压水堆核电站控制棒驱动机构模拟培训装置的制作方法
1.本发明属于核电技术领域,具体涉及一种压水堆核电站控制棒驱动机构模拟培训装置。
背景技术:
2.当前核电厂的公众宣传培训主要以静态实物展示,多媒体及展板展示为主体,缺乏实物与人的互动操作感。
3.交互式控制棒驱动机构模拟培训装置能够真实的展示核电厂控制棒驱动机构内部结构及运行原理演示。为核电培训增加了新的手段,提高了公众培训的效果。
技术实现要素:
4.为克服相关技术中存在的问题,提供了一种压水堆核电站控制棒驱动机构模拟培训装置。
5.根据本公开实施例的一方面,提供一种压水堆核电站控制棒驱动机构模拟培训装置,所述压水堆核电站控制棒驱动机构模拟培训装置包括:第一步进电机、第二步进电机、第三步进电机、第一部件、第二部件、第三部件、多个第一抓爪、多个第二抓爪以及控制棒;
6.所述第一步进电机与所述第一部件连接,所述第二步进电机与所述第二部件连接,所述第三步进电机与所述第三部件连接,所述第一部件、第二部件和第三部件由上至下依次排列;
7.所述第一部件、第二部件和第三部件为沿轴向钝角度剖切的柱体,所述第一部件、第二部件和第三部件沿轴向开设通孔,所述控制棒穿过所述第一部件、第二部件和第三部件的通孔,所述第一部件、第二部件和第三部件的轴向钝角度剖切的剖切口能够向外展示所述控制棒;
8.所述多个第一抓爪连接在所述第二部件的下端,用于抓持所述控制棒;
9.所述多个第二抓爪连接在所述第三部件的下端,用于抓持所述控制棒;
10.所述第一抓爪抓持所述控制棒,且所述第二抓爪松开所述控制棒的情况下,所述第二电机能够通过所述第二部件、所述第一抓爪,带动所述控制棒上下运动。
11.在一种可能的实现方式中,各第一抓爪未抓持所述控制棒的情况下,所述第二步进电机带动所述第二部件连同各第一抓爪向上运动第一预设距离后,各第一抓爪卡入所述控制棒的一个凸台的底面,以抓持所述控制棒。
12.在一种可能的实现方式中,各第一抓爪抓持所述控制棒的情况下,所述第二步进电机带动所述第二部件连同各第一抓爪向下运动第一预设距离后,各第一抓爪松开所述控制棒。
13.在一种可能的实现方式中,各第二抓爪未抓持所述控制棒的情况下,所述第三步进电机带动所述第三部件连同各第二抓爪向上运动第一预设距离后,各第二抓爪卡入所述控制棒的一个凸台的底面,以抓持所述控制棒。
14.在一种可能的实现方式中,各第二抓爪抓持所述控制棒的情况下,所述第三步进电机带动所述第三部件连同各第二抓爪向下运动第一预设距离后,各第二抓爪松开所述控制棒。
15.在一种可能的实现方式中,第一部件、第二部件和第三部件采用120度剖切。
16.在一种可能的实现方式中,所述压水堆核电站控制棒驱动机构模拟培训装置还包括:第一连接件;
17.所述第一步进电机通过第一连接件与所述第一部件连接。
18.在一种可能的实现方式中,所述压水堆核电站控制棒驱动机构模拟培训装置还包括:第二连接件;
19.所述第二步进电机通过第二连接件与所述第二部件连接。
20.在一种可能的实现方式中,所述压水堆核电站控制棒驱动机构模拟培训装置还包括:第三连接件;
21.所述第三步进电机通过第三连接件与所述第三部件连接。
22.在一种可能的实现方式中,所述压水堆核电站控制棒驱动机构模拟培训装置还包括:底座:
23.所述第一步进电机、所述第二步进电机和所述第三步进电机连接所述底座上。
24.本公开的有益效果在于:本公开通过步进电机与部件以及抓爪的结构配合,形象逼真展示控制棒驱动机构的内部结构、运行原理及视觉的观看效果,同时考虑机械设计结构的稳定性及安全性,控制棒驱动机构总体结构采用钝角的剖切,有利于参观人员了解压水堆核电站控制棒驱动机构的内部构造。
附图说明
25.图1是根据一示例性实施例示出的一种压水堆核电站控制棒驱动机构模拟培训装置的示意图。
26.图2是根据一示例性实施例示出的一种压水堆核电站控制棒驱动机构模拟培训装置轴向剖面的示意图。
27.图3是根据一示例性实施例示出的一种压水堆核电站控制棒驱动机构模拟培训装置的示意图。
具体实施方式
28.下面结合附图及具体实施例对本发明作进一步详细说明。
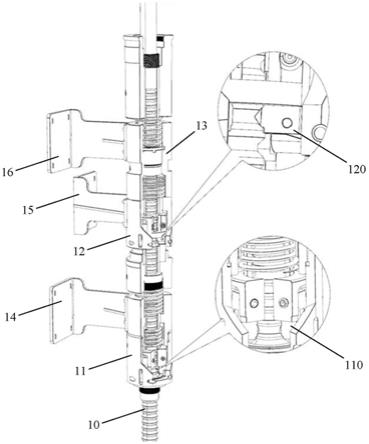
29.图1是根据一示例性实施例示出的一种压水堆核电站控制棒驱动机构模拟培训装置的示意图。图2是根据一示例性实施例示出的一种压水堆核电站控制棒驱动机构模拟培训装置轴向剖面的示意图。如图1和图2所示,该压水堆核电站控制棒驱动机构模拟培训装置可以包括:第一步进电机(图中未示出)、第二步进电机(图中未示出)、第三步进电机(图中未示出)、第一部件13、第二部件12、第三部件11、多个第一抓爪120、多个第二抓爪110、控制棒10、第一连接件16、第二连接件15以及第三连接件14。
30.第一步进电机可以通过第一连接件16与第一部件13连接,第二步进电机可以通过第二连接件15与第二部件12连接,第三步进电机可以通过第三连接件14与第三部件11连
接,第一部件13、第二部件12和第三部件11由上至下依次排列;在本公开中,压水堆核电站控制棒驱动机构模拟培训装置可以为实际场景中压水堆核电站控制棒驱动机构适当比例(例如1:1)的仿制模型,例如,第一部件可以为实际场景中压水堆核电站控制棒驱动机构的移动磁极的仿制件,第二部件可以为实际场景中压水堆核电站控制棒驱动机构的保持磁极的仿制件,第三部件可以为实际场景中压水堆核电站控制棒驱动机构的固定磁极的仿制件,控制棒可以为实际场景中压水堆核电站控制棒驱动机构的控制棒的仿制件。
31.第一部件13、第二部件12和第三部件11为沿轴向钝角度(例如120度)剖切的柱体,第一部件13、第二部件12和第三部件11沿轴向开设通孔,控制棒10穿过第一部件13、第二部件12和第三部件11的通孔,第一部件13、第二部件12和第三部件11的轴向钝角度剖切的剖切口能够向外展示控制棒10;
32.多个第一抓爪120可以通过连接杆连接在第二部件12的下端,各第一抓爪120可以用于抓持控制棒10。多个第二抓爪110连接在第三部件11的下端,各第二抓爪110也可以用于抓持控制棒10。
33.举例来讲,若需要向上移动控制棒,且各第一抓爪未抓持控制棒、各第二抓爪抓持控制棒的情况下,可以控制第二步进电机带动第二部件连同各第一抓爪向上运动第一预设距离(例如8.5毫米),使得各第一抓爪可以向上移动卡入相邻的凸台的底面,以抓持控制棒。可以控制第三步进电机带动第三部件连同各第二抓爪向下运动第一预设距离(例如8.5毫米),使得各第二抓爪向下移动与卡入的凸台相分离,以松开控制棒。接着,可以控制第一步进电机和第二步进电机同时动作,使得第一步进电机带动第一部件向上移动第二预设距离(例如15.9毫米),并使得第二步进电机带动第二部件连同控制棒向上移动第二预设距离(例如15.9毫米)。最后,可控制第三步进电机带动第三部件连同各第二抓爪向上运动第一预设距离(例如8.5毫米),使得各第二抓爪向上移动以卡入相邻近的凸台的底面,以抓持控制棒,并可以控制第二步进电机带动第二部件连同各第一抓爪向下运动第一预设距离(例如8.5毫米),使得各第一抓爪向下以松开控制棒。
34.举例来讲,若需要向下移动控制棒,且各第一抓爪未抓持控制棒、各第二抓爪抓持控制棒的情况下,可以控制第二步进电机带动第二部件连同各第一抓爪向上运动第一预设距离(例如8.5毫米),使得各第一抓爪可以向上移动卡入相邻的凸台的底面,以抓持控制棒。可以控制第三步进电机带动第三部件连同各第二抓爪向下运动第一预设距离(例如8.5毫米),使得各第二抓爪向下移动与卡入的凸台相分离,以松开控制棒。接着,可以控制第一步进电机和第二步进电机同时动作,使得第一步进电机带动第一部件向下移动第二预设距离(例如15.9毫米),并使得第二步进电机带动第二部件连同控制棒向下移动第二预设距离(例如15.9毫米)。最后,可控制第三步进电机带动第三部件连同各第二抓爪向上运动第一预设距离(例如8.5毫米),使得各第二抓爪向上移动以卡入相邻近的凸台的底面,以抓持控制棒,并可以控制第二步进电机带动第二部件连同各第一抓爪向下运动第一预设距离(例如8.5毫米),使得各第一抓爪向下以松开控制棒。
35.图3是根据一示例性实施例示出的一种压水堆核电站控制棒驱动机构模拟培训装置的示意图。如图3所示,压水堆核电站控制棒驱动机构模拟培训装置还可以包括:底座30,第一步进电机(图中未示出)、第二步进电机(图中未示出)和第三步进电机(图中未示出)可以连接底座30上。
36.以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1