无人设备训练系统和控制器的制作方法
1.本实用新型涉及无人飞行器领域,尤其涉及一种无人设备训练系统和控制器。
背景技术:
2.无人设备包括无人飞行器、无人车、无人船、航模、车模、船模等,以无人机为例,市面上的无人机训练系统主要由控制器、解码器、模拟飞行软件组成,学员训练过程需要使用控制器连接模拟飞行软件,在模拟的环境下训练飞行所需要的方向感,而解码器把遥控信号转换成电脑识别的协议,这种学习方式是主动的,学员是先在脑海中想好一个动作,协调手部做出相应的运动推动摇杆,然后模拟飞行软件反馈这个运动信号同步做出反应,如果跟脑海想的反应不一样就需要再次尝试,学员通过多次尝试大脑最终形成正确的条件反射。缺点学员需要多次尝试才能掌握方向感,没有教学人员在场指导,学习效率不高。
3.还有一种是采用实操教练模式,其主要由真实的无人机,主控制器,副控制器组成,实操模式是教练先把飞机飞上天,然后切换到学员的副遥控,让学员自己操控无人机,教练如果发现有危险会立即切换回主遥控,此时的副遥控是没有控制权,该模式的缺点是学员无法感受教练当时的实际操纵,继而也影响学习效果。
技术实现要素:
4.本实用新型的第一目的是提供一种可利用摇杆联动可实现跟随学习的控制器。
5.本实用新型的第二目的是提供一种具有上述控制器的无人设备训练系统。
6.为了实现本实用新型第一目的,本实用新型提供一种控制器,包括摇杆组件、通讯模块和主控模块,摇杆组件包括摇杆、x偏移传感器和y偏移传感器,x偏移传感器用于获取摇杆的x偏移量,y偏移传感器用于获取摇杆的y偏移量,主控模块与x偏移传感器、y偏移传感器连接,通讯模块和主控模块连接,控制器还包括被动驱动组件,被动驱动组件包括与主控模块连接的x驱动装置和y驱动装置,x驱动装置驱动摇杆沿x向移动,y驱动装置驱动摇杆沿y向移动。
7.由上述方案可见,通过x偏移传感器和y偏移传感器对摇杆的位置进行检测,继而控制器可实现正常的无人设备控制,另外还可通过通讯模块向其他控制器输出x偏移传感器和y偏移传感器采集的主控信号,继而可根据主控信号驱动x驱动装置和y驱动装置,使得控制器的摇杆跟随移动,从而使学员手握控制器可跟随学习,不仅可采用手动输入的主控信号,还可以采用由程序模拟的主控信号,继而模拟教练手把手教学模式,学员跟随操作,避免尝试的过程,矫正错误的认知,并且标准化的程序学员更好的理解动作的力度、角度、幅度等需要肢体感受的要素,更有效的理解复杂的操作,提高学习效率。
8.更进一步的方案是,被动驱动组件还包括x向连杆和定位支架,x向连杆铰接在摇杆和x驱动装置之间;x驱动装置安装在定位支架上,y驱动装置与定位支架连接并驱动定位支架沿y向移动。
9.更进一步的方案是,被动驱动组件还包括y向连杆,y向连杆铰接在定位支架和y驱
动装置之间。
10.更进一步的方案是,控制器还包括固定支架,固定支架安装在控制器的壳体上,被动驱动组件位于控制器的壳体外,y驱动装置安装在固定支架上,定位支架可移动地设置在固定支架上。
11.由上可见,通过x向连杆、定位支架、y向连杆和固定支架的设置,继而方便于被动驱动组件的外部安装,且连接驱动结构稳定,为摇杆提供稳定的x向y向驱动,通过外置的被动驱动装置可方便于传统控制器改装,继而实现联动学习功能。
12.更进一步的方案是,被动驱动组件包括x限位框,x限位框设置有沿y向延伸的第一限位槽,摇杆的杆部穿过第一限位槽,x驱动装置与x限位框连接并驱动x限位框沿x向移动。
13.更进一步的方案是,被动驱动组件包括y限位框,y限位框设置有沿x向延伸的第二限位槽,摇杆的杆部穿过第二限位槽,y驱动装置与y限位框连接并驱动y限位框沿y向移动。
14.由上可见,通过x限位框和y限位框对摇杆的限位,继而通过x驱动装置和y驱动装置可稳定地对摇杆进行x向y向驱动。控制器
15.为了实现本实用新型第二目的,本实用新型提供一种无人设备训练系统,包括无人设备、主控制器和副控制器,主控制器和副控制器分别采用上述方案的控制器,主控制器与无人设备通讯连接,主控制器与副控制器通讯连接。
附图说明
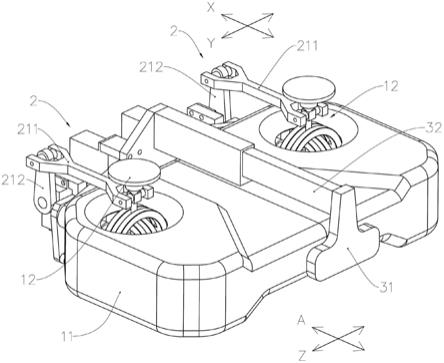
16.图1是本实用新型控制器第一实施例的结构图。
17.图2是本实用新型控制器第一实施例在另一视角下的结构图。
18.图3是本实用新型控制器第一实施例中被动驱动组件的结构图。
19.图4是本实用新型无人设备训练系统实施例中副控制器的系统连接图。
20.图5是本实用新型无人设备训练系统实施例中主副控制器的系统连接图。
21.图6是本实用新型无人设备训练方法第一实施例的流程图。
22.图7是本实用新型无人设备训练方法第二实施例的流程图。
23.图8是本实用新型控制器第二实施例的结构图。
24.图9是本实用新型控制器第二实施例在省略壳体后的结构图。
25.以下结合附图及实施例对本实用新型作进一步说明。
具体实施方式
26.控制器第一实施例:
27.参照图1至图3,控制器包括摇杆组件、通讯模块和主控模块,摇杆组件包括两个被动驱动组件2、两个摇杆12、x偏移传感器和y偏移传感器,x偏移传感器用于获取摇杆12的x偏移量,y偏移传感器用于获取摇杆12的y偏移量,主控模块与x偏移传感器、y偏移传感器连接,通讯模块和主控模块连接。
28.被动驱动组件2包括x向连杆211、x向连杆212、x驱动装置213、y驱动装置218、定位支架214、y向连杆216和y向连杆217,被动驱动组件2设置在控制器的壳体11的外侧且位于x向的朝前端,两个摇杆12沿y向分布,继而两个被动驱动组件2也呈沿y向分布。x驱动装置213和y驱动装置218可采用电机驱动。
29.x向连杆211和x向连杆212沿x向排布,x向连杆211呈水平布置,x向连杆212沿竖直布置,x向连杆211与摇杆12铰接,x向连杆211、x向连杆212和x驱动装置213依次铰接连接,在x驱动装置213的转动驱动下,驱动摇杆12沿x向移动或转动。x驱动装置213固定安装在定位支架214上,y向连杆216和y向连杆217沿y向排布,y向连杆216的一端与定位支架214铰接,y向连杆216、y向连杆217和y驱动装置218依次铰接,在y驱动装置218的转动驱动下,驱动定位支架214和x驱动装置213在y向移动或转动,继而实现驱动摇杆12沿y向移动或转动。
30.固定支架包括安装支架31和夹持支架32,夹持支架32可相对于安装支架31伸缩移动,继而实现安装支架31和夹持支架32对壳体11的夹持定位安装,安装支架31在两侧设置有铰接孔,定位支架214上设置有铰接柱215,铰接柱215与铰接孔配合,继而实现定位支架214可转动地安装在安装支架31上,y驱动装置218固定安装在安装支架31上。当然定位支架还可采用滑槽滑块的方式安装在安装支架上,以实现定位支架可移动地安装在安装支架上,同样也能够实现对摇杆的驱动。
31.无人设备训练系统实施例:
32.参照图4和图5,无人设备训练系统包括无人设备、主控制器和副控制器,无人设备包括但不限于无人飞行器、无人车、无人船、航模、车模、船模等,在本实施例中采用无人飞行器101进行举例说明,主控制器102和副控制器103分别采用上述实施例的控制器,在一般控制操控中可如图4所示的,副控制器203取得无人飞行器101的控制权,并执行步骤s11,副控制器103通过通讯模块与无人飞行器101连接并实现对无人飞行器101控制。
33.无人设备训练方法实施例:
34.在紧急状态下,或跟随学习状态下,如图5和图6所示的,主控制器执行步骤s21,主控制器发送控制切换信号,副控制器103执行步骤s12,接收控制切换信号,随后主控制器102与无人飞行器101连接并驱动控制权(s22),且同时主控制器102通过通讯模块与副控制器103连接,继而可实现后续的体感联动,随后副控制器103执行步骤s13,副控制器103进入跟随学习模式。
35.随后主控制器对无人飞行器进行控制(s23),再执行步骤s24,主控制器采集对无人飞行器控制的主控信号,主控信号包括两个摇杆各自的x偏移信号和y偏移信号,x偏移信号包括x向行程、x向加速度和触发时间,x偏移信号包括y向行程、y向加速度和触发时间,随后执行步骤s25,向副控制器103发送该主控信号。
36.副控制器103执行步骤s14,接收主控制器10输出的主控信号,随后执行步骤s15,副控制器103根据主控信号中的两个摇杆各自的x偏移信号和y偏移信号,来对应驱动两个被动驱动组件2的x驱动装置213、y驱动装置218,使副控制器103的两个摇杆跟随主控制器102的两个摇杆移动,从而实现教练操作主控制器102的动作被副控制器103跟随,使学员在操作副控制器103时实时跟随学习。
37.在实际应用中,单个控制器也可单独学习使用,参见图7,即连接于飞行设备模拟学习系统,模拟学习系统内设置有控制器,其设置有控制程序,且存储有教练预录的摇杆动作,配合预设的学习场景,在模拟学习系统与副遥控器连接后,执行步骤s31,根据由模拟系统生成的主控信号输出给副控制器,且副控制器在进入跟随学习模式后,并接收到主控信号,随后根据主控信号再驱动摇杆的移动,从而使学员跟随模拟系统学习操作。飞行模拟系统通过有经验的教练操控普通控制器连接飞行模拟器,软件记录操控过程中的摇杆信号,
或者通过电脑设定无人机动作自动生成摇杆信号,并记录到可读存储介质上,再利用这些摇杆信号解码后反向输出到带有驱动装置的控制器上。
38.可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上述的无人设备训练方法的步骤。
39.另外,上述实施例中两个摇杆的xy偏移信号在对应于飞行系统的控制信号时,则其中一个xy偏移信号代表飞行器的的横滚和俯仰,另一个xy偏移信号油门z和方向a,z代表无人机的垂直移动的自由度,a代表无人机水平旋转的自由度。另外在对应于其他无人设备的操控上,则可根据实际情况进行定义。在附图那里说明另外一个摇杆式控制az的,并且说明以上内容以xy方向做说明,az的控制方式类同。
40.控制器第二实施例:
41.参照图8和图9,控制器第二实施例的被动驱动组件可以壳体内置,具体地,控制器的壳体41内设置有主控电路板43和电池46,主控电路板43上设置有两个摇杆42、主控模块和通讯模块。
42.被动驱动组件包括x限位框442和y限位框441,x限位框442和y限位框441分别呈弧形布置,x限位框442位于y限位框441的外侧,x限位框442设置有沿y向延伸的第一限位槽444,y限位框441设置有沿x向延伸的第二限位槽443,摇杆42的杆部穿过第一限位槽444和第二限位槽443,x限位框442和y限位框441分别可转动地设置在主控电路板42上,x限位框442的轴向一端连接有x偏移传感器431,y限位框441的轴向一端连接有y偏移传感器432,x偏移传感器431和y偏移传感器432可采用电位器、角度传感器等检测器件进行检测角度,x限位框442的轴向另一端连接有x驱动装置452,x驱动装置452驱动x限位框442沿x向移动,y限位框441的轴向另一端连接有y驱动装置451,y驱动装置218驱动y限位框441沿y向移动。
43.通过从其他控制器或者从模拟系统获取主控信号,继而可实现驱动两个摇杆的转动。
44.由上可见,通过x偏移传感器和y偏移传感器对摇杆的位置进行检测,继而控制器可实现正常的无人设备控制,另外还可通过通讯模块向其他控制器输出x偏移传感器和y偏移传感器采集的主控信号,继而可根据主控信号驱动x驱动装置和y驱动装置,使得控制器的摇杆跟随移动,从而使学员手握控制器可跟随学习,不仅可采用手动输入的主控信号,还可以采用程序模拟的主控信号,继而模拟教练手把手教学模式,学员跟随操作,避免尝试的过程,矫正错误的认知,并且标准化的程序学员更好的理解动作的力度、角度、幅度等需要肢体感受的要素,更有效的理解复杂的操作,提高学习效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1