一种动物教学仿真模型平台及其操作方法
1.本发明涉及教学平台技术领域,特别涉及一种动物教学仿真模型平台及其操作方法。
背景技术:
2.随着兽医行业行业的发展,学习兽医专业的学生也逐渐增多,在日常教学过程中采用活体动物教学具有不确定性,可能会被动物误伤,而且观察的也不全面,故往往采用仿真模型来进行教学,在进行教学时会使用到教学平台。
3.目前,现有的动物教学仿真模型平台进行仿真教学时,通常存在以下不足:1、现有的动物教学仿真模型平台通常采用人工的方式把持平台,增加了教学者手动支撑的操作,从而降低了教学展示的稳定性,增加了教学者体能的消耗;2、现有的动物教学仿真模型平台通常对仿真犬进行固定连接,不能对仿真犬进行换边处理,教学者教学的知识固定,并且不利于观察者的观察,降低了教学仿真模型平台使用的灵活性。
技术实现要素:
4.要解决的技术问题:本发明提供的一种动物教学仿真模型平台及其操作方法,可以解决上述提到的动物教学仿真模型平台进行仿真教学时存在的问题。
5.技术方案:为了实现上述目的,本发明采用以下技术方案,一种动物教学仿真模型平台,包括放置板、限位装置、放置装置和仿真犬,所述的放置板上端靠近左侧安装有限位装置,限位装置右端安装有放置装置,放置装置上卡接有仿真犬。
6.所述的放置装置包括圆板、三角框、限位环、下压机构、支撑机构、移动杆、电动推杆和侧撑板,所述的限位装置右端安装有圆板,圆板周向表面安装有三角框,三角框内壁安装有多个周向均匀分布的限位环,限位环位于三角框尖角处,圆板右端靠近上侧处开设有滑槽,滑槽内部连接有下压机构,圆板右端靠近下侧处前后对称安装有支撑机构,圆板右端靠近后侧处开设有导槽,导槽内部滑动连接有移动杆,移动杆后端固定连接有电动推杆,电动推杆后端与导槽槽壁固定连接,移动杆前端靠近右侧处安装有侧撑板。
7.所述的支撑机构包括支撑板、球铰杆、放置套、绑紧带、连接套、t型板和限位弹簧,所述的圆板右端靠近下侧处安装有支撑板,支撑板上端左右对称开设有圆台槽,圆台槽底部转动连接有球铰杆,球铰杆上端安装有放置套,放置套靠近圆板的一侧开设有开口,放置套侧壁一端固定连接有绑紧带的一端,绑紧带另一端固定连接有连接套,放置套侧壁另一端开设有滑动弧槽,放置套侧壁靠近滑动弧槽处上端均匀开设有多个卡接槽,连接套与滑动弧槽滑动配合,连接套内部滑动连接有t型板,t型板横向段与卡接槽滑动配合,放置套下端与圆台槽侧壁之间固定连接有多个周向均匀分布的限位弹簧。
8.作为本发明的一种优选技术方案,所述的限位装置包括三角板、圆柱、驱动电机和卡接机构,所述的放置板上端安装有三角板,三角板中部转动连接有圆柱,圆柱右端与圆板固定连接,圆柱左端固定连接有驱动电机的输出轴,驱动电机通过电机座与三角板固定连
接,三角板上下对称连接有卡接机构。
9.作为本发明的一种优选技术方案,所述的下压机构包括滑动块、电动下压推杆、圆杆、连接杆、限位单元、矩形杆和下压板,所述的滑槽内部滑动连接有滑动块,滑动块下端固定连接有电动下压推杆,电动下压推杆下端与滑槽槽壁固定连接,滑动块右端安装有圆杆,圆杆靠近左侧处安装有连接杆,连接杆下端安装有限位单元,连接杆右方设置有矩形杆,矩形杆与圆杆固定连接,矩形杆下端固定连接有下压板,下压板下端铺设有橡胶垫。
10.作为本发明的一种优选技术方案,所述的卡接机构包括卡接柱、辅助板和卡接弹簧,所述的三角板上滑动贯穿有卡接柱,卡接柱左端安装有辅助板,辅助板与三角板之间固定连接有卡接弹簧。
11.作为本发明的一种优选技术方案,所述的仿真犬的四肢、头部和尾部分别与身体之间通过卡接配合的方式连接,仿真犬的身体内部设置有相应的骨骼。
12.作为本发明的一种优选技术方案,所述的卡接柱右端设置有半圆形凸起,半圆形凸起与限位环卡接配合。
13.作为本发明的一种优选技术方案,所述的限位单元包括弧形板、弹片、导向弧杆和连接弹簧,所述的连接杆下端安装有弧形板,弧形板下端前后对称安装有弹片,弹片上端安装有导向弧杆,导向弧杆与弧形板滑动贯穿配合,弹片上端与弧形板之间固定连接有连接弹簧。
14.此外,本发明还提供了一种动物教学仿真模型平台的操作方法,具体包括以下步骤:
15.s1:人工将仿真犬的四肢套设在放置套内,人工滑动t型板,t型板通过连接套带动绑紧带对仿真犬的四肢进行绑紧,之后将t型板横向段插入卡接槽内。
16.s2:人工启动下压机构,下压机构对仿真犬的背部进行夹紧限位,通过电动推杆带动移动杆移动,移动杆带动侧撑板对仿真犬的身体进行限位。
17.s3:通过限位装置带动圆板进行转动,圆板通过下压机构和支撑板带动仿真犬进行换边转动,限位装置与限位环配合,从而对三角框进行限位。
18.s4:在仿真犬教学完成后,人工将仿真犬从放置套内取出,教学完成。
19.有益效果:1.本发明提供的一种动物教学仿真模型平台所采用的放置装置可以在仿真犬教学时对仿真犬进行支撑限位,减少了教学者手动支撑的操作,从而提高了教学展示的稳定性,减少了教学者体能的消耗。
20.2.本发明提供的一种动物教学仿真模型平台所采用的限位装置与放置装置配合,可以对仿真犬进行换边处理,从而增加了教学者教学的范围,并且便于观察者的观察,提高了教学仿真模型平台使用的灵活性。
附图说明
21.下面结合附图和实施例对本发明进一步说明。
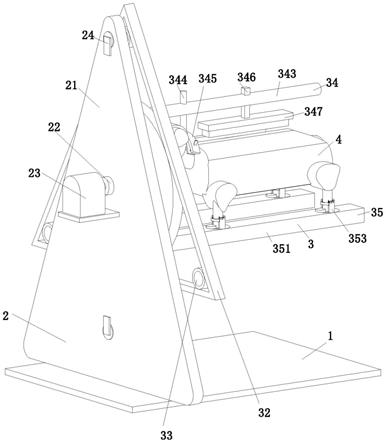
22.图1是本发明的立体结构示意图。
23.图2是本发明放置板、限位装置和放置装置的第一视角立体结构示意图。
24.图3是本发明放置板、限位装置和放置装置的第二视角立体结构示意图。
25.图4是本发明放置板、限位装置和放置装置的的主视图。
26.图5是本发明放置板、限位装置和放置装置的的俯视图。
27.图6是本发明图4中a-a的剖视图。
28.图7是本发明图5中b-b的剖视图。
29.图8是本发明图6中n向的放大图。
30.图9是本发明图2中x向的放大图。
31.图中:1、放置板;2、限位装置;21、三角板;22、圆柱;23、驱动电机;24、卡接机构;241、卡接柱;242、辅助板;243、卡接弹簧;3、放置装置;31、圆板;32、三角框;33、限位环;34、下压机构;341、滑动块;342、电动下压推杆;343、圆杆;344、连接杆;345、限位单元;3451、弧形板;3452、弹片;3453、导向弧杆;3454、连接弹簧;346、矩形杆;347、下压板;35、支撑机构;351、支撑板;352、球铰杆;353、放置套;354、绑紧带;355、连接套;356、t型板;357、限位弹簧;36、移动杆;37、电动推杆;38、侧撑板;4、仿真犬。
具体实施方式
32.以下结合附图对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
33.参阅图1-图5,一种动物教学仿真模型平台,包括放置板1、限位装置2、放置装置3和仿真犬4,所述的放置板1上端靠近左侧安装有限位装置2,限位装置2右端安装有放置装置3,放置装置3上卡接有仿真犬4。
34.参阅图1,所述的仿真犬4的四肢、头部和尾部分别与身体之间通过卡接配合的方式连接,仿真犬4的身体内部设置有相应的骨骼。
35.参阅图6-图7,所述的放置装置3包括圆板31、三角框32、限位环33、下压机构34、支撑机构35、移动杆36、电动推杆37和侧撑板38,所述的限位装置2右端安装有圆板31,圆板31周向表面安装有三角框32,三角框32内壁安装有多个周向均匀分布的限位环33,限位环33位于三角框32尖角处,圆板31右端靠近上侧处开设有滑槽,滑槽内部连接有下压机构34,圆板31右端靠近下侧处前后对称安装有支撑机构35,圆板31右端靠近后侧处开设有导槽,导槽内部滑动连接有移动杆36,移动杆36后端固定连接有电动推杆37,电动推杆37后端与导槽槽壁固定连接,移动杆36前端靠近右侧处安装有侧撑板38,具体工作时,人工将仿真犬4放置在支撑机构35上,支撑机构35对仿真犬4进行固定,人工启动下压机构34,下压机构34对仿真犬4背部进行夹紧限位,之后通过电动推杆37带动移动杆36进行移动,移动杆36带动侧撑板38对仿真犬4的身体进行限位。
36.参阅图9,所述的支撑机构35包括支撑板351、球铰杆352、放置套353、绑紧带354、连接套355、t型板356和限位弹簧357,所述的圆板31右端靠近下侧处安装有支撑板351,支撑板351上端左右对称开设有圆台槽,圆台槽底部转动连接有球铰杆352,球铰杆352上端安装有放置套353,放置套353靠近圆板31的一侧开设有开口,放置套353开口侧壁一端固定连接有绑紧带354的一端,绑紧带354另一端固定连接有连接套355,放置套353侧壁另一端开设有滑动弧槽,放置套353侧壁靠近滑动弧槽处上端均匀开设有多个卡接槽,连接套355与滑动弧槽滑动配合,连接套355内部滑动连接有t型板356,t型板356横向段与卡接槽滑动配合,放置套353下端与圆台槽侧壁之间固定连接有多个周向均匀分布的限位弹簧357,具体工作时,人工将仿真犬4的四肢分别插入四个放置套353内,然后滑动t型板356,t型板356通
过连接套355带动绑紧带354对仿真犬4的四肢进行绑紧限位,之后将t型板356横向段插入卡接槽内,从而对绑紧带354进行限位,限位弹簧357对放置套353起到限位的作用。
37.参阅图7,所述的下压机构34包括滑动块341、电动下压推杆342、圆杆343、连接杆344、限位单元345、矩形杆346和下压板347,所述的滑槽内部滑动连接有滑动块341,滑动块341下端固定连接有电动下压推杆342,电动下压推杆342下端与滑槽槽壁固定连接,滑动块341右端安装有圆杆343,圆杆343靠近左侧处安装有连接杆344,连接杆344下端安装有限位单元345,连接杆344右方设置有矩形杆346,矩形杆346与圆杆343固定连接,矩形杆346下端固定连接有下压板347,下压板347下端铺设有橡胶垫,具体工作时,通过电动下压推杆342带动滑动块341向下移动,滑动块341带动圆杆343向下移动,圆杆343通过连接杆344带动限位单元345对仿真犬的脖颈处进行紧贴限位,同时圆杆343通过矩形杆346带动下压板347下端的橡胶垫对仿真犬4的背部进行紧贴,从而增加了下压板347与仿真犬4背部的接触面积,提高了夹持的稳定性。
38.参阅图8,所述的限位单元345包括弧形板3451、弹片3452、导向弧杆3453和连接弹簧3454,所述的连接杆344下端安装有弧形板3451,弧形板3451下端前后对称安装有弹片3452,弹片3452上端安装有导向弧杆3453,导向弧杆3453与弧形板3451滑动贯穿配合,弹片3452上端与弧形板3451之间固定连接有连接弹簧3454,具体工作时,圆杆343通过连接杆344带动弧形板3451向下移动,弧形板3451带动弹片3452与仿真犬的脖颈处进行紧贴,弧形板3451继续下降,弹片3452受力带动导向弧杆3453在弧形板3451内滑动,连接弹簧3454对弹片3452起到复位的功能。
39.参阅图7,所述的限位装置2包括三角板21、圆柱22、驱动电机23和卡接机构24,所述的放置板1上端安装有三角板21,三角板21中部转动连接有圆柱22,圆柱22右端与圆板31固定连接,圆柱22左端固定连接有驱动电机23的输出轴,驱动电机23通过电机座与三角板21固定连接,三角板21上下对称连接有卡接机构24,具体工作时,在仿真犬4一侧观察完成后,通过驱动电机23带动圆柱22进行转动,圆柱22通过圆板31带动下压机构34和支撑板351转动,下压机构34和支撑板351带动仿真犬4进行换边转动,当仿真犬4换边结束后,卡接机构24与限位环33配合,从而对三角框32进行限位。
40.参阅图7,所述的卡接机构24包括卡接柱241、辅助板242和卡接弹簧243,所述的三角板21上滑动贯穿有卡接柱241,所述的卡接柱241右端设置有半圆形凸起,半圆形凸起与限位环33卡接配合,卡接柱241左端安装有辅助板242,辅助板242与三角板21之间固定连接有卡接弹簧243,具体工作时,通过驱动电机23带动圆柱22进行转动,圆柱22通过圆板31带动三角框32进行转动,三角框32对卡接柱241的半圆形凸起进行挤压,半圆形凸起带动卡接柱241向远离圆板31的方向移动,当三角框32带动限位环33移动至卡接柱241处后,卡接弹簧243通过辅助板242带动卡接柱241与限位环33配合,从而对三角框32进行限位。
41.此外,本发明还提供了一种动物教学仿真模型平台的操作方法,具体包括以下步骤:
42.s1:人工将仿真犬4的四肢套设在放置套353内,人工滑动t型板356,t型板356通过连接套355带动绑紧带354对仿真犬4的四肢进行绑紧,之后将t型板356横向段插入卡接槽内。
43.s2:人工启动下压机构34,下压机构34对仿真犬4的背部进行夹紧限位,通过电动
推杆37带动移动杆36移动,移动杆36带动侧撑板38对仿真犬4的身体进行限位。
44.s3:通过限位装置2带动圆板31进行转动,圆板31通过下压机构34和支撑板351带动仿真犬4进行换边转动,限位装置2与限位环33配合,从而对三角框32进行限位。
45.s4:在仿真犬4教学完成后,人工将仿真犬4从放置套353内取出,教学完成。
46.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1