一种基于GPU加速的多传感器融合的SLAM方法
一种基于gpu加速的多传感器融合的slam方法
技术领域
1.本发明涉及机器人即时定位与地图构建技术领域,更具体的,一种基于gpu加速的多传感器融合的slam方法。
背景技术:
2.即时定位与地图构建技术(slam:simultaneous localization and mapping)是机器人实现自主导航的关键性技术,近年来,多传感器融合的slam方法被持续的关注和研究,并且得到了广泛的应用。虽然多传感器融合提高了slam技术的稳定性、精确性和鲁棒性,但也意味着随着数据量的增加,要求更强大的计算机算力,然而,事实是传感器功能与系统的实际信息处理功能之间存在脱节。近年来,图形图像处理技术的进一步发展,对运算速度有了更高的要求,图形处理器gpu凭借强大的计算能力逐渐引起各种技术领域的关注。slam技术的实时性和庞大的数据量之间的矛盾亟待解决,gpu的发展为此提供了契合点。
3.slam技术非常依赖状态估计的准确性和高效性,所以前端数据匹配至关重要,如果在这部分能够准确高效的完成,对于地图的精确性以及整体的实时性提供了重要的保障。除了前端,后端的位姿优化和回环检测也起到非常重要的作用,尤其是在特征不明显或者高度重复的场景,不仅对传感器捕获信息完整丰富性有很高的要求,而且回环检测的准确高效性也值得进一步提高,能够及时捕获回环信息,更新准确的状态信息对于slam具有重要意义。现有的技术只能实现某一方面的加速,未能将两部分同时加速,并且融合方式也有不足之处,基于因子图优化的融合方法具有更精确的机器人状态,是目前多传感器融合的研究趋势。所以,如何加速基于因子图优化的多传感器融合的slam技术这两方面的运行速度,以满足更高层次的应用需求,是一个值得研究的方向。
技术实现要素:
4.为了使得slam技术准确实时的完成,本发明提供了一种基于gpu加速的多传感器融合slam方法,其特征在于,包括基于gpu加速的激光雷达/imu紧耦合前端里程计模块、基于因子图的后端优化模块、点云地图创建模块、基于gpu加速的视觉回环检测模块:所述的基于gpu加速的激光雷达/imu紧耦合前端里程计模块,其中gpu加速的点云匹配步骤如下:步骤1:降采样:主机端(cpu)读取激光雷达数据,对雷达点云数据进行体素网格下采样操作,将所有点云划分在不同的体素中,将距离网格较远和明显错误的点剔除;步骤2:运动补偿:主机端(cpu)使用imu运动预测对雷达帧内运动产生的点云失真进行运动补偿,将每个点云投影到激光雷达帧的起始时刻;步骤3:体素化目标点:主机端(cpu)设置上一帧点云数据为目标点云并存储在容器中,使用kd-tree寻找目标点半径为r范围内的点云存储在容器中,将目标点云从主机端(cpu)复制到设备端(gpu),每个目标点云对应一个体素索引,初始化均值和协方差,(非初始化跳过此步骤);
步骤4:体素化源点:主机端(cpu)设置当前帧点云数据为源点云并存储在容器中,使用kd-tree寻找目标点半径r范围内的点云存储在容器中,将源点云从主机端(cpu)复制到设备端(gpu),每个源点云对应一个体素索引,初始化均值和协方差;步骤5:计算均值和协方差:主机端(cpu)根据设备条件和点云数量设计核函数,设定内核宽度,线程数量等于体素数量,驱动设备端(gpu)根据索引将点云建模成高斯分布,计算源点云和目标点云的均值和协方差;步骤6:计算相对变换:设备端(gpu)计算体素之间的对应关系,采用最大似然估计求得最大后验概率,使用高斯牛顿法迭代优化,使用体素中的点数对误差项进行加权,根据体素的协方差矩阵得到信息矩阵,迭代直到目标代价函数收敛,得到相应的变换矩阵t,将变换矩阵t传输到主机端(cpu);步骤7:更新点云:将当前帧点云设置为目标点云,等待下一次计算。
5.所述的基于因子图的后端优化模块,构建包括imu预积分因子,激光雷达匹配成本因子、视觉回环因子的滑动窗口。当新的传感器状态添加进来时,使用固定滞后平滑方法优化因子图并将更新的位姿状态反馈到基于gpu加速的激光雷达/imu紧耦合前端里程计模块用于修正,边缘化的关键帧用来构建点云地图。
6.所述的基于gpu加速的视觉回环检测模块,首先进行基于gpu加速的fast角点特征提取,随后进行字典查询、相似性评分、组匹配、时间合理性校验、结构一致性校验。当确定回环后,将回环因子加入基于因子图的后端优化模块执行一次全局优化。
7.可选的,所述基于因子图的后端优化模块中,构建的滑动窗口因子图中的传感器状态节点大小固定为20个。优化因子之间的约束为:被边缘化的关键帧与最新帧之间的约束为一元边、其他因子如imu预积分因子、激光雷达匹配成本因子、视觉回环因子为二元边。可选的,所述基于gpu加速的视觉回环检测模块,其中gpu加速的 fast角点特征提取的步骤如下:步骤a:获取图像金字塔:主机端(cpu)对相机输入图像进行二次采样获取图像金字塔;步骤b:分割成矩形单元:主机端(cpu)对每种分辨率图像划分成固定宽度和高度的矩形单元,并拷贝到设备端(gpu),每个矩形块对应一个线程块;步骤c:确定感兴趣区域:设备端(gpu)在warp中计算fast角点,将选中的像素点与其周围领域内足够多的像素点进行亮度比较,以此来确定感兴趣区域(roi);步骤d:角响应函数评估:对于每个矩形块中感兴趣区域(roi)的每个像素,设备端(gpu)先进行粗角响应函数(ccrf)评估,然后进行角响应函数(crf)评估;步骤e:非极大值抑制:设备端(gpu)将角点响应图划分为规则的单元格网格,每个单元分配一个线程块,使用多个warp处理一个单元, 并进行非极大值抑制;步骤f:cpu读取fast角点:线程块中所有warp将最大结果(crf分数和像素位置)写入指定的共享内存中,块中的第一个线程为每个单元选择最大结果并将其写入全局内存,即完成整张图的fast角点检测,将结果传输到主机端(cpu)。
8.可选的,所述基于gpu加速的视觉回环检测模块中基于gpu加速的 fast角点特征提取步骤c在设备端(gpu)的warp中计算fast角点,首先选择该像素点半径为3 的16个像素点,然后将16个像素点比较的结果存储为一个位数组,作为查找表的索引。计算所有可能的
结果为种且都为二进制,存储在位(8kb)中,使用4字节整数存储这些结果,每个整数存储32个组合。
9.可选的,所述基于gpu加速的视觉回环检测模块中基于gpu加速的 fast角点特征提取步骤e的使用多个warp进行非极大值抑制,其步骤如下:步骤(1): warp读取单元格的第一行,每个线程获取1个像素的响应;步骤(2):整个warp开始摩尔邻域抑制,每个线程验证其响应是否在摩尔邻域中达到最大值,非最大值线程将抑制其响应;步骤(3):warp移动到下一行,重复步骤1、2的操作,处理完整个单元格网格。块中的第一个线程为该单元选择最大结果并将其写入全局内存,完成该单元的处理。
10.总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果(1)本发明提出一种基于gpu加速的3d激光雷达、imu、视觉多传感器融合的slam方法,激光雷达和imu在前后端实现紧耦合,在回环检测部分采用了视觉传感器实现,视觉图像纹理更为丰富,实现回环的方式相比于激光雷达更为简单、快速,而且对于特征不明显或者特征重复的场景,回环检测能力更强。将这三种传感器有效的结合,既避免了三种传感器数据紧耦合的复杂度,又达到了相当的效果;(2)采用了基于体素的gicp(vgicp)匹配成本因子,与常用的基于特征的线和平面点匹配方式相比,该方法使用了更多的点来计算配准误差,使得匹配精度更高,并且利用gpu的并行结构加速实现,提高了点云匹配的实时性;(3)使用视觉传感器做回环检测,特征检测部分部署在gpu上进行加速实现,认定为回环后,由激光雷达关键帧再次确认,达到了准确且快速的回环检测需求。
附图说明
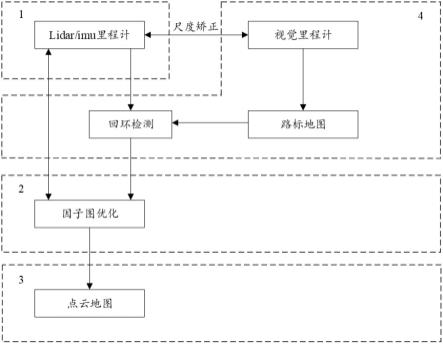
11.图1是本发明一种基于gpu加速的多传感器融合的slam方法的总体框图。
12.图2是本发明一种基于gpu加速的多传感器融合的slam方法的激光雷达点云匹配加速策略图。
13.图3是本发明一种基于gpu加速的多传感器融合的slam方法的滑动窗口因子图。
14.图4是本发明一种基于gpu加速的多传感器融合的slam方法的视觉回环检测加速策略图。
15.图5是本发明一种基于gpu加速的多传感器融合的slam方法的视觉回环检测流程图。
具体实施方式
16.为使本发明的目的、优点以及技术方案更加清晰具体,下面结合本发明具体的实施例和相应的附图做进一步详细说明。
17.图1是本发明一种基于gpu加速的多传感器融合的slam方法的一个实施例的总体框图,所述传感器包括3d激光雷达、imu、单目相机,所述方法包括基于gpu加速的激光雷达/imu紧耦合的前端里程计模块、基于因子图的后端优化模块、创建点云地图模块以及基于gpu加速的视觉回环检测模块。
18.一种基于gpu加速的多传感器融合的slam方法,以imu为body坐标系,定义传感器状态为如下形式:(1)其中和是imu线加速度和角加速度噪声。
19.图2是本发明一种基于gpu加速的多传感器融合的slam方法的激光雷达点云匹配加速策略图, 包含以下步骤:步骤1:降采样:读取激光雷达数据,对雷达点云数据进行体素网格下采样操作,具体为设定固定大小的体素容器(本实施例中选取:0.1m*0.1m*0.1m),将所有点云划分在不同的体素中,将距离网格较远和明显错误的点剔除;步骤2:运动补偿:使用imu运动预测对雷达帧内运动产生的点云失真进行运动补偿,首先积分一个激光帧扫描起始和结束时刻之间的imu测量,然后利用每个激光测量点的时间戳对imu积分结果进行线性插值,从而将每个点投影到激光帧的起始时刻,完成运动补偿,imu在未来时刻的速度、位置、旋转计算如下:(2)其中和是imu测量中的白噪声imu预积分获取雷达两个时间戳之间的相对运动,得到第i时刻与第j时刻之间的速度测量、位置测量和旋转测量计算如下:(3)其中,和都是预积分过程中的白噪声步骤3:体素化目标点:主机端(cpu)设置上一帧点云数据为目标点云并存储在容器中,使用kd-tree寻找目标点半径为r范围内的点云存储在容器中,将目标点云从主机端(cpu)复制到设备端(gpu),每个目标点云对应一个体素索引,初始化均值和协方差,(非初始化跳过此步骤);步骤4:体素化源点:主机端(cpu)设置当前帧点云数据为源点云并存储在容器中,使用kd-tree寻找目标点半径r范围内的点云存储在容器中,将源点云从主机端(cpu)复制到设备端(gpu),每个源点云对应一个体素索引,初始化均值和协方差;步骤5:计算均值和协方差:主机端(cpu)根据设备条件和点云数量设计核函数,设定内核宽度,线程数量等于体素数量,驱动设备端(gpu)根据索引将点云建模成高斯分布,对每个输入点云建模成高斯分布,并计算均值和协方差,其中协方差由该点云半径r范围内的k个相邻点计算得出;
步骤6:计算相对变换:设备端(gpu)计算体素之间的对应关系,计算源点与多个目标点半径r范围内邻点之间的距离,距离残差如式(4)所示,采用最大似然估计求得最大后验概率,使用高斯牛顿法迭代优化,使用体素中的点数对误差项进行加权,根据体素的协方差矩阵得到信息矩阵,迭代直到目标代价函数收敛,找到置信度最高的变换矩阵,其代价函数如式(5)所示,最后将变换矩阵传输到主机端(cpu);(4)其中s表示原点,t表示目标点,j表示多个目标点的数量(5)其中i表示邻近点的数量。
20.图 3是本发明一种基于gpu加速的多传感器融合的slam方法的后端滑动窗口因子图,包括imu预积分因子、激光雷达匹配成本因子、视觉回环因子。imu预积分因子通过(3)式给出,激光雷达匹配成本因子通过(5)式给出,视觉回环因子通过(6)式给出。具体地,构建固定窗口大小为20个状态节点的因子图,优化因子之间的约束为:被边缘化的关键帧与最新帧之间的约束为一元边、其他因子如imu预积分因子、激光雷达匹配成本因子、视觉回环因子为二元边。当新的传感器状态添加进来时,使用固定滞后平滑方法优化因子图并边缘化旧帧,通过关键帧机制管理边缘化帧。关键帧的空间分布良好并且与最新帧有足够的重叠。设置重叠率阈值来管理关键帧,重叠率小于阈值(本实施例中选取90%),则设为关键帧。否则丢弃该帧。因子图边缘化的关键帧,作为传感器状态的初始估计送到点云地图创建模块,点云地图创建模块不断接受边缘化的关键帧,并且得到关键帧之间的变换关系,拼接为全局一致的点云地图。
21.图4是一种基于gpu加速的多传感器融合的slam方法的视觉回环检测加速策略图。基于gpu加速的视觉回环检测模块,加速部分为fast角点特征检测,具体步骤为:步骤a:获取图像金字塔:主机端(cpu)对相机输入图像进行二次采样获取图像金字塔;步骤b:分割成矩形单元:主机端(cpu)对每种分辨率图像划分成固定宽度和高度的矩形单元,并拷贝到设备端(gpu),每个矩形块对应一个线程块;步骤c:确定感兴趣区域:设备端(gpu)在warp中计算fast角点,将选中的像素点与其周围半径为3 的16个像素点进行亮度比较,然后将16个像素点亮度比较结果存储为一个位数组,作为查找表的索引。计算所有可能的结果为种且都为二进制,将其存储在位
(8kb)中,使用4字节整数存储这些结果,每个整数存储32个组合。该索引命中在缓存表中,以此来确定感兴趣区域(roi);步骤d:角响应函数评估:对于每个矩形块中感兴趣区域(roi)的每个像素,设备端(gpu)先进行粗角响应函数(ccrf)评估,然后进行角响应函数(crf)评估;步骤e:非极大值抑制:设备端(gpu)将角点响应图划分为规则的单元格网格,每个单元分配一个线程块,使用多个warp处理一个单元, 进行非极大值抑制,首先warp读取单元格的第一行,每个线程获取1个像素的响应,然后整个warp开始摩尔邻域抑制,每个线程验证其响应是否在摩尔邻域中达到最大值,非最大值线程将抑制其响应,接着warp移动到下一行,重复步骤1、2的操作,处理完整个单元格网格;步骤f:cpu读取fast角点:线程块中所有warp将最大结果(crf分数和像素位置)写入指定的共享内存中,块中的第一个线程为每个单元选择最大结果并将其写入全局内存,即完成整张图的fast角点检测,将结果传输到主机端(cpu)。
22.图5是一种基于gpu加速的多传感器融合的slam方法的视觉回环检测流程图。实现视觉回环检测首先构建视觉里程计,视觉里程计通过特征点法估计变换矩阵,尺度通过激光雷达每隔20帧矫正一次。回环检测模块由视觉基于词袋模式进行检测。基于gpu加速的视觉回环检测的具体步骤为:步骤1:特征提取:特征提取如图4一种基于gpu加速的多传感器融合的slam方法的视觉回环检测加速策略步骤所述,提取到fast特征后将结果传输到主机端(cpu),计算特征点的brief 描述子转换为单词(词袋字典树已创建完成),确定当前帧的单词,形成当前帧词袋向量;步骤2:字典查询:找出与当前帧相同单词的关键帧;步骤3:相似性评分:比较词袋向量之间的差异,计算公式如式(6)所示,两帧词袋向量之间的差异是否小于阈值(本实施例中选取90%),如果小于阈值,则跳转到步骤7;(6)其中,表示当前帧(源)词袋向量,表示目标词袋向量,n表示特征数量步骤4:组匹配:将时间相近的帧合成一个组别,匹配时只对其中一个进行匹配。如果不通过组匹配,则跳转到步骤7;步骤5:时间合理性校验:对于检测到的一个组匹配,计算在此之前连续k个组匹配都成立,将评分最高的组匹配视作回环。如果不通过时间合理性校验,则跳转到步骤7;步骤6:结构性一致性校验:对于词袋向量相同的当前帧和回环帧,进一步确认词袋向量在结构顺序上的一致性。如果不通过结构一致性校验,则跳转到步骤7;步骤7:结束回环,若检测到回环,输出回环帧,否则,结束回环;检测到回环后,再由相同时间戳的激光雷达关键帧进一步确认。确认为回环后,将回环因子添加到后端因子图执行一次全局优化,同时优化传感器位姿状态和点云地图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1