一种虚拟仿真教学系统的智能工厂模拟装置的制作方法
1.本发明涉及机电一体化设备仿真教学技术领域,具体为一种虚拟仿真教学系统的智能工厂模拟装置。
背景技术:
2.传统技术的实现方案是根据智能工厂,开发出该生产线的缩略版教学仪器,可以再现现代工业自动化的运行场景,其中包括电气自动化技术,工业机器人技术,网络通讯技术等,在实训设备上进行教学,目前的教学系统中对于智能工厂模拟装置大多落后现阶段工厂的产线几个版本,导致学员学习后存在技术落后,进入工作仍然需要化费大量时间去学习,仍然缺乏数据经验以及实操经验。
3.因此,我们提供一种虚拟仿真教学系统的智能工厂模拟装置,通过客户端连接外部plc或者虚拟机器人控制器、示教器进行数据交互,同时具有真实设备的相同配置和各种控制信号,可以练习plc编程、机器人编程、触摸屏编程和完成相应的实训任务,并通过这些程序驱动虚拟场景中的设备运行,也可以与真实设备进行联机调试,有利于大大提高实训的效率,同时可对多种机电学科完成实训目的,同时也降低人身安全与设备安全事故。
技术实现要素:
4.本发明的目的在于提供一种虚拟仿真教学系统的智能工厂模拟装置,解决了背景技术中所提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种虚拟仿真教学系统的智能工厂模拟装置,包括颗粒上料单元、加盖拧盖单元、检测分拣单元、6轴机器人单元和成品入仓单元,通过仿真教学系统编写达到与实物设备相同的运行逻辑与功能,包括颗粒上料单元、加盖拧盖单元、检测分拣单元、6轴机器人单元和成品入仓单元等,通过由开发的python脚本控制,通过传感器信号产生由软件内部程序执行并传输给相应的布尔型信号数据,在仿真教学系统的虚拟场景内设计完动作、信号点后,再连接plc、机器人虚拟示教器、触摸屏,绑定对应的io点后可通过数据交换使虚拟场景做出相应的动作并反馈给plc、机器人虚拟示教器、触摸屏。
6.作为本发明的一种优选实施方式,颗粒上料单元通过上料输送皮带逐个将空瓶输送到主输送带;同时循环选料机构将料筒内的物料推出,对颗粒物料根据颜色进行分拣,当空瓶到达填装位后,顶瓶部件将空瓶固定,使得主皮带停止;上料填装模块将分拣到位的颗粒物料吸取放到空瓶内;瓶子内物料到达设定的颗粒数量后,顶瓶装置松开,主皮带启动,将瓶子输送到下一个工位。
7.作为本发明的一种优选实施方式,瓶子被输送到加盖拧盖单元内,通过加盖定位装夹机构将瓶子固定,再通过加盖机构启动加盖流程,将盖子加到瓶子上;加上盖子的瓶子继续被送往拧盖机构,通过加上盖子的瓶子移动至拧盖机构下方,拧盖定位装夹机构将瓶子固定,进而拧盖机构启动,将瓶盖拧紧。
8.作为本发明的一种优选实施方式,由瓶盖拧紧的瓶子运送到检测分拣单元,其经过一个传感器启动龙门检测机构,回归反射传感器检测瓶盖的拧紧情况,龙门机构检测瓶子内部颗粒是否符合要求,对拧盖与颗粒均合格的瓶子进行瓶盖颜色判别区分,将拧盖或颗粒不合格的瓶子由分拣机构推送到不良品区;拧盖与颗粒均合格的瓶子被输送到主输送带末端,等待机器人搬运。
9.作为本发明的一种优选实施方式,通过两个升降台模块分别存储包装盒和包装盒盖,盒底升降机构将包装盒推向物料台上,通过6轴机器人将瓶子抓取放入物料台上的包装盒内,包装盒4个工位放满瓶子后,6轴机器人从盒盖升降机构上吸取盒盖,盖在包装盒上,6轴机器人将标签盘上的标签吸取贴到盖上,贴完4个标签等待成品入仓单元入库。
10.作为本发明的一种优选实施方式,成品入仓单元内堆垛机模块把机器人单元物料台上的包装盒体吸取出来,然后按要求依次放入仓储相应仓位。
11.与现有技术相比,本发明的有益效果如下:
12.1.本发明通过客户端连接外部plc或者虚拟机器人控制器、示教器进行数据交互,同时具有真实设备的相同配置和各种控制信号,通过该系统学员可以练习plc编程、机器人编程、触摸屏编程和完成相应的实训任务,并通过这些程序驱动虚拟场景中的设备运行,也可以与真实设备进行联机调试。
13.2.本发明通过数据线将plc与电脑进行连接,学员编写不同的程序输入plc,通过plc驱动虚拟设备按照学员设想的动作流程进行工作,学员可以自己设计不同的工作流程并编写不同的配套plc程序,其输出对应的动作流程视频文件,虚拟场景与实物设备数据交互,同步运行,虚拟场景内实现实训设备主要机构机的械拆解、安装,编写触摸屏程序连接plc,可远程监控、操作虚拟场景,使用机器人虚拟示教器控制虚拟场景内的机器人,有利于大大提高实训的效率,同时可对多种机电学科完成实训目的,同时也降低人身安全与设备安全事故。
附图说明
14.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
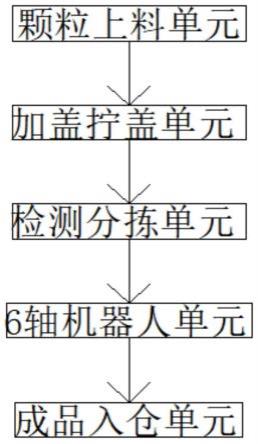
15.图1为本发明一种虚拟仿真教学系统的智能工厂模拟装置的架构示意图;
具体实施方式
16.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
17.请参阅图1,本发明提供一种技术方案:一种虚拟仿真教学系统的智能工厂模拟装置,包括颗粒上料单元、加盖拧盖单元、检测分拣单元、6轴机器人单元和成品入仓单元,通过仿真教学系统编写达到与实物设备相同的运行逻辑与功能,包括颗粒上料单元、加盖拧盖单元、检测分拣单元、6轴机器人单元和成品入仓单元等,通过由开发的python脚本控制,通过传感器信号产生由软件内部程序执行并传输给相应的布尔型信号数据,在仿真教学系统的虚拟场景内设计完动作、信号点后,再连接plc、机器人虚拟示教器、触摸屏,绑定对应的io点后可通过数据交换使虚拟场景做出相应的动作并反馈给plc、机器人虚拟示教器、触
摸屏。
18.本实施例中,颗粒上料单元通过上料输送皮带逐个将空瓶输送到主输送带;同时循环选料机构将料筒内的物料推出,对颗粒物料根据颜色进行分拣,当空瓶到达填装位后,顶瓶部件将空瓶固定,使得主皮带停止;上料填装模块将分拣到位的颗粒物料吸取放到空瓶内;瓶子内物料到达设定的颗粒数量后,顶瓶装置松开,主皮带启动,将瓶子输送到下一个工位。
19.本实施例中,瓶子被输送到加盖拧盖单元内,通过加盖定位装夹机构将瓶子固定,再通过加盖机构启动加盖流程,将盖子加到瓶子上;加上盖子的瓶子继续被送往拧盖机构,通过加上盖子的瓶子移动至拧盖机构下方,拧盖定位装夹机构将瓶子固定,进而拧盖机构启动,将瓶盖拧紧。
20.本实施例中,由瓶盖拧紧的瓶子运送到检测分拣单元,其经过一个传感器启动龙门检测机构,回归反射传感器检测瓶盖的拧紧情况,龙门机构检测瓶子内部颗粒是否符合要求,对拧盖与颗粒均合格的瓶子进行瓶盖颜色判别区分,将拧盖或颗粒不合格的瓶子由分拣机构推送到不良品区;拧盖与颗粒均合格的瓶子被输送到主输送带末端,等待机器人搬运。
21.本实施例中,通过两个升降台模块分别存储包装盒和包装盒盖,盒底升降机构将包装盒推向物料台上,通过6轴机器人将瓶子抓取放入物料台上的包装盒内,包装盒4个工位放满瓶子后,6轴机器人从盒盖升降机构上吸取盒盖,盖在包装盒上,6轴机器人将标签盘上的标签吸取贴到盖上,贴完4个标签等待成品入仓单元入库。
22.本实施例中,成品入仓单元内堆垛机模块把机器人单元物料台上的包装盒体吸取出来,然后按要求依次放入仓储相应仓位。
23.具体实施例
24.通过上料输送皮带逐个将空瓶输送到主输送带1;同时循环选料机构将料筒内的物料推出,对颗粒物料根据颜色进行分拣;当空瓶到达填装位后,顶瓶部件将空瓶固定,且主输送带1停止,上料填装模块将分拣到位的颗粒物料吸取放到空瓶内,瓶子内物料到达设定的颗粒数量后,顶瓶装置松开,主输送带1启动,将瓶子输送到下一个工位,其中此单元可以设定多样化的填装方式,可从物料颜色(2种)、颗粒数量(最多4粒)进行不同的组合,产生8种填装方式。
25.由主输送带1运送到主输送带2,瓶子被输送到加盖机构下,通过加盖定位装夹机构将瓶子固定,再通过加盖机构启动加盖流程,将盖子加到瓶子上;加上盖子的瓶子继续被送往拧盖机构,通过加上盖子的瓶子移动至拧盖机构下方,拧盖定位装夹机构将瓶子固定,进而拧盖机构启动,将瓶盖拧紧。
26.由主输送带2运送到主输送带3,其经过一个传感器启动龙门检测机构,回归反射传感器检测瓶盖的拧紧情况,龙门机构检测瓶子内部颗粒是否符合要求,对拧盖与颗粒均合格的瓶子进行瓶盖颜色判别区分,将拧盖或颗粒不合格的瓶子由分拣机构推送到不良品区,拧盖与颗粒均合格的瓶子被输送到主输送带3末端,等待机器人搬运。
27.通过两个升降台模块分别存储包装盒和包装盒盖,盒底升降机构将包装盒推向物料台上,通过6轴机器人将瓶子抓取放入物料台上的包装盒内,包装盒4个工位放满瓶子后,6轴机器人从盒盖升降机构上吸取盒盖,盖在包装盒上,6轴机器人将标签盘上的标签吸取
贴到盖上,贴完4个标签等待成品入仓单元入库。
28.在通过堆垛机模块把机器人单元物料台上的包装盒体吸取出来,然后按要求依次放入仓储相应仓位,仓库可参考,仓库6个仓位,每个仓位均安装一个检测传感器,通过python脚本进行判断执行;
29.其中堆垛机构水平轴为一个转盘机构,垂直机构为涡轮丝杆升降机构,均由精密伺服电机进行高精度控制。
30.其中教学内容和目的为:通过数据线将plc与电脑进行连接,学员编写不同的程序输入plc,通过plc驱动虚拟设备按照学员设想的动作流程进行工作,学员可以自己设计不同的工作流程并编写不同的配套plc程序,以此达到学员plc编程实训的教学效果。
31.在通过输出对应的动作流程视频文件,虚拟场景与实物设备数据交互,同步运行;达到设备虚拟调试和维护的实训教学目的。
32.在虚拟场景内实现实训设备主要机构机的械拆解、安装,达到机械装配的实训教学目的。
33.在编写触摸屏程序连接plc,可远程监控、操作虚拟场景,达到触摸屏编程开发的实训教学目的。
34.使用机器人虚拟示教器控制虚拟场景内的机器人,达到对机器人编程开发的实训教学目的。
35.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
36.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1