一种用于课堂教育的麦克纳姆轮机器人
1.本实用新型涉及水机器人技术领域,具体涉及一种用于课堂教育的麦克纳姆轮机器人。
背景技术:
2.在人工智能技术飞速发展的时代背景下,人工智能已开始不断走入中小学阶段,让中小学生早日了解人工智能相关知识具有一定必要性。在顺应时代的发展和国家的号召的背景下,许多学校已开设人工智能教育课程并不断普及人工智能教育。开展人工智能教育,对中小学生了解人工智能的应用和发展,认识到科学技术发挥的巨大作用,接触到人工智能编程和尽早形成智能化意识有巨大好处。在中小学生的人生发展上,普及人工智能教育可以帮助中小学生确立正确的人生发展方向,运用人工智能及技术去帮助自己的学习,更好地了解和适应社会的变迁。因此,鉴于人工智能教育的重要性,在基础教育领域,人工智能教育已受到一定重视。
3.在此大背景下,开发适用于中小学人工智能教育课堂的软硬件资源,构建人工智能教学环境显得尤为重要。而目前,市面上主要存在几类相关产品尽管各有各的优势,但也存在众多不适用于人工智能教育的不足之处。例如有以arduino机器人为代表的传统硬件控制机器人,其硬件多为传统传感器的拼接和组合实用,没有搭载麦克风、摄像头、音响等用于图像识别和语音识别这些极具人工智能元素的智能化传感器,因此不适用于人工智能课堂教学;以乐高教育机器人为代表的积木式拼接机器人往往注重于学生在硬件结构上面的拼接,却忽视了学生们的课堂时间有限,难以既兼顾机器人结构拼接方面的学习又兼顾人工智能方面的学习,因此这类机器人也不适用于人工智能课堂的教学;以大疆教育机器人为代表的一体化竞赛机器人,其机器人本体固定了用于发射水晶弹的炮机,其具有的一定危险性及使用所需空间较大使其难以适用于有限空间的课堂教学。同时机器人本体搭配的有限的传感器往往已经固定了,而这往往与课堂教学的多样性、趣味性和创造性背道而驰,不可拆卸和安装也不方便传感器的单独使用和讲解,因此此类机器人也不适用于人工智能的课堂教学。
4.在缺乏专门用于中小学人工智能教育的合适教具的背景下,配合中小学人工智能软件教育的需求,设计一套专门用于人工智能教育的硬件教具显得尤为重要。该套教具不仅需要提供各种人工智能教育涉及的功能模块,还需要一定的可观赏性、稳定性、灵活性、易操作性和易拼接性,更好地激发中小学生的兴趣并辅助他们学习。
技术实现要素:
5.有鉴于此,有必要针对上述的问题,提供一种用于课堂教育的麦克纳姆轮机器人。
6.为实现上述目的,本实用新型采取以下的技术方案:包括:底板,多个第一传感器安装板,第一传感器安装板设于底板的上方且朝向远离底板的方向延伸,第一传感器板上设有多个间隔排列的第一接口;多个传感器模块,多个传感器模块设于第一传感器安装板
上,传感器模块上设有第三接口,其中,第三接口与第一接口配合。
7.本实用新型的有益效果为:通过设置多个第一传感器安装板,在多个传感器模块上设置统一的第三接口,使得多个传感器模块可以在任一第一传感器安装板上安装,实现了可拆卸和任意组合,方便教学和讲解,满足人工智能教育的需求,具备灵活性和易操作性。
8.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人,第二传感器安装板,第二传感器安装板设于底板底部,第二传感器安装板上设有多个间隔排列的第二接口,在水平面上,底板的投影与第二传感器安装板的投影不重合,其中,第一接口与第二接口尺寸相同,多个传感器模块设于第一传感器安装板和第二传感器安装板上。
9.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人,通过设置多个第一传感器安装板和第二传感器安装板,在多个传感器模块上设置统一的第三接口,使得多个传感器模块可以在任一第一传感器安装板或第二传感器安装板上安装,实现了可拆卸和任意组合,方便教学和讲解,满足人工智能教育的需求,具备灵活性和易操作性。
10.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人,第一传感器安装板上设有第一接线槽,第二传感器安装板上设有第二接线槽。通过设置第一接线槽和第二接线槽能够方便导线穿过,方便传感器模块与麦克纳姆轮机器人上的其他模块电连接。
11.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人,任意两个相对的第一传感器安装板在逐渐远离底板的方向上朝向靠近彼此的方向倾斜,由此能够减小麦克纳姆轮机器人行进时的阻力。
12.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人,还包括:驱动板,多个第一传感器安装板拼接形成中空腔体,驱动板用于驱动麦克纳姆轮机器人移动,驱动板设于中空腔体内。由此使得麦克纳姆轮机器人整体结构紧凑。
13.可选地,还包括支架,支架设于中空腔体内,支架远离底板的一端设有摄像头模块。摄像头模块的视野对着麦克纳姆轮机器人的行进方向,如此设置,能够使得麦克纳姆轮机器人的整体结构设置合理,降低支架以及摄像头模块阻挡第一传感器安装板的可能性,使得传感器模块容易在第一传感器安装板上拔插。
14.可选地,还包括电池,电池设于底板和驱动板之间,由此使得中空腔体内的结构布局合理。
15.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人,还包括至少两组轮毂,至少两组轮毂设于底板上并沿底板的行进方向排布,由此实现麦克纳姆轮机器人的行走移动。
16.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人,还包括树莓派组件,树莓派组件设于第一传感器安装板远离底板的一端。如此设置极大程度上方便了麦克纳姆轮机器人的安装以及人工智能课堂教育上人工智能案例的开发。
17.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人,还包括屏幕和音响,屏幕和音响设于位于底板头部的第一传感器安装板上,如此设置能够更进一步地增加麦克纳姆轮机器人功能的多样性,丰富人工智能课堂教育上人工智能案例的开发。
18.可选地,位于底板的头部和位于底板的尾部的第一传感器安装板上还设有第三接线槽,屏幕和音响与树莓派组件电连接,如此设置,能够方便导线穿过第一传感器安装板,
降低导线凌乱缠绕的可能性。
附图说明
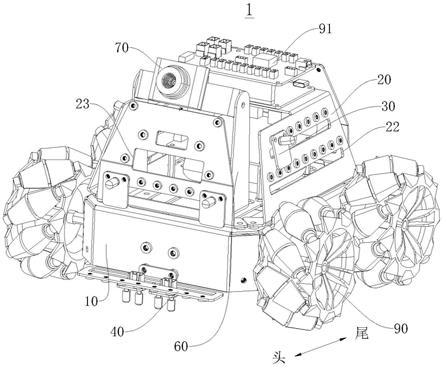
19.图1为根据本实用新型实施例的麦克纳姆轮机器人的一个立体图;
20.图2为根据本实用新型实施例的麦克纳姆轮机器人的再一个立体图;
21.图3为根据本实用新型实施例的麦克纳姆轮机器人的另一个立体图;
22.图4为根据本实用新型实施例的麦克纳姆轮机器人的又一个立体图。
23.附图标记:
24.麦克纳姆轮机器人1,
25.底板10,
26.第一传感器安装板20,第一接口21,第一接线槽22,第三接线槽23,
27.传感器模块30,
28.第二传感器安装板40,第二接口41,第二接线槽42,
29.驱动板50,支架60,摄像头模块70,电池80,轮毂90,树莓派组件91,屏幕92。
具体实施方式
30.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将结合具体实施例以及附图对本实用新型作进一步介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
31.图1-图4是根据本实用新型实施例的麦克纳姆轮机器人1。
32.如图1-图4所示,根据本实用新型实施例的麦克纳姆轮机器人1,包括底板10、多个第一传感器安装板20和多个传感器模块30。
33.具体地,第一传感器安装板20设于底板10的上方且朝向远离底板10的方向延伸,第一传感器板上设有多个间隔排列的第一接口21;多个传感器模块30设于第一传感器安装板20上,传感器模块30上设有第三接口,其中,第三接口与第一接口21配合。
34.需要说明的是,多个传感器模块30可以是led模块、红外避障模块、超声波模块等等。在一些实施例中,第三接口统一使用具有易拔插、防反插功能的xh接口且线序统一为gpio、5v、gnd的3pin接口又或着为gpio_a、gpio_b、gnd、5v的4pin接口。
35.根据本实用新型实施例的麦克纳姆轮机器人1,通过设置多个第一传感器安装板20,在多个传感器模块30上设置统一的第三接口,使得多个传感器模块30可以在任一第一传感器安装板20上安装,实现了可拆卸和任意组合,方便教学和讲解,满足人工智能教育的需求,具备灵活性和易操作性。
36.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人1,第二传感器安装板40,第二传感器安装板40设于底板10底部,第二传感器安装板40上设有多个间隔排列的第二接口41,在水平面上,底板10的投影与第二传感器安装板40的投影不重合,其中,第一接口21与第二接口41尺寸相同,多个传感器模块30设于第一传感器安装板20和第二传感器安装板40上,即多个传感器模块30可以设于第一传感器安装板20和第二传感器安装板40上,多个传感器模块30也可以设于同一第一传感器安装板20上,多个传感器模块30可以设
于不同的第一传感器安装板20上。在水平面上,底板10的投影与第二传感器安装板40的投影不重合,能够方便传感器模块30在第二传感器安装板40上的安装拆卸,使得传感器模块30不受阻挡。如图1和图2所示,在一些实施例中,第二传感器安装板40设于底板10的头部,在一些实施例中,第二传感器安装板40设于底板10的尾部,可以根据需要设置,可以在底板10的头部和尾部均设置第二传感器安装板40。
37.根据本实用新型实施例的用于课堂教育的麦克纳姆轮机器人1,通过设置第二传感器安装板40和多个第一传感器安装板20,在多个传感器模块30上设置统一的第三接口,使得多个传感器模块30可以在第二传感器安装板40或任一第一传感器安装板20上安装,实现了可拆卸和任意组合,方便教学和讲解,满足人工智能教育的需求,具备灵活性和易操作性。
38.在一些实施例中,底板10的上方两侧分别设有第一传感器安装板20,底板10的上方头部和尾部分别设有第一传感器安装板20,底板10上设有标准化孔距和孔径的第一压铆螺母定位孔用于固定第一传感器安装板20。
39.如图1-图4所示,在本实用新型的一些实施例中,第一传感器安装板20上设有第一接线槽22,第二传感器安装板40上设有第二接线槽42。通过设置第一接线槽22和第二接线槽42能够方便导线穿过,方便传感器模块30与麦克纳姆轮机器人1上的其他模块电连接。
40.如图4所示,在本实用新型的一些实施例中,任意两个相对的第一传感器安装板20在逐渐远离底板10的方向上朝向靠近彼此的方向倾斜,由此能够减小麦克纳姆轮机器人1行进时的阻力。
41.如图4所示,在本实用新型的一些实施例中,麦克纳姆轮机器人1还包括驱动板50,多个第一传感器安装板20拼接形成中空腔体,驱动板50用于驱动麦克纳姆轮机器人1移动,驱动板50设于中空腔体内。由此使得麦克纳姆轮机器人1整体结构紧凑。
42.如图1-图4所示,可选地,麦克纳姆轮机器人1还包括支架60,支架60设于中空腔体内,支架60远离底板10的一端设有摄像头模块70。摄像头模块70的视野对着麦克纳姆轮机器人1的行进方向,如此设置,能够使得麦克纳姆轮机器人1的整体结构设置合理,降低支架60以及摄像头模块70阻挡第一传感器安装板20的可能性,使得传感器模块30容易在第一传感器安装板20上拔插。
43.如图2所示,可选地,麦克纳姆轮机器人1还包括电池80,电池80设于底板10和驱动板50之间,由此使得中空腔体内的结构布局合理。
44.如图1-图4所示,在本实用新型的一些实施例中,麦克纳姆轮机器人1还包括至少两组轮毂90,至少两组轮毂90设于底板10上并沿底板10的行进方向排布,由此实现麦克纳姆轮机器人1的行走移动。
45.如图1和图2所示,在本实用新型的一些实施例中,麦克纳姆轮机器人1还包括树莓派组件91,树莓派组件91设于第一传感器安装板20远离底板10的一端。如此设置极大程度上方便了麦克纳姆轮机器人1的安装以及人工智能课堂教育上人工智能案例的开发。
46.在一些实施例中,底板10的上方两侧分别设有第一传感器安装板20,底板10的上方头部和尾部分别设有第一传感器安装板20,树莓派组件91设于底部上方两侧的第一传感器安装板20上,该第一传感器安装板20上设有用于固定树莓派组件91的第二定位孔。
47.在一些实施例中,树莓派组件91上设有多个3pin的传感器xh接口,若干个4pin的
传感器xh接口,多个3pin的pwm波输出的xh接口,1个uart通信接口,1个iic通信接口,1个spi通信接口,极大程度上丰富了人工智能课堂教学的案例选择,简化了装载传感器的过程。
48.如图1和图2所示,在本实用新型的一些实施例中,麦克纳姆轮机器人1还包括屏幕92和音响,屏幕92和音响设于位于底板10头部的第一传感器安装板20上,如此设置能够更进一步地增加麦克纳姆轮机器人1功能的多样性,丰富人工智能课堂教育上人工智能案例的开发。
49.在一些实施例中,底板10的上方两侧分别设有第一传感器安装板20,底板10的上方头部和尾部分别设有第一传感器安装板20,屏幕92和音响由于尺寸原因,优选地,设于位于底板10的头部或尾部的第一传感器安装板20上,该第一传感器安装板20上设有第三定位孔用于固定屏幕92,该第一传感器安装板20上还设有第四定位孔用于固定音响。
50.如图4所示,可选地,位于底板10的头部和位于底板10的尾部的第一传感器安装板20上还设有第三接线槽23,屏幕92和音响与树莓派组件91电连接,如此设置,能够方便导线穿过第一传感器安装板20,降低导线凌乱缠绕的可能性。
51.需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“水平”、“顶”、“内”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
52.术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“一组”的含义是两个或两个以上。
53.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1