一种装备维修训练系统
1.本发明涉及自动控制领域,尤其涉及一种装备维修训练系统。
背景技术:
2.装备维修训练系统,能够实现对诸如炮弹装弹机的装备执行机构部件的控制功能,主要用于院校、基层单位等相关单位、人员进行装备执行机构部件的教学、训练与维修的需要,同时为有关涉及装备执行机构部件的科研课题提供基本的实验平台,促进教学和科研同步发展。
3.在教学系统中,通过模拟自动装弹机的执行机构,可以实现装备模拟化,方便学生操作使用,便于教学使用。作为自动装弹机的完整系统,实现各个执行机构的控制。装备维修训练系统实现对自动装弹机执行机构的功能与性能检测,保证学生教学、接入实装时,可以确定实装的工作状态,方便学生学习及维修,加深对自动装弹机的理解。
4.现有装备维修训练系统不能对执行机构单步控制,也不具备执行状态和执行过程监控功能、故障注入与诊断和故障机理演示功能。
技术实现要素:
5.鉴于上述问题,本发明提出了一种装备维修训练系统以克服上述问题或者至少部分地解决上述问题。
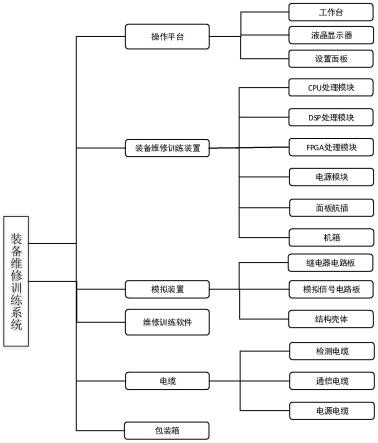
6.一种装备维修训练系统,包括:操作平台、装备维修训练装置、模拟装置、装备维修训练软件、电缆、包装箱;
7.操作平台布置液晶显示器和设置面板,通过设置面板,模拟执行机构的故障,并通过装备维修训练装置完成故障诊断;
8.装备维修训练装置采用cpu处理模块+dsp模块的应用方案,以cpu处理模块为处理核心,cpu处理模块用于采集、分析、处理和显示,dsp模块提供开关量资源、ad资源、da资源,并进行放大、缩小、控制,使得被测部件的信号输入到cpu模块进行处理,用于系统的状态检测与分步控制;
9.模拟装置通过模拟实装的信号,通过内部线缆连接至装备维修训练装置,模拟实装信号的采集、控制功能;
10.装备维修训练系统软件包括运行在维修训练装置处理终端的装备状态分析与管理软件和运行在装备维修训练系统中的嵌入式数据采集与处理软件;
11.电缆由检测电缆、通信电缆、电源电缆组成;
12.包装箱容纳装备维修训练装置以及各配件。
13.进一步,所述装备维修训练系统通过电缆与被测部件的旋转输弹机、提升机、推弹机、火炮闭锁器相连,对被测部件检测,或者依据装备维修训练系统内的模拟训练装置,直接采集信号检测。
14.进一步,所述采用cpu处理模块+dsp模块的应用方案包括以cpu处理模块为处理核
心,通过dsp模块进行继电器控制信号、数字信号处理、模拟信号处理、通信部分功能的模拟,dsp模块板与被测部件间进行信号的实时传输反馈,同时信号模拟板通过rs422将数据传输给部件检测设备的操控软件,在所述操控软件上显示被测部件的功能模块的功能情况。
15.进一步,所述cpu处理模块的主控系统由cpu、fpga和dsp组成。
16.进一步,所述模拟装置的模拟信号电路板对于外部输入的模拟信号在检测电缆传输过程中引入的噪声信号而引起检测信号的误判,先经由tvs管的保护,其后进行分压、低通滤波,抑制高频干扰信号而消除引起检测信号的误判。
17.进一步,所述装备维修训练系统软件整体采用上位机和下位机两个层次,所述上位机为装备状态分析与管理软件,所述下位机为嵌入式数据采集与处理软件。
18.进一步,所述嵌入式数据采集与处理软件通过控制嵌入式融合设备硬件实现执行机构装备上所需运行工作参数的状态信息的数据采集、数据转换、数据传输、数据分析、数据分类、数据存储、信息编码,实现故障判断、故障报警、故障指示的功能。
19.进一步,所述嵌入式数据采集与处理软件包括嵌入式操作系统和嵌入式应用软件,嵌入式操作系统选用dsp内核,根据功能要求进行定制;嵌入式应用软件负责管理和控制设备硬件,实现数据采集、数据编码与处理、数据分析、数据存储、数据通讯、故障预警、数据导出的功能。
20.进一步,所述装备状态分析与管理软件包括装备管理模块、数据通讯模块、运行状态监控、数据分析模块、故障预测模块、数据管理模块。
21.进一步,所述装备状态分析与管理软件模块之间的功能相对独立以降低耦合性,模块之间通过消息传递或者以数据库为媒介建立联系,互相配合完成装备工作状态数据的技术分析、故障诊断和预测功能。
22.本技术实施例中提供的技术方案,至少具有如下技术效果或优点:
23.1)对装备执行机构部件的分步控制,支持单控、多控与联控等工作模式;
24.2)对装备执行机构部件的执行状态和执行过程监控;
25.3)对装备执行机构的故障注入和故障机理演示,支持硬件调节和软件设置,实现教学中故障设置与排除;
26.4)对装备执行机构部件的状态检测和故障诊断,;
27.5)对装备执行机构部件的驱动控制;
28.6)对装备执行机构部件的考核科目设置与训练考核;
29.7)对装备执行机构部件的常见机械故障设置与维修指导。
30.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
31.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
32.图1示出了装备维修训练系统组成框图;
33.图2示出了装备维修训练系统原理框图;
34.图3示出了装备维修训练装置主机结构示意图;
35.图4a和图4b示出了模拟装置结构示意图;
36.图5示出了模拟装置内部效果图;
37.图6示出了输入反接保护、过流保护及滤波电路原理图;
38.图7示出了5v转换电路硬件原理图;
39.图8示出了3.3v转换电路硬件原理图;
40.图9示出了cpu处理模块原理框图;
41.图10示出了cpu处理模块内部原理图;
42.图11示出了gpio时序图;
43.图12示出了mcbsp时序图;
44.图13示出了dsp外围连接框图;
45.图14示出了dsp与flash连接关系图;
46.图15示出了dsp与sdrram的接口设计;
47.图16示出了fpga设计电路框图;
48.图17示出了fpga加载实现框图;
49.图18示出了开关量信号条调理电路;
50.图19示出了ad信号输入调理电路;
51.图20示出了da信号输出调理电路;
52.图21示出了usb转rs422通信电路硬件设计原理图;
53.图22示出了装备维修训练系统软件组成图;
54.图23示出了装备维修训练系统软件总体结构图;
55.图24示出了嵌入式处理软件的功能结构;
56.图25示出了装备状态分析与管理软件组成框图;
57.图26示出了软件模块之间的逻辑关系。
58.图中:1-资源接口;2-电源接口;3-产品铭牌;4-上架固定支架;5-保险管;6-检测航插接口;7-工作指示灯;8-锁紧装置;9-插板;10-底板。
具体实施方式
59.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
60.本发明实现的装备维修训练系统包括操作平台、装备维修训练装置、模拟装置、维修训练软件、电缆、包装箱。
61.操作平台布置液晶显示器和设置面板的工作台,通过设置面板,模拟执行机构的故障,并通过装备维修训练装置完成故障诊断,供教学平台使用。
62.装备维修训练装置采用“cpu处理模块+dsp模块”的应用方案实现,以cpu处理模块
为核心,cpu处理模块主要实现数据的采集、分析、处理和显示的功能,dsp模块主要提供开关量资源、ad资源、da资源,并进行放大、缩小、控制,使得被测部件的信号输入到cpu模块进行处理,实现系统的状态检测与分步控制。
63.模拟装置通过模拟实装的信号,通过内部线缆连接至装备维修训练装置,模拟实装信号的采集、控制功能。
64.装备维修训练装置主要由cpu处理模块、dsp处理模块、fpga处理模块、电源模块、面板航插、机箱等组成。
65.电缆包括检测电缆、通信电缆、电源电缆。
66.包装箱用于容纳装备维修训练装置以及各配件。
67.所述装备维修训练系统组成框图如图1所示。
68.装备维修训练系统通过电缆与旋转输弹机、提升机、推弹机、火炮闭锁器的被测部件相连,实现对被测部件的检测,或者依据装备维修训练系统内的模拟训练装置,直接采集信号检测。同时可通过设置面板进行故障设置与诊断,实现教学系统的要求。装备维修训练系统原理框图如图2所示。
69.装备维修训练系统的核心为“cpu模块+dsp模块”处理数据,主要以cpu模块为处理核心,通过dsp模块来实现继电器控制信号、数字信号处理、模拟信号处理、通信部分功能的模拟。dsp模块板与被测部件间进行信号的实时传输反馈,同时信号模拟板通过rs422将数据传输给部件检测设备的操控软件,在操控软件上显示被测部件的功能模块的功能情况。
70.cpu模块主要是通过同外设芯片或外部存储器进行数据传输,异步访问带sram接口的器件或者同步访问带nor flash或psram接口的器件。eim接口速率可达到104mhz,用于与dsp系统连接。
71.继电器控制信号:继电器控制信号通过dsp模块板上ad5668输出0~5v的模拟信号,通过运放op400ay将0~5v的模拟信号转为-5v~+5v的模拟信号作为继电器的模拟输入信号输出给被测部件,被测部件通过双口ram将继电器模拟输入的信号反馈给dsp模块板,dsp模块板通过串口回传给操控界面进行显示,来判断被测部件上ad芯片、单片机、存储器芯片功能是否正常。
72.数字信号处理:数字cpu等处理电路主要完成了对执行机构部件输入的24v、5v、悬空等类型的开关量信号的输出功能。通过控制继电器切换输出开关量信号。输出信号包括底板调理后的+24v电源、悬空状态或接地,实现24v与接地、悬空与接地、悬空与5v输出的切换。
73.模拟信号处理:外输入的模拟信号在检测电缆传输过程中会引入一些高频噪声,这些噪声信号可能会引起检测信号的误判,严重时还可能影响整个cpu+dsp模块的工作。输入信号先经由tvs管的保护作用,其后跟分压、低通滤波电路,可有效抑制高频干扰信号。输入信号含有杂波都会对采集到的信号解析造成影响,可根据检测信号的频率选取滤波电容值,通过调整反馈电阻调整电路的放大增益。
74.通信部分功能:通过dsp模块板上双口ram芯片cy7c131采集到的电位器的值作为跟踪目标的位置模拟输出给被测部件,被测部件又通过双口ram回传给信号模拟板,信号模拟板通过串口回传给操控界面进行显示,来判断被测部件上138译码器、单片机、存储器芯片功能是否正常。
75.装备维修训练系统的结构形式为工作台形式,右侧放置液晶显示屏及鼠标键盘等外部部分,左侧方式为设置面板部分,用于设置故障及诊断,工作的中间部分放置装备维修训练装置主机部分和模拟装置部分,内部通过线缆连接,在工作台后下脚部分,放置电源输入和空气开关部分,用于系统供电。
76.装备维修训练装置主机外壳采用铸铝材料,由机身、盖板和底板组成,其结构尺寸:(不含连接器)其结构如图3所示。采用此设计,既可保证装备维修训练装置主机结构坚固、重量较轻,又方便维修拆装。
77.装备维修训练装置主机侧面装有固定孔位,与检测平台固定,机箱顶部有产品铭牌3,底部安装4只橡胶减震器。后面板安装96芯欧插及其他标准总线连接器,用于与模拟装置连接。
78.模拟装置外壳采用铸铝材料,由机身、盖板和底板10组成,其结构尺寸:(不含连接器),结构示意图如图4所示。采用此设计,既可保证模拟装置结构坚固、重量较轻,又方便维修拆装。
79.模拟装置顶部有设备产品铭牌3,底部安装有上架固定支架4。前面板安装检测航插接口6,用于连接被测设备;后面板安装资源接口1,用于连接装备维修训练装置主机。
80.模拟装置内部结构如图5所示,采用插卡式结构,每块插板9均安装锁紧装置8。插卡与底板10间采用欧式插头连接,底板10与前后面板均通过转接线连接。插卡结构、机箱底板可拆卸,利于调试、维修。
81.电路设计
82.电源转换电路设计
83.电源转换电路硬件设计主要实现cpu+dsp模块输入24v直流开关电源的反接保护、过流保护、滤波及转换功能,满足检测设备供电所需的稳定可靠5v、3.3v电源。
84.反接保护基于mosfet管进行设计,通过将基极接入输入电源正极,实现正确接入状态的导通控制,反向输入截止的保护机制,其原理如图6中r3_1和q3_1电路部分。过流保护基于自恢复保险的超出范围自动断开,范围内自动接通的原理进行设计,其原理如图6中f1电路部分。滤波电路通过共模电感及前后滤波电容实现输入电源的滤波,并通过前端压敏电阻实现异常尖峰的泄放,其滤波原理如图6中r0~c3_5间的电路部分。
85.5v转换电路选用低纹波大电流开关电源芯片,其硬件设计原理,如图7所示。
86.3.3v转换电路选用具有内部滤波的模块化电源,其硬件设计原理,如图8所示。
87.cpu处理模块
88.主控系统主要由cpu、fpga和dsp组成,外围再增加相关需要的功能和接口电路就可以实现具体功能。主控系统中mcimx6系列芯片作为cpu来使用,其核心为arm cortexa9,内核是4core,数据总线宽度32bit,最大时钟频率1gh cpu控制部分可做成模块形式,通过高密度板间对接插座与fpga、dsp及外部接口等的模块进行数据通信,这样升级和维护都比较方便。cpu处理模块原理框图如图9所示。
89.mcimx6系列芯片的相关串口、usb和lvds等常用接口都可以直接引出使用,可通过eim接口与fpga进行连接,fpga所控扩展串口、并口、音频和led灯等相关命令数据都会通过
eim接口与cpu进行交互。fpga主要作为逻辑控制使用,dsp则是用作数据处理器。dsp通过emif与外部存储进行数据通信,而与音频电路(主要是d\a芯片)之间是使用mcbsp进行通信和数据交互,再将有用的数据信息通过复用的gpio接口与fpga通信,如有需要fpga再与cpu进行相关数据交互以实现功能控制。cpu处理模块内部原理图如图10所示。
90.本主控系统选用dsp为tms320c64xx系列芯片,该系列dsp通过外部存储器接口(emif)与sdram、flash和fpga连接,也可通过gpio与fpga连接,构成典型的嵌入式dsp应用系统。tms320c64xx是ti公司新推出的dsp系列的一种,主要特点为:片内512k字节ram,操作速度高达600mhz,支持多种外部存储器接口,包括sram、sdram、raom和fif-0,增强的edma控制器,有64个edma通道。gpio接口的时序图,如图11所示,从图中可以看出gpio在发送和接收数据时是有时长条件的,时长是和芯片时钟频率有关,如果需将gpio从输入数据转换为输出数据则要等输入数据传输将要完成时才能进行。从图11中可以看出gpio接口共有16个,但多个功能操作所用gpio接口都复用了databus[0:7],当多个功能同时操作所用gpio接口时,则复用的databus[0:7]共8个数据的传输会出现不同功能数据输入与输出数据冲突(竞争现象),而且dsp的gpio数据传输和其他复用功能的gpio的时序都与fpga有关,但fpga不大可能将多种功能同时操作时的数据复用gpio的时序整理得没有任何问题,因为不同功能操作不是固定时间的,而是随机的,只有这样才能使产品的实用性得到体现和应用。
[0091]
主控系统在多重复用gpio的情况下,就要求fpga和dsp在软件设计方面需要对两者之间的指令、数据交互时的时序控制非常精准,否则就会出现gpio接口在指令、数据交互时出现收发不正确、乱码和误码率比较高的情况,从而造成功能不正常和操作不正确的情况。
[0092]
图12为mcbsp数据传输时序图,从图中看到mcbsp数据传输时序要求也是比较精准的,但fpga通过mcbsp传输数据时按照mcbsp时序传输数据,不用再考虑数据可能发生的多重复用冲突情况。同时也可以使fpga对灯控制、串口和并口功能的数据传输时序能更好的控制和减少出现数据冲突的情况。
[0093]
dsp处理模块
[0094]
dsp的rapid io时钟为125mhz,由板载晶振单独提供,为了保证两片dsp的rapidio通信同步,采用一片晶振加一个时钟分配器的组合方式,为两片dsp的rapidio模块提供同步时钟。时钟芯片采用analog公司的ad9522-2。ad9522-2可以分配输出多路时钟,片内集成的压控振荡器(vco)频率范围为2.02ghz至2.335ghz,并且片内集成锁相环(pll)。外部的参数配置可以使用adisimclk进行配置后获取。ad9522-2具有以下特点:1、ad9522串行接口支持spi和i2c端口。封装内eeprom可以通过串行接口进行编程,存储用于上电和芯片复位的用户定义寄存器设置。2、ad9522具有12路lvds输出(分为四组)。任一路800mhz lvds输出均可重新配置为两路250mhz cmos输出。3、每组输出均具有一个分频器,其分频比(从1至32)和相位(粗调延迟)均可以设置。4、ad9522提供64引脚lfcsp封装,可以采用3.3v单电源供电。外部vco的工作电压最高可达5.5v。采用ad9522-2进行设计,可以对内部和外部提供的参考时钟进行切换,并且能够提供多种输出。其12路输出可以配置成12路lvds输出,每一路lvds输出可以设置成两路不高于800mhz的cmos输出。本发明中其设计框图如图13所示。
[0095]
tms320c6455是ti的6000系类中一款高性能、定点数字信号处理器,最高工作频率为1.2ghz。片内除了高性能的c64x+数字信号处理器内核外,还具有丰富的外设资源,如用
于片级互联的rapid io接口、千兆以太网控制器、pci接口、ddr2接口、64位的emif接口、i2c接口、mcbsp接口、jtag仿真接口等。板卡采用2片tms320c6455进行协议解析及数据处理,两片dsp采用rapid io接口互联,以实现两个dsp之间高速的数据交互功能,其双向传输速率最高可达3.125gbps。同时每片dsp提供对外rapid io接口2路,可与其他模块进行rapidio总线数据通信。dsp通过ddr2接口直接扩展2片ddr2存储,用来存储数据和程序,两片ddr2采用数据线并联方式,形成32位存储位宽,有效提高系统的性能。每片dsp会单独外挂一片flash,用来存储程序代码,系统上电后,dsp通过二次加载将代码加载至dsp。dsp的emif总线连接至fpga,实现资源共享,扩展外围接口。其连接框图如图14所示。
[0096]
本发明中dsp外部扩展一个flash,用于dsp的程序加载。tms320c6455的加载方式主要有以下几种:不加载、flash加载、主机(hpi/pci接口)加载、srio加载、i2c加载。在本发明中,dsp的加载我们采用flash加载的方式,在cpu复位信号撤销后,cpu仍保持复位状态,此时位于外部ce3空间的flash中1kb空间通过edma拷贝到地址0处。为了获得较高的运行速度,需要将flash中的代码搬移到ram中进行运行。一般应用程序都会超过1kb,因此我们需要在这1k的程序中完成二次搬移的功能,完成程序引导功能,将实际的程序搬移到dsp的ram中进行运行。tms320c6455支持通过emifa的ce3的8位flash的加载方式。flash读取的操作比较简单,但是在擦除和写入时候需要特定的时序和操作命令。flash一个读写的周期大约70ns,属于慢速设备,直接将程序存放在flash中运行比较慢,极大的降低了系统性能。因此采用tms320c6455的加载功能,利用内部自带的bootloader将flash的程序搬移到ram中运行,保证系统的启动时间。flash中的程序被映射到90000000h的内存空间进行运行,有效的减小了dsp的加载时间。本发明中flash采用spansion公司的s29gl512n,由于tms320c6455片外flash加载的要求,flash采用8位emif总线的配置方式连接到dsp的emifa的ce3空间,flash的低8位数据线与dsp的emifa的低8位数据线连接,dsp与flash的连接方式如图15所示。flash的高地址位与fpga连接,fpga通过判断dsp的emifa总线地址来确定flash的高位地址。
[0097]
fpga处理模块
[0098]
高速lvds电路主要通过芯片ds92lv16来实现其相应的功能。本发明中每片fpga中均利用2片ds92lv16实现2收1发的数据传输,由于lvds作为电流形式的数据传输,接收端接100欧的匹配电阻用于形成电压用于接收端的信号识别。电路框图如图16所示。
[0099]
实现fpga的数据配置方法有很多,基本类型为以下四种:
①
jtag方式加载;
②
主串方式加载;
③
从串方式加载;
④
并行方式加载。根据器件类型和应用场合,本板卡采用jtag加载和并行加载方式两种。前期调试阶段,主要采用jtag加载方式,开发完成后,采用并行加载方式,并行加载方式采用一片512m字节flash存储fpga代码,系统上电后,由cpld控制加载时序,从flash内读取代码,送入fpga,完成fpga的加载,fpga加载实现框图如图17所示,将fpga加载配置需要的所有数据线、地址线、控制线连接到cpld上,cpld在上电阶段,模拟并行加载配置芯片的作用,从flash中读取配置数据,根据时序要求给fpga相应的数据和控制信号,完成fpga的配置。
[0100]
开关量cpu等处理电路设计
[0101]
开关量信号条调理电路主要完成了对执行机构部件输入的24v、5v、悬空等类型的开关量信号的输出功能。通过控制继电器切换输出开关量信号。输出信号包括多功能载板
调理后的+24v电源、悬空状态或接地,实现24v与接地、悬空与接地、悬空与5v输出的切换。开关量信号条调理电路如图18所示。
[0102]
模拟cpu等处理电路设计
[0103]
外部输入的模拟信号在检测电缆传输过程中会引入一些高频噪声,这些噪声信号可能会引起检测信号的误判,严重时还可能影响整个cpu+dsp模块的工作。输入信号先经由tvs管的保护作用,其后跟分压、低通滤波电路,可有效抑制高频干扰信号。输入信号含有杂波都会对采集到的信号解析造成影响,可根据检测信号的频率选取滤波电容值,通过调整反馈电阻调整电路的放大增益。adcpu等处理电路如图19所示。
[0104]
da信号主要用于模拟传感器给执行机构部件输入信号,因执行机构部件在解算精度功能时,对传感器的输入零位要求很高,为了避免因数字地与模拟地间的串扰造成模拟量输出信号的微小变化,造成检测功能的不稳定,采用多功能采集板卡输出的模拟量信号,首先经过限流电阻、低通滤波到运放进行滤波处理,再经由运放电路进行跟随调理,之后将调理后的信号输入至单端转差分运放,实现模拟量输出为差分输出方式,差分输出方式可以有效的解决此方面的问题,同时,为了确保给执行机构部件输入的模拟信号保持在
±
10v范围内,在差分运放输出端设计tvs管保护电路,将输出信号幅值钳位在
±
10v范围内。输出cpu等处理电路如图20所示。
[0105]
rs422通信电路设计
[0106]
rs422通信电路硬件设计采用基于usb接口的ft4232芯片及外围接口电路芯片sp491e进行设计,实现测试工装对mic/io板卡的rs485/422资源通信接口,其硬件设计原理,如图21所示。
[0107]
软件设计
[0108]
装备维修训练系统软件主要包括运行在维修训练装置处理终端的装备状态分析与管理软件和运行在装备维修训练系统中的嵌入式数据采集与处理软件。其软件组成如图22所示。
[0109]
装备维修训练系统软件整体采用上位机(即装备状态分析与管理软件)和下位机(嵌入式数据采集与处理软件)两个层次,层次之间和各层次功能模块之间的关系和总体结构如图23所示。
[0110]
嵌入式数据采集与处理软件通过控制嵌入式融合设备硬件实现执行机构装备上所需运行工作参数的状态信息的数据采集、数据转换、数据传输、数据分析、数据分类、数据存储、信息编码等功能,实现故障判断、故障报警、故障指示等功能。
[0111]
嵌入式数据采集与处理软件包括嵌入式操作系统和嵌入式应用软件。嵌入式操作系统选用dsp内核,根据功能要求进行定制;嵌入式应用软件负责管理和控制设备硬件,实现数据采集、数据编码与处理、数据分析、数据存储、数据通讯、故障预警、数据导出等功能。嵌入式处理软件的功能结构如图24所示。
[0112]
装备状态分析与管理软件主要包括装备管理模块、数据通讯模块、运行状态监控、数据分析模块、故障预测模块、数据管理模块等,其功能模块组成如图25所示。
[0113]
装备状态分析与管理软件模块之间的功能相对独立(耦合性低),模块之间通过消息传递或者以数据库为媒介建立联系,互相配合完成装备工作状态数据的技术分析、故障诊断和预测等功能,这样给软件的可维护性、可扩展性、可配置性等均带来很大的方便。软
件模块之间的逻辑关系如图26所示。
[0114]
嵌入式处理软件是运行于装备维修训练系统中的应用程序,可与终端管理模块通过网口进行配置数据交互。
[0115]
在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本发明的实施例可以在没有这些具体细节的情况下实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
[0116]
类似地,应当理解,为了精简本公开并帮助理解各个发明方面中的一个或多个,在上面对本发明的示例性实施例的描述中,本发明的各个特征有时被一起分组到单个实施例、图、或者对其的描述中。然而,并不应将该公开的方法解释成反映如下意图:即所要求保护的本发明要求比在每个权利要求中所明确记载的特征更多的特征。更确切地说,如下面的权利要求书所反映的那样,发明方面在于少于前面公开的单个实施例的所有特征。因此,遵循具体实施方式的权利要求书由此明确地并入该具体实施方式,其中每个权利要求本身都作为本发明的单独实施例。
[0117]
应该注意的是上述实施例对本发明进行说明而不是对本发明进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1