一种基于惯性传感器的新型单摆实验系统的制作方法
1.本发明涉及单摆技术领域,尤其涉及一种基于惯性传感器的新型单摆实验系统。
背景技术:
2.单摆实验是一个十分重要的物理实验,其主要通过在小角度下使用简单简谐运动的原理从而计算重力加速度。传统的单摆实验通过秒表计时来获得周期,其精度较低;现有的方案有激光遮挡测量周期、光电门法测量周期这种方法无法直观的体现出摆整个变化的过程,同样也有利用电磁感原理获得周期,其装置复杂,易受到干扰,实验条件苛刻,这些方法对实验教学都存在着局限性,故本发明设计了一种基于惯性传感器的新型单摆实验系统,解决了装置复杂,易受到干扰,单摆实验无法直观的观察其变化过程的问题。
技术实现要素:
3.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
4.鉴于上述现有存在的问题,提出了本发明。
5.因此,本发明解决的技术问题是:装置复杂,易受到干扰,单摆实验无法直观的观察其变化过程的问题。
6.为解决上述技术问题,本发明提供如下技术方案:完成装置的安装,并打开位于终端设备上的上位机软件,将摆球拉至一定角度,使得摆球做来回运动,并利用微处理器采集并处理惯性传感器数据;
7.将所述惯性传感器数据上传至上位机实时显示,并计算单步周期和平均周期;
8.改变摆球质量进行不同质量下的实验测试,并通过测量轻质细线的长度l和摆球半径r和配重组件外壳的厚度r得到摆的长度和周期。
9.作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:所述装置的安装包括,
10.支持杆设置于底座顶部,底座和支持杆构成支撑组件,用于吊起摆球,利用轻质细线将摆球悬挂于底座上方;
11.所述摆球内部容纳有小型锂电池盒和数据采集处理模块盒,所述小型锂电池盒用于固定锂电池,所述数据采集处理模块盒用于固定处理器模块,且所述数据采集处理模块盒采用分层叠加的方式。
12.作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:所述微处理器对惯性传感器数据的采集并处理包括,
13.微处理器cpu通过i2c读取惯性传感器的双轴加速度数据解算出的欧拉角,并通过卡尔曼算法将陀螺仪的积分角进行融合解算出角度。
14.作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:
所述卡尔曼算法的计算包括,
[0015][0016]
其中,表示k时刻的先验值,表示上一时刻的估计值,fk表示状态转换系数矩阵,bk表示控制模型系数矩阵,uk表示控制量;
[0017]
所述状态转换系数矩阵fk的计算包括,
[0018][0019]
其中,δt表示采样时间;
[0020]
控制模型系数矩阵bk的计算包括,
[0021][0022]
作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:当uk=θk时,k时刻的先验值的计算包括,
[0023][0024]
其中,θ表示滤波器输出的角度,表示上一时刻角速度的先验值。
[0025]
作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:基于状态转换系数矩阵fk和系统噪声误差矩阵q,获取当前时刻先验误差协方差矩阵p
k|k-1
,
[0026][0027]
其中,表示状态转换系数矩阵fk的转置矩阵,p
k-1|k-1
表示上一时刻的估计的误差协方差矩阵;
[0028]
基于当前时刻先验误差协方差矩阵p
k|k-1
、测量系数矩阵hk和测量噪声r,计算当前时刻的卡尔曼增益矩阵kk,
[0029][0030]
其中,表示测量系数矩阵hk的转置矩阵。
[0031]
作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:还包括,
[0032][0033]
其中,表示当前时刻的估计状态,zk表示测量值;
[0034]
p
k|k
=(i-k
khk
)p
k|k-1
[0035]
其中,p
k|k
表示当前时刻误差协方差矩阵,i表示单位矩阵。
[0036]
作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:所述欧拉角θ的计算包括,
[0037][0038]
其中,ay表示y轴的加速度,az表示z轴的加速度,a
x
表示x轴的加速度。
[0039]
作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:所述摆的长度的计算包括,
[0040]
l=l+r+r
[0041]
其中,l表示摆的长度,l表示轻质细线,r表示摆球的半径,r表示配种组件外壳的厚度。
[0042]
作为本发明所述的基于惯性传感器的新型单摆实验系统的一种优选方案,其中:所述摆的周期t的计算包括,
[0043][0044]
其中,g表示重力加速度,θ表示滤波器输出的角度。
[0045]
本发明的有益效果:
[0046]
①
将惯性传感器同微处理器放入小球,形成高度集成,解决实验装置的复杂性;
[0047]
②
通过微处理器将惯性传感器数据处理成实时的角度,并通过wifi将角度实时上传至终端,解决了单摆实验无法直观的观察其变化过程的问题;
[0048]
③
通过上传的数据,实时计算单步周期和平均周期,且周期也可通过波形获得,精度高,解决了单摆实验只能计算单步周期或平均周期的困扰,精度较低的问题;
[0049]
④
提出了一种圆包式配重,可实现配重的均匀分布,重心偏移较小,解决了传统配重要重新计算摆长,配重不均的问题;
[0050]
本发明采用惯性传感器的原理和flutter设计的单摆实验系统,实现了单摆过程的角度实时可视化,因此其周期精度更高,并且其设计架构简单、成本低廉、抗干扰能力强等优点,此外设计了圆包式外壳配重,解决了因配重带来的摆长误差,使得计算的重力加速度结果更加精确。
附图说明
[0051]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
[0052]
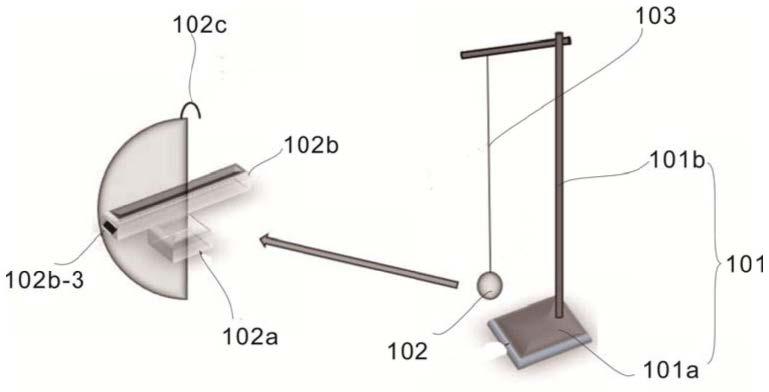
图1为本发明一个实施例提供的一种基于惯性传感器的新型单摆实验系统的单摆实验系统装置图;
[0053]
图2为本发明一个实施例提供的一种基于惯性传感器的新型单摆实验系统的mcu最小系统和惯性传感器集成模块示意图;
[0054]
图3为本发明一个实施例提供的一种基于惯性传感器的新型单摆实验系统的配重组件结构示意图;
[0055]
图4为本发明一个实施例提供的一种基于惯性传感器的新型单摆实验系统的处理
的数据通过wifi上传至上位机实时显示的示意图;
[0056]
图5为本发明一个实施例提供的一种基于惯性传感器的新型单摆实验系统的上位机演示图。
具体实施方式
[0057]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明,显然所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明的保护的范围。
[0058]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
[0059]
其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
[0060]
本发明结合示意图进行详细描述,在详述本发明实施例时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本发明保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
[0061]
同时在本发明的描述中,需要说明的是,术语中的“上、下、内和外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一、第二或第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0062]
本发明中除非另有明确的规定和限定,术语“安装、相连、连接”应做广义理解,例如:可以是固定连接、可拆卸连接或一体式连接;同样可以是机械连接、电连接或直接连接,也可以通过中间媒介间接相连,也可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0063]
实施例1
[0064]
参照图1~4,为本发明的一个实施例,提供了一种基于惯性传感器的新型单摆实验系统,包括:
[0065]
s1:完成装置的安装,并打开位于终端设备上的上位机软件,将摆球拉至一定角度,使得摆球做来回运动,并利用微处理器采集并处理惯性传感器数据.需要说明的是:
[0066]
装置的安装包括,
[0067]
如图1所示支持杆101b设置于底座101a顶部,底座101a和支持杆101b构成支撑组件101,用于吊起摆球102,利用轻质细线103将摆球悬挂于底座上方;
[0068]
优选的,轻质细线的选用,可大大降低单摆102的系统误差;
[0069]
摆球102内部容纳有小型锂电池盒102a和数据采集处理模块盒102b,小型锂电池盒102a用于固定锂电池,数据采集处理模块盒102b用于固定处理器模块,且数据采集处理模块盒采用分层叠加的方式。
[0070]
进一步的,数据采集处理模块盒采用分层叠加的方式可减小摆球的半径,其中102b-1为mcu最小系统,102b-2为惯性传感器集成模块,102b-3和102b-4是给充电口micro usb的开口,内部采用环氧树脂填充。
[0071]
图3所示为配重组件104,配重组件104为半球壳,其中104a为挂钩开口,便于将配重组件104合上,两个配重组件104通过卡口将摆球102包裹在其中,且配重组件104的半径要大于摆球102的半径,同时,配重组件104的壳厚度可根据重量来增加或减少。
[0072]
s2:将所述惯性传感器数据上传至上位机实时显示,并计算单步周期和平均周期。需要说明的是:
[0073]
微处理器将没10ms采集一次惯性传感器数据,同时将处理的数据通过wifi上传至上位机实时显示,如图4所示。
[0074]
s3:改变摆球质量进行不同质量下的实验测试,并通过测量轻质细线的长度l和摆球半径r和配重组件外壳的厚度r得到摆的长度和周期。需要说明的是:
[0075]
微处理器对惯性传感器数据的采集并处理包括,
[0076]
微处理器cpu通过i2c读取惯性传感器的双轴加速度数据解算出的欧拉角,并通过卡尔曼算法将陀螺仪的积分角进行融合解算出角度。
[0077]
卡尔曼算法的计算包括,
[0078][0079]
其中,表示k时刻的先验值,表示上一时刻的估计值,fk表示状态转换系数矩阵,bk表示控制模型系数矩阵,uk表示控制量;
[0080]
状态转换系数矩阵fk的计算包括,
[0081][0082]
其中,δt表示采样时间;
[0083]
控制模型系数矩阵bk的计算包括,
[0084][0085]
当uk=θk时,k时刻的先验值的计算包括,
[0086][0087]
其中,θ表示滤波器输出的角度,表示上一时刻角速度的先验值。
[0088]
基于状态转换系数矩阵fk和系统噪声误差矩阵q,获取当前时刻先验误差协方差矩阵p
k|k-1
,
[0089][0090]
其中,表示状态转换系数矩阵fk的转置矩阵,p
k-1|k-1
表示上一时刻的估计的误差协方差矩阵,此处
[0091]
基于当前时刻先验误差协方差矩阵p
k|k-1
、测量系数矩阵hk和测量噪声r,计算当前时刻的卡尔曼增益矩阵kk,
[0092][0093]
其中,表示测量系数矩阵hk的转置矩阵,这里hk=(1 0),r=0.03。
[0094]
还包括,
[0095][0096]
其中,表示当前时刻的估计状态,zk表示测量值;
[0097]
p
k|k
=(i-k
khk
)p
k|k-1
[0098]
其中,p
k|k
表示当前时刻误差协方差矩阵,i表示单位矩阵。
[0099]
欧拉角θ的计算包括,
[0100][0101]
其中,ay表示y轴的加速度,az表示z轴的加速度,a
x
表示x轴的加速度。
[0102]
摆的长度的计算包括,
[0103]
l=l+r+r
[0104]
其中,l表示摆的长度,l表示轻质细线,r表示摆球的半径,r表示配种组件外壳的厚度。
[0105]
摆的周期t的计算包括,
[0106][0107]
其中,g表示重力加速度,θ表示滤波器输出的角度。
[0108]
①
将惯性传感器同微处理器放入小球,形成高度集成,解决实验装置的复杂性;
[0109]
②
通过微处理器将惯性传感器数据处理成实时的角度,并通过wifi将角度实时上传至终端,解决了单摆实验无法直观的观察其变化过程的问题;
[0110]
③
通过上传的数据,实时计算单步周期和平均周期,且周期也可通过波形获得,精度高,解决了单摆实验只能计算单步周期或平均周期的困扰,精度较低的问题;
[0111]
④
提出了一种圆包式配重,可实现配重的均匀分布,重心偏移较小,解决了传统配重要重新计算摆长,配重不均的问题;
[0112]
本发明采用惯性传感器的原理和flutter设计的单摆实验系统,实现了单摆过程的角度实时可视化,因此其周期精度更高,并且其设计架构简单、成本低廉、抗干扰能力强等优点,此外设计了圆包式外壳配重,解决了因配重带来的摆长误差,使得计算的重力加速度结果更加精确。
[0113]
实施例2
[0114]
参照图5为本发明的第二个实施例,该实施例不同于第一个实施例的是,提供了一种基于惯性传感器的新型单摆实验系统的验证测试,为对本方法中采用的技术效果加以验证说明,以科学论证的手段对比试验结果,以验证本方法所具有的真实效果。
[0115]
如图5所示为上位机的原型界面,采用flutter跨端开发,可同时在安卓、windows和网页端显示,解决了不同环境下的要求,应用更加便捷。其界面分为角度波形图显示界面和计算的平均周期波形显示界面,通过角度的变化波形,我们可以读出摆的单个周期,并可以读出摆在动能为0时的每个是个的角度为多少,通过摆的公式可以更精确的计算重力加速度。
[0116]
如图5所示,为上位机的演示图,图中为单摆角度变化的那个曲线(演示曲线和坐标非真实实验),表示单摆运动过程中相对x轴(可根据实际固定一个轴)角度变化的过程,该角度等于摆线与重力方向夹角,从图中可以看出,波形的波峰和波谷为一个单摆周期,或者,坐标轴y为角度,左标轴x为时间。
[0117]
曲线二为平均周期曲线,计算为第一个平均周期为第一次波峰与波谷的周期,第二次平均周期为,第一次波峰与波谷的时间与第二次波峰与波谷的时间的平均值,第三次就是前面三次波峰与波谷的时间的平均值,以此类推。
[0118]
从平均周期图可以读出周期和单摆的次数,这样,我们可以输入摆长,周期(选取x次的平均周期),从波形图中可以选取波峰与波谷之间的中间值(x次的平均值);点击计算便可得到重力加速度的值。如图第一个重力加速度用的传统公式计算的,第二个用的本发明中提及的公式计算的。如图,左上的为windows端界面,左下为web界面,右边为安卓界面,界面内容一致。
[0119]
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1