一种量化介入手术操作行为的训练系统及其方法
1.本发明专利涉及用于介入手术操作训练的医疗领域,尤其涉及一种可量化介入手术操作行为的训练系统及其方法。
背景技术:
2.随着血管类疾病成为威胁人类身心健康的首要病疾,介入手术也逐渐成为治疗血管疾病的主要治疗方式之一、在借助医学影像技术的基础上,通过利用微创的方式将介入器械送至目标病灶位置。介入手术具有创伤小,术后恢复快等优势。对于年轻医生而言,在正式进入临床手术需要经过大量的手术训练。而手术训练装置可以很好的提供手术训练的环境。
3.但是介入手术的操作缺乏三维视野,无法获取介入器械的空间位置,其操作依赖往往医生经验,医生学习周期也较长。此外,医生在操作时会存在直觉,(旋转,推,拉等手部动作信息)以及器械运动学等多元信息。因此量化术者在手术执行中的操作行为、经验对评估操作行为与手术训练具有重要的意义。
技术实现要素:
4.本发明专利的目的在量化术者在介入手术执行中的操作行为,提供一种量化介入手术操作行为的训练系统及其方法,该系统可量化不同层次医生介入操作时器械的运动学与力学信息,以高水平专家为基准评估操作者,更好的服务于手术训练。
5.本发明的技术方案为:
6.一种量化介入手术操作行为的训练系统,包括在摄影箱内设有驱动装置、多血管模型模块、可调节光源;还包括图像采集模块、力学信息采集模块、多元信息处理模块;
7.驱动装置包括驱动器与血泵,驱动装置基于plc控制或其他控制原理完成对血泵的调控以模拟不同生理状态下的血流动力学状态;血泵用于提供血管模型内连续的流体环境;
8.多血管模型模块,包括多血管模型、储液箱,所述的血管模型、储液箱通过管路连接成环路,储液箱外设有恒温装置,储液箱内有类血溶液;多血管模型模块功能为提供用于介入手术训练的不同的个性化病灶血管模型及相关流体动力学环境;
9.管路负责连接多血管模型各分支与储液箱,管路数量可根据具体多血管模型及应用场景进行调整,不应受到本专利中实施案例限制;
10.储液箱可储存介入手术训练系统中所需的类血溶液;类血溶液,采用蒸馏水与甘油的混合溶液,以接近于真实血液的物理属性。
11.恒温模块的作用在于维持多血管模型及管路中的液体温度接近人体35℃-37℃正常体温;
12.多血管模型的作用在于提供不同介入操作的病变血管模型;
13.多血管模型基于硅胶软材料利用3d打印技术构建具有病患特异性结构的病灶血
管模型,可作为任意介入手术的目标血管,并用于介入手术操作训练使用。此外,多血管模型下可安置有曲度贴合血管模型外轮廓的支撑架以避免操作时额外的晃动。模型留有可替换接头可搭配临床介入鞘管使用。
14.可调节光源的作用在于提供介入手术训练时所需的亮度需求;
15.摄影箱内铺设有具有的反射涂层可减少血管模型的反光效应,提高成像质量。
16.图像采集模块,包括依次连接的ccd工业相机、显示器和图像采集端,用于提供双目视觉下实时的操作显示并记录器械的植入过程;
17.ccd工业相机用于实时拍摄两个角度下介入器械的位置数据;显示器可实时显示操作画面,并通过图像处理算法以模拟术中dsa影像界面,图像采集端可实时存储采集到的图像;
18.力学信息采集模块,包括近端力采集装置、远端力采集装置,端力采集装置、远端力采集装置均与数据采集端连接;力学信息采集模块用于在于采集操作者手术施加在介入器械上的力及介入器械作用在血管模型上的力;数据采集端,可同时获取近端及远端的力学信息,并实时显示在前端界面。
19.近端力采集装置包括操作端、四个三自由度传感器及中间导管调节器。三自由度传感器及操作端可获取操作者施加在器械上的推、拉及旋拧等动作。操作端上安装有可适配不同直径介入器械的中间导管调节器来适配不同尺寸的介入器械;近端力采集装置还具有操作臂部肌电信号采集装置,可获取医生操作时的肌肉与手部运动信号,同样的数据信号可实时存储于控制端计算机中。肌电信号采集装置包括信号采集电极,传输电缆以及数据采集卡,可采集操作者手术训练时的动作信号并实时存储至。
20.远端力采集装置用于获取介入过程中器械与血管模型之间的接触力,同时信号屏蔽装置可减少环境对数据采集的影响。远端力采集装置包括支撑板、六轴力传感器、信号屏蔽装置。
21.多元信息处理模块用于实时评估操作者的介入操作,与系统中多名专家的金标准操作结果进行对比,从而定性、定量的分析介入操作者的手术操作,并针对不同的操作要点给出评级意见。
22.数据多元信息处理模块的数据处理流程为通过信号采集装置获取操作人员的运动学、力学、肌肉信号等,通过多元信息处理模块进行特征提取、分类筛选、量化评估便可实时将操作评估结果反馈至操作人员以更好的提高手术操作技能。多元信息处理模块集成图像处理算法、数据分类识别以及评估算法。
23.具体的,多元信息处理模块可将操作者数据与专家组数据进行实时对照、评估,进而量化操作者的操作行为,有助于提高手术训练效果。其中,处理模块集成图像处理算法、数据分类识别以及评估算法。其中图像处理算法包括特征提取,识别以获取图像运动学信息,数据分类采用支持向量机及高斯混合模型进行数据处理,评估基于马氏距离对操作进行量化打分。
24.本发明还提供一种量化介入手术操作行为的训练方法,利用所述的一种量化介入手术操作行为的训练系统,多元信息处理模块中存储有不同介入术室的专家级别的操作数据,处理模块集成图像处理算法、数据分类识别以及评估算法;其中图像处理算法包括特征提取,识别以获取图像运动学信息,数据分类采用支持向量机及高斯混合模型进行数据处
理,评估基于马氏距离对操作进行量化打分;
25.将操作人员操作时的所涉及图像信息、运动学信息及力学信息进行分类、识别、统计;通过与系统中获取的不同专家操作的金标准数据进行对比分析,进行评估打分,从而量化操作者各操作的具体得分细节,并针对具体操作指标给出修改意见。
26.本发明专利的技术方案至少具有以下有益效果:
27.本发明提供的量化介入手术操作行为的训练系统,可以模拟介入手术操作的环境,结合机器视觉与多物理传感器量化介入手术操作的行为,通过与系统中专家组的操作数据进行对比,明确操作细节存在的不足之处,进而更好的提高手术训练效果,提高介入手术操作技能。
附图说明
28.此处所展示的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。所述附图中:
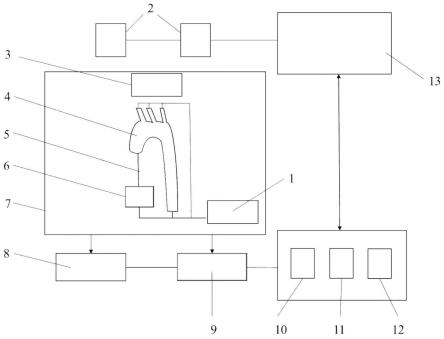
29.图1是本发明量化介入手术操作行为的训练系统的结构示意图;
30.图2是本发明近端力采集装置8结构示意图;
31.图3是本发明肌信号采集装置示意图;
32.图4是本发明远端力采集装置9结构示意图;
33.图5是本发明数据多元信息处理模块12组成及数据处理流程;
34.图中1—驱动装置;2—ccd工业相机;3—光源;4—多血管模型;5—管路;6—储液箱及恒温装置;7—摄影箱;8—近端力采集装置;9—远端力采集装置;10—数据采集端;11—图像采集端;12—多元信息处理模块;13—显示器。
具体实施方式
35.为使本发明实施例的技术方更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
36.参考图1,一种量化介入手术操作行为的训练系统,其特征在于,包括在摄影箱7内设有驱动装置1、多血管模型模块、可调节光源3;还包括图像采集模块、力学信息采集模块、多元信息处理模块12;
37.驱动装置1包括驱动器与血泵,驱动装置1基于plc控制或其他控制原理完成对血泵的调控以模拟不同生理状态下的血流动力学状态;血泵用于提供血管模型内连续的流体环境;
38.多血管模型模块,包括多血管模型4、储液箱6,所述的血管模型4、储液箱6通过管路5连接成环路,储液箱6外设有恒温装置,储液箱6内有类血溶液;多血管模型模块功能为提供用于介入手术训练的不同的个性化病灶血管模型及相关流体动力学环境;
39.管路5负责连接多血管模型4各分支与储液箱6,管路5数量可根据具体多血管模型4及应用场景进行调整,不应受到本专利中实施案例限制;
40.储液箱6可储存介入手术训练系统中所需的类血溶液;类血溶液,采用蒸馏水与甘
油的混合溶液,密度为1050kg/m3,粘度为4.1cp,以接近于真实血液的物理属性。
41.恒温模块的作用在于维持多血管模型4、管路5以及储液箱6中的液体温度接近人体35℃-37℃正常体温,安装在储液箱内以实时检测系统中类血溶液的温度;
42.多血管模型4的作用在于提供不同介入操作的病变血管模型,模型制作材料为透明硅胶或者透明橡胶;
43.多血管模型4基于硅胶软材料或透明橡胶利用3d打印技术构建具有病患特异性结构的病灶血管模型。模型重建数据来自于病患血管造影成像(computed tomography angiography,cta)或磁共振成像(magnetic resonance imaging,mri)数据,可作为任意介入手术的目标血管,并用于介入手术操作训练使用。此外,多血管模型4下可安置有曲度贴合血管模型外轮廓的支撑架以避免操作时额外的晃动。模型留有可替换接头可搭配临床介入鞘管使用。
44.可调节光源3的作用在于提供介入手术训练时所需的亮度需求;
45.可调节光源3的作用在于可根据视野需求提供不同的亮度,摄影箱7内铺设有具有的反射涂层可减少血管模型的反光效应,提高成像质量。
46.图像采集模块,包括依次连接的ccd工业相机2、显示器13和图像采集端11,用于提供双目视觉下实时的操作显示并记录器械的植入过程;
47.ccd工业相机2用于实时拍摄两个角度下介入器械的位置数据;显示器13可实时显示操作画面,并通过图像处理算法以模拟术中dsa影像界面,图像采集端11可实时存储采集到的图像;
48.力学信息采集模块用于在于采集操作者手术施加在介入器械上的力及介入器械作用在血管模型上的力;力学信息采集模块,包括近端力采集装置8、远端力采集装置9,近端力采集装置8、远端力采集装置9均与数据采集端10连接;数据采集端10,可同时获取近端及远端的力学信息,并实时显示在前端界面。
49.参考图2近端力采集装置8包括操作端801、四个三自由度传感器(802—805)及中间导管调节器806。三自由度传感器及操作端可获取操作者施加在器械上的推、拉及旋拧等动作。操作端801上安装有可适配不同直径介入器械的中间导管调节器806来适配不同尺寸的介入器械;近端力采集装置8还具有操作臂部肌电信号采集装置,可获取医生操作时的肌肉与手部运动信号,同样的数据信号可实时存储于控制端计算机中。
50.参考图3肌电信号采集装置包括信号采集电极811,传输电缆812以及数据采集卡810,可采集操作者手术训练时的动作信号并实时存储至。
51.参考图4,远端力采集装置9包括支撑板901、六轴力传感器902、信号屏蔽装置903。远端力采集装置9用于获取介入过程中器械与血管模型之间的接触力,同时信号屏蔽装置可减少环境对数据采集的影响。
52.参考图5,多元信息处理模块12用于实时评估操作者的介入操作,与系统中多名专家的金标准操作结果进行对比,从而定性、定量的分析介入操作者的手术操作,并针对不同的操作要点给出评级意见。
53.数据多元信息处理模块12的数据处理流程为通过信号采集装置获取操作人员的运动学、力学、肌肉信号等,通过多元信息处理模块12进行特征提取、分类筛选、量化评估便可实时将操作评估结果反馈至操作人员以更好的提高手术操作技能。多元信息处理模块12
集成图像处理算法、数据分类识别以及评估算法。
54.训练方法为,多元信息处理模块12中存储有不同术室的专家级别的操作数据,如主动脉介入、冠脉介入、颅内介入等,但不局限于以上手术。处理模块集成图像处理算法、数据分类识别以及评估算法。其中图像处理算法包括特征提取,识别以获取图像运动学信息,数据分类采用支持向量机及高斯混合模型进行数据处理,评估基于马氏距离对操作进行量化打分,支持向量机与高斯混合模型可对不同物理量进行特征分类;马氏距离的特点在于可以忽略数据的量纲而进行分析。可将操作人员操作时的所涉及图像信息、运动学信息及力学信息进行分类、识别、统计。通过与系统中获取的不同专家的操作金标准数据进行对比分析,进行评估打分,从而量化操作者各操作的具体得分细节,并针对具体操作指标给出修改意见,有助于操作者了解自身操作的不足之处,进而更好的提高介入操作手术技能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1