一种机器人实训装置的制作方法
[0001]
本实用新型属于教学实训技术领域,具体是指一种机器人实训装置。
背景技术:
[0002]
随着工业技术智能化的飞速发展,适用于工业生产的机器人越来越多,更多的劳动岗位由机器人胜任,面临飞速发展的机器人,越来越的学校开设了机器人实训课程,普通的实训用机器人功能单一,不能多样化教学,内部机构封闭,不容易观察动作原理,很多功能被简化,动手实训空间小,学生无法理解工作原理,很难激起学生学习机器人知识的欲望,所以急需一种新型机器人实训装置解决上述难题。
技术实现要素:
[0003]
为解决上述现有难题,本实用新型提供了一种夹持机械手实现抓紧与释放物料便于演示机械手的基本动作,机械臂固定角度范围旋转,下料筒控制下料便于演示工业生产下料流程,传送带传送物料,便于学生观察物料运输过程,推动气缸推动物料到物料台便于学生理解工业生产自动化流程的机器人实训装置。
[0004]
本实用新型采取的技术方案如下:本实用新型一种机器人实训装置,包括实训台、下料机构、夹持机构和运输机构,所述下料机构设于实训台上方,所述下料机构包括下料台和下料筒,所述下料台设于实训台上方,所述下料台内设有压力传感器,压力传感器便于检测下料台上有无物料,所述下料筒设于下料台正上方,所述下料筒为上下贯穿的中空圆柱腔体,所述下料筒下部对称设有抱紧气缸,所述抱紧气缸贯穿下料筒侧壁,抱紧气缸便于对下料筒内物料进行固定防止物料滑落出下料筒,便于物料分批下滑,所述下料筒下方对称设有下料气缸,下料气缸便于控制释放下料筒内部分物料到下料台,所述夹持机构设于实训台上方,所述夹持机构设于下料机构一侧,所述夹持机构包括机械手、机械臂和旋转电机,所述旋转电机设于实训台上,所述机械臂与旋转电机相连,所述机械手设于机械臂远离旋转电机一端,所述机械臂包括夹持腔、夹持气缸、固定臂和连接帽,所述夹持腔设于机械臂靠近机械手一端,所述夹持气缸设于夹持腔一侧,所述固定臂设于夹持气缸一侧,所述连接帽设于固定臂一侧,所述旋转电机的输出轴转动设于连接帽内,所述夹持气缸内设有夹持活塞杆,所述夹持活塞杆贯通夹持气缸一端侧壁且滑动设于夹持气缸内,所述夹持气缸侧壁设有夹持气孔和释放气孔,所述夹持气孔设于夹持气缸侧壁远离释放气孔的一端,所述夹持活塞杆一端铰接设有连接板,所述连接板设于夹持腔内,所述机械手铰接设于夹持腔远离夹持气缸的一端侧壁,所述机械手与连接板之间铰接设有夹持板,通过夹持活塞杆一伸出或伸入夹持杆筒带动连接板沿夹持腔前后移动,连接板通过夹持板拉动机械手闭合或推动机械手打开,机械手便于夹紧和释放物料,旋转电机便于带动机械臂和机械手在固定角度内旋转,所述运输机构设于实训台上方,所述运输机构设于夹持机构一侧,所述运输机构包括固定台、传送电机、主动滑轮、从动滑轮、传送带、推动气缸和物料台,所述固定台设于实训台上方,所述传送电机设于固定台上方,所述传送电机的输出轴上设有主动滑轮,
所述从动滑轮平行于主动滑轮且转动设于固定台侧壁,所述传送带绕设于主动滑轮与从动滑轮侧壁,传送电机工作带动主动滑轮转动,在传送带的作用下从动滑轮转动,使传送带开始传动工作,所述推动气缸设于传送电机上方,所述物料台设于实训台上,所述物料台与推动气缸对称设于传送带两侧,物料台便于接住推动气缸推动的传送带上的物料。
[0005]
进一步地,所述抱紧气缸内设有抱紧活塞杆,所述抱紧活塞杆贯通抱紧气缸一端侧壁且滑动设于抱紧气缸内,所述抱紧气缸侧壁设有抱紧气孔和松放气孔,所述抱紧气孔设于抱紧气缸侧壁远离松放气孔的一端,所述下料气缸内设有下料活塞杆,所述下料活塞杆贯通下料气缸一端侧壁且滑动设于下料气缸内,所述下料气缸侧壁设有下料气孔和保持气孔,所述下料气孔设于下料气缸侧壁远离保持气孔的一端,所述推动气缸内设有推动活塞杆,所述推动活塞杆贯通推动气缸一端侧壁且滑动设于推动气缸内,所述推动气缸侧壁设有推动气孔,所述推动活塞杆与推动气缸侧壁之间设有复位弹簧,所述复位弹簧设于推动气缸内,推送气缸便于推动物料到物料台上。
[0006]
进一步地,所述旋转电机的输出轴设有外螺纹,所述连接帽设有内螺纹,所述旋转电机的输出轴上的外螺纹与连接帽上的内螺纹啮合。
[0007]
进一步地,所述实训台下方设有plc控制器和压缩气罐,所述压缩气罐输出端设有通气管,压缩气罐便于为各个气缸供气实现气缸的往复运动。
[0008]
进一步地,所述实训台上设有电磁阀排和启动开关,所述电磁阀排包括电磁阀一、电磁阀二、电磁阀三、电磁阀四、电磁阀五、电磁阀六、电磁阀七,所述电磁阀排通过通气管与压缩气罐相连,所述电磁阀排输出端设有多根充气软管,多根充气软管远离电磁阀的一端分别连通设于抱紧气孔、松放气孔、下料气孔、保持气孔、夹持气孔、释放气孔、推动气孔处,所述电磁阀一设于压缩气罐与保持气孔之间,所述电磁阀二设于压缩气罐与松放气孔之间,所述电磁阀三设于压缩气罐与下料气孔之间,所述电磁阀四设于压缩气罐与抱紧气孔之间,所述电磁阀五设于压缩气罐与释放气孔之间,所述电磁阀六设于压缩气罐与夹持气孔之间,所述电磁阀七设于压缩气罐与推动气孔之间。
[0009]
进一步地,所述推动气缸靠近运输机构一侧设有光栅传感器,所述物料台一侧设有光栅接受板,所述光栅接受板与光栅传感器对称设于传送带两侧,光栅传感器与光栅接受板配合使用检测有无物料运动至推动气缸附近。
[0010]
进一步地,所述旋转电机为步进电机,步进电机运动角度和步数便于控制。
[0011]
采用上述结构本实用新型取得的有益效果如下:本方案一种机器人实训装置抱紧气缸抱紧物料便于控制下料个数,下料气缸控制下料,便于展示工业生产在的下流流程,压力传感器便于检测下料台上有无物料,旋转电机运动步数可控使得机械臂旋转角度可控,机械手便于抓紧与释放物料,便于学生观察机械手工作过程,机械臂旋转带动机械手运动在下料机构和运输机构之间,便于演示机械臂运输物料过程,传送带运输物料,光栅接收板配合光栅传感器工作便于光栅光感器检测有无物料运输至推动气缸处,推动气缸将传送带上的物料推动到物料台上,便于学生系统观察工业生产中机器人的每一个动作。
附图说明
[0012]
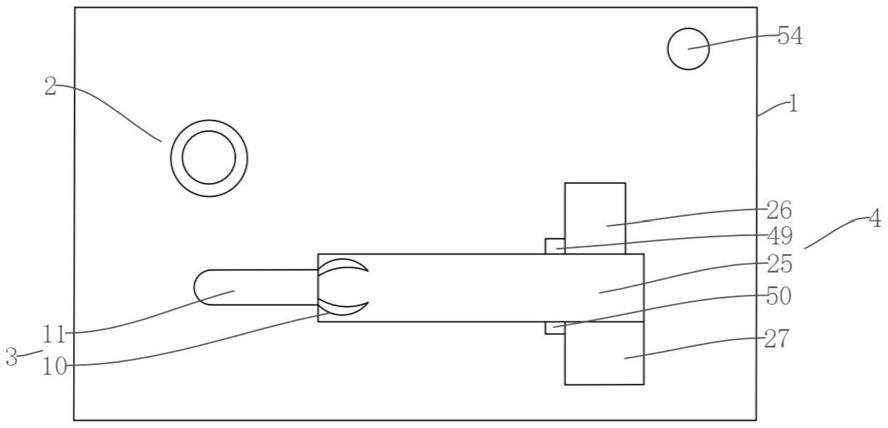
图1为本实用新型一种机器人实训装置俯视图;
[0013]
图2为本实用新型一种机器人实训装置主视图;
[0014]
图3为本实用新型一种机器人实训装置下料机构结构示意图;
[0015]
图4为本实用新型一种机器人实训装置夹持机构主视图;
[0016]
图5为本实用新型一种机器人实训装置夹持机构内部结构示意图;
[0017]
图6为本实用新型一种机器人实训装置运输机构结构主视图;
[0018]
图7为本实用新型一种机器人实训装置运输机构内部结构示意图。
[0019]
其中,1、实训台,2、下料机构,3、夹持机构,4、运输机构,5、下料台,6、下料筒,7、压力传感器,8、抱紧气缸,9、下料气缸,10、机械手,11、机械臂,12、旋转电机,13、夹持腔,14、夹持气缸,15、固定臂,16、连接帽,17、夹持活塞杆,18、夹持气孔,19、释放气孔,20、连接板,21、固定台,22、传送电机,23、主动滑轮,24、从动滑轮,25、传送带,26、推动气缸,27、物料台,28、抱紧活塞杆,29、抱紧气孔,30、松放气孔,31、下料活塞杆,32、下料气孔,33、保持气孔,34、推动活塞杆,35、推动气孔,36、复位弹簧,37、plc控制器,38、压缩气罐,39、通气管,40、电磁阀排,41、电磁阀一,42、电磁阀二,43、电磁阀三,44、电磁阀四,45、电磁阀五,46、电磁阀六,47、电磁阀七,48、充气软管,49、光栅传感器,50、光栅接受板,51夹持板,52外螺纹,53内螺纹,54、启动开关。
具体实施方式
[0020]
下面结合具体实施对本专利的技术方案作进一步详细地说明,本实用新型所述的技术特征或连接关系没有进行详细描述的部分均为采用的现有技术。
[0021]
以下结合附图,对本实用新型做进一步详细说明。
[0022]
如图1-7所示,本实用新型一种机器人实训装置,包括实训台1、下料机构2、夹持机构3和运输机构4,所述下料机构2设于实训台1上方,所述下料机构2包括下料台5和下料筒6,所述下料台5设于实训台1上方,所述下料台5内设有压力传感器7,所述下料筒6设于下料台5正上方,所述下料筒6为上下贯穿的中空圆柱腔体,所述下料筒6下方对称设有下料气缸9,所述夹持机构3设于实训台1上方,所述夹持机构3设于下料机构2一侧,所述夹持机构3包括机械手10、机械臂11和旋转电机12,所述旋转电机12设于实训台1上,所述机械臂11与旋转电机12相连,所述机械手10设于机械臂11远离旋转电机12一端,所述机械臂11包括夹持腔13、夹持气缸14、固定臂15和连接帽16,所述夹持腔13设于机械臂11靠近机械手10一端,所述夹持气缸14设于夹持腔13一侧,所述固定臂15设于夹持气缸14一侧,所述连接帽16设于固定臂15一侧,所述旋转电机12的输出轴转动设于连接帽16内,所述夹持气缸14内设有夹持活塞杆17,所述夹持活塞杆17贯通夹持气缸14一端侧壁且滑动设于夹持气缸14内,所述夹持气缸14侧壁设有夹持气孔18和释放气孔19,所述夹持气孔18设于夹持气缸14侧壁远离释放气孔19的一端,所述夹持活塞杆17一端铰接设有连接板20,所述连接板20设于夹持腔13内,所述机械手10铰接设于夹持腔13远离夹持气缸14的一端侧壁,所述机械手10与连接板20之间铰接设有夹持板51,所述运输机构4设于实训台1上方,所述运输机构4设于夹持机构3一侧,所述运输机构4包括固定台21、传送电机22、主动滑轮23、从动滑轮24、传送带25、推动气缸26和物料台27,所述固定台21设于实训台1上方,所述传送电机22设于固定台21上方,所述传送电机22的输出轴上设有主动滑轮23,所述从动滑轮24平行于主动滑轮23且转动设于固定台21侧壁,所述传送带25绕设于主动滑轮23与从动滑轮24侧壁,所述推动气缸26设于传送电机22上方,所述物料台27设于实训台1上,所述物料台27与推动气缸26对
称设于传送带25两侧。
[0023]
其中,所述下料筒6下部对称设有抱紧气缸8,所述抱紧气缸8贯穿下料筒6侧壁,所述抱紧气缸8内设有抱紧活塞杆28,所述抱紧活塞杆28贯通抱紧气缸8一端侧壁且滑动设于抱紧气缸8内,所述抱紧气缸8侧壁设有抱紧气孔29和松放气孔30,所述抱紧气孔29设于抱紧气缸8侧壁远离松放气孔30的一端,所述下料气缸9内设有下料活塞杆31,所述下料活塞杆31贯通下料气缸9一端侧壁且滑动设于下料气缸9内,所述下料气缸9侧壁设有下料气孔32和保持气孔33,所述下料气孔32设于下料气缸9侧壁远离保持气孔33的一端,所述推动气缸26内设有推动活塞杆34,所述推动活塞杆34贯通推动气缸26一端侧壁且滑动设于推动气缸26内,所述推动气缸26侧壁设有推动气孔35,所述推动活塞杆34与推动气缸26侧壁之间设有复位弹簧36,所述复位弹簧36设于推动气缸26内,所述旋转电机12的输出轴设有外螺纹52,所述连接帽16设有内螺纹53,所述旋转电机12的输出轴上的外螺纹52与连接帽16上的内螺纹53啮合,所述实训台1下方设有plc控制器37和压缩气罐38,所述压缩气罐38输出端设有通气管39,所述实训台1上设有电磁阀排40和启动开关54,所述电磁阀排40包括电磁阀一41、电磁阀二42、电磁阀三43、电磁阀四44、电磁阀五45、电磁阀六46、电磁阀七47,所述电磁阀排40通过通气管39与压缩气罐38相连,所述电磁阀排40输出端设有多根充气软管48,所述电磁阀一41设于压缩气罐38与保持气孔33之间,所述电磁阀二42设于压缩气罐38与松放气孔30之间,所述电磁阀三43设于压缩气罐38与下料气孔32之间,所述电磁阀四44设于压缩气罐38与抱紧气孔29之间,所述电磁阀五45设于压缩气罐38与释放气孔19之间,所述电磁阀六46设于压缩气罐38与夹持气孔18之间,所述电磁阀七47设于压缩气罐38与推动气孔35之间,所述推动气缸26靠近运输机构4的一侧设有光栅传感器49,所述物料台27一侧设有光栅接受板50,所述光栅接受板50与光栅传感器49对称设于传送带25两侧,所述旋转电机12为步进电机。
[0024]
具体使用时,通过电脑输入正确的plc控制器37编程,对plc控制器37进行正确的接线,按下启动开关54,此时plc控制器37控制电磁阀一41打开,压缩气罐38内的气体由保持气孔33进入到下料气缸9内,下料活塞杆31伸出下料气缸9,便于防止物料脱离下料筒6,同时控制电磁阀二42打开压缩气罐38,压缩气罐38内的气体由松放气孔30进入到抱紧气缸8内,抱紧活塞杆28缩回抱紧气缸8,便于物料下落,将物料放入下料筒6中,通过电脑发送开始工作指令,plc控制器37控制电磁阀三43打开,压缩气罐38内的气体由下料气孔32进入到下料气缸9内,下料气缸9内原来的气体由保持气孔33排出,下料活塞杆31被推回下料气缸9内,便于释放下料筒6内物料,同时电磁阀四44打开,压缩气罐38内的气体由抱紧气孔29进入抱紧气缸8内,抱紧气缸8内原来的气体由松放气孔30排出,抱紧活塞杆28伸出抱紧气缸8抱紧物料,被抱紧的物料及上方物料固定在下料筒6内,便于被抱紧物料下方的物料掉出下料筒6,物料掉落在下料台5上,下料台5内的压力传感器7检测到有物料掉落在下料台5上,将信号传递到给plc控制器37,plc控制器37控制电磁阀一41打开,下料活塞杆31伸出下料气缸9防止物料脱离下料筒6,同时plc控制器37控制电磁阀二42打开,抱紧活塞杆28缩回抱紧气缸8内便于物料下滑,plc控制器37控制旋转电机12带动机械臂11由传送带25位置旋转到下料台5位置,在内螺纹53与外螺纹52作用下,机械臂11一边旋转一边下降到下料台5位置,此时plc控制电磁阀五45打开,压缩气罐38内的气体由释放进入夹持气缸14内,夹持活塞杆17缩回夹持气缸14,夹持活塞杆17一端的连接板20带动夹持板51缩回夹持腔13,夹持
板51带动机械手10向夹持腔13内部运动,机械手10一侧铰接设于打开夹持腔13侧壁,无法向运动到夹持腔13内部运动,在夹持板51带动下机械手10抓紧物料,plc控制器37控制旋转电机12带动机械臂11由下料台5位置旋转到传送带25位置,在内螺纹53与外螺纹52作用下,机械臂11一边旋转一边上升至传送带25位置,此时plc控制器37控制电磁阀六46打开,压缩气罐38内的气体由夹持气孔18进入夹持气缸14内,夹持活塞杆17伸出夹持气缸14,夹持活塞杆17一端的连接板20带动夹持板51向夹持腔13外部运动,夹持板51带动机械手10向夹持腔13外部运动,机械手10一侧铰接设于打开夹持腔13侧壁,无法运动到夹持腔13外部运动,在夹持板51带动下机械手10打开释放物料,物料被放置在传送带25上,传送带25将物料运输到传送带25另一端,当物料运输到光栅传感器49处,光栅传感器49感应到有物料,plc控制器37控制电磁阀七47瞬间打开,压缩气罐38内的气体由推动气孔35进入推动气缸26内,推动活塞杆34伸出推动气缸26,推动活塞杆34将物料推到传送带25一侧的物料台27上,电磁阀七47关闭后在复位弹簧36的作用下推动活塞杆34缩回推动气缸26内,当压力传感器7检测到下料台5上无物料时,plc控制器37控制电磁阀三43打开,下料活塞杆31缩回下料气缸9内,同时plc控制器37控制电磁阀四44打开,抱紧活塞杆28伸出抱紧气缸8,便于抱紧物料防止过多的物料掉落到下料台5,以此循环动作。
[0025]
以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1