调联试作业时,由位于模拟座舱的操作者按照调试工艺设置模拟座舱各个操作台的指令开关,并观察显示器参数是否符合工艺要求,整个过程人工介入程度高,且操作动作单一,存在操作强度大,联调联试时间长,检测过程不可追溯等问题。鉴于此,我们提出一种基于协作机器人的飞机航电联调测试装置及其测试方法。
技术实现要素:
[0004]
本发明的目的在于提供一种基于协作机器人的飞机航电联调测试装置及其测试方法,以解决上述背景技术中提出的问题。
[0005]
为实现上述目的,本发明提供如下技术方案:
[0006]
一种基于协作机器人的飞机航电联调测试装置,所述测试装置包括:协作机器人、工控机、高线程激光雷达、双目视觉传感器和工装夹具组件;
[0007]
所述工控机设置在所述协作机器人内;
[0008]
所述高线程激光雷达、双目视觉传感器均安装在所述协作机器人上;
[0009]
所述协作机器人的两侧均安装有六轴机器臂;
[0010]
所述工装夹具组件安装在所述六轴机器臂的末端,包括:六自由度力传感器、深度tof相机和机械爪;
[0011]
所述高线程激光雷达、双目视觉传感器、六轴机器臂、六自由度力传感器、深度tof相机、机械爪均与所述工控机通讯连接;
[0012]
所述工控机通过所述高线程激光雷达和双目视觉传感器对飞机座舱内的航电设备进行一次识别和边缘计算,确定被测目标的位置,并制定路径规划和测试策略;
[0013]
所述工控机控制所述六轴机器臂和机械爪对航电设备进行操作调试;
[0014]
所述六自由度力传感器用于向工控机反馈所述机械爪当前的夹持力度,所述工控机根据反馈情况判断是否需要调节所述机械爪当前的夹持力度;
[0015]
所述tof深度相机用于对航电设备进行二次识别和边缘计算。
[0016]
优选的,所述测试装置还包括移动小车,所述移动小车用于装载所述协作机器人在飞机座舱内移动。
[0017]
优选的,所述机械爪的内侧设置有用于减震缓冲的柔性件。
[0018]
优选的,所述航电设备包括但不限于飞机座舱内的拨动开关、转动开关、驾驶杆、油门杆。
[0019]
本发明还提供一种测试方法,用于所述的测试装置对飞机座舱进行测试,包括以下步骤:
[0020]
步骤a:数据采集,
[0021]
a1:通过高线程激光雷达采集协作机器人周围环境的精密点云数据;
[0022]
a2:利用精密点云数据进行建模,并识别周围环境情况,以及航电导光板情况,对飞机座舱内的航电设备进行测试;
[0023]
步骤b:前景检测,
[0024]
b1:通过双目视觉传感器对飞机座舱内的情况进行扫描,采集并储存视觉数据;
[0025]
b2:利用防抖算法对视觉数据进行防抖处理;
[0026]
b3:通过工控机对视觉数据进行前景检测,并通过图像处理技术得到当前座舱内航电设备的状态;
[0027]
步骤c:通过机械臂对航电设备进行操作,并利用激光雷达和双目视觉传感器监控当前机械臂工作状态,以及被测目标状态;
[0028]
步骤d:利用步骤b中存储的视觉数据与航电设备当前状态进行对比和判断,从而判定航电设备的运行状态,实现预报警、记录显示和定位跟踪功能。
[0029]
优选的,步骤c中,利用复现算法对航电设备的遮挡部分进行复现,确保当前检测可靠性和安全性。
[0030]
与现有技术相比,本发明的有益效果是:该基于协作机器人的飞机航电联调测试装置及其测试方法,通过工控机对操作步骤进行程序编写和时序控制,利用协作机器人代替技术员在模拟座舱内进行地面航电联调仿真操作,通过机器视觉进行数据采集、判断、识别和定位,利用算法对当前状态进行判别后存储判断结果,提供相应检测报告,实现航电系统联调联试作业的自动化联调联试,减少人工介入,降低操作人员的工作强度,提高联调联试效率,且检测过程可追溯,便于使用。
附图说明
[0031]
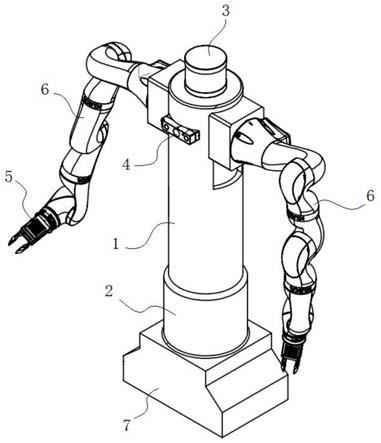
图1为本发明实施例1的整体结构示意图;
[0032]
图2为本发明实施例1中工装夹具组件的结构示意图;
[0033]
图3为本发明实施例2的整体方法流程图。
[0034]
图中:1、协作机器人;2、工控机;3、高线程激光雷达;4、双目视觉传感器;5、工装夹具组件;51、六自由度力传感器;52、深度tof相机;53、机械爪;531、柔性件;6、六轴机器臂;7、移动小车。
具体实施方式
[0035]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0036]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0037]
在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
[0038]
实施例1
[0039]
如图1和图2所示,一种基于协作机器人的飞机航电联调测试装置,测试装置包括:协作机器人1、工控机2、高线程激光雷达3、双目视觉传感器4和工装夹具组件5;
[0040]
工控机2设置在协作机器人1内;
[0041]
高线程激光雷达3、双目视觉传感器4均安装在协作机器人1上;
[0042]
协作机器人1的两侧均安装有六轴机器臂6;
[0043]
工装夹具组件5安装在六轴机器臂6的末端,包括:六自由度力传感器51、深度tof相机52和机械爪53;
[0044]
高线程激光雷达3、双目视觉传感器4、六轴机器臂6、六自由度力传感器51、深度tof相机52、机械爪53均与工控机2通讯连接;
[0045]
工控机2通过高线程激光雷达3和双目视觉传感器4对飞机座舱内的航电设备进行一次识别和边缘计算,确定被测目标的位置,并制定路径规划和测试策略;
[0046]
工控机2控制六轴机器臂6和机械爪53对航电设备进行操作调试;
[0047]
六自由度力传感器51用于向工控机2反馈机械爪53当前的夹持力度,工控机2根据反馈情况判断是否需要调节机械爪53当前的夹持力度;
[0048]
tof深度相机52用于对航电设备进行二次识别和边缘计算。
[0049]
进一步的,测试装置还包括移动小车7,移动小车7用于装载协作机器人1在飞机座舱内移动。
[0050]
值得说明的是,机械爪53的内侧设置有用于减震缓冲的柔性件531。
[0051]
具体的,航电设备包括但不限于飞机座舱内的拨动开关、转动开关、驾驶杆、油门杆。
[0052]
本实施例中,通过工控机2对操作步骤进行程序编写和时序控制,利用协作机器人1代替技术员在模拟座舱内进行地面航电联调仿真操作,通过双目视觉传感器4进行数据采集、判断、识别和定位,利用工控机2对当前状态进行判别后存储判断结果,提供相应检测报告,实现航电系统联调联试作业的自动化联调联试,减少人工介入,降低操作人员的工作强度,提高联调联试效率,且检测过程可追溯,便于使用。
[0053]
实施例2
[0054]
如图3所示,一种测试方法,用于所述的测试装置对飞机座舱进行测试,包括以下步骤:
[0055]
步骤a:数据采集,
[0056]
a1:通过高线程激光雷达采集协作机器人周围环境的精密点云数据;
[0057]
a2:利用精密点云数据进行建模,并识别周围环境情况,以及航电导光板情况,对飞机座舱内的航电设备进行测试;
[0058]
步骤b:前景检测,
[0059]
b1:通过双目视觉传感器对飞机座舱内的情况进行扫描,采集并储存视觉数据;
[0060]
b2:利用防抖算法对视觉数据进行防抖处理;
[0061]
b3:通过工控机对视觉数据进行前景检测,并通过图像处理技术得到当前座舱内航电设备的状态;
[0062]
步骤c:通过机械臂对航电设备进行操作,并利用激光雷达和双目视觉传感器监控当前机械臂工作状态,以及被测目标状态;
[0063]
步骤d:利用步骤b中存储的视觉数据与航电设备当前状态进行对比和判断,从而判定航电设备的运行状态,实现预报警、记录显示和定位跟踪功能。
[0064]
值得说明的是,步骤c中,利用复现算法对航电设备的遮挡部分进行复现,确保当前检测可靠性和安全性。
[0065]
通过上述内容不难看出,相比于传统的人工测试方法,本测试方法与实施例1所述的测试装置配套使用,测试准确性更高,可以明显减少人为差错,提高检测效果。
[0066]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1