一种工程机械远程非视距驾驶舱的制作方法
1.本发明涉及工程机械车辆的遥控操作技术领域,具体涉及一种工程机械远程非视距驾驶舱。
背景技术:
2.当前,应用于大工业场景的工程机械车,车辆种类繁多,企业存在招工难,面临急迫的生产压力的大环境下,传统在现场驾驶工程机械车辆的方式越来越不受欢迎,而随着人工智能的兴起,工程机械车辆的现场作业无人化运营需求迫在眉睫。
3.中国专利文件公开了一种工程机械远程控制系统,其包括vr模拟还原系统以及适于安装于工程机械处的车载端监控系统,车载端监控系统包括第一通信装置和数据采集处理装置,第一通信装置与数据采集处理装置连接,数据采集处理装置还适于与工程机械的主控制器连接,vr模拟还原系统包括第二通信装置、操控平台和vr设备,操控平台和vr设备分别与第二通信装置连接,模拟操控平台包括模拟驾驶舱,所述模拟驾驶舱适于在所述控制指令下与所述工程机械的驾驶室同步运行,该专利虽然提出了通过操控平台和vr设备,实现工程机械与传统工业场景同步运作的技术方案,但是其没有给出具体模拟驾驶舱的结构,且当前也并没有一种具体的能够有效模拟驾驶操作的驾驶舱以供使用,因此一种在保证远程非视距操控的基础上,能够有效模拟驾驶操作的驾驶舱亟待发明。
技术实现要素:
4.本发明的目的是提供一种工程机械远程非视距驾驶舱,以解决现有技术中存在的上述技术问题;本发明提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果;详见下文阐述。
5.为实现上述目的,本发明提供了以下技术方案:
6.本发明提供的一种工程机械远程非视距驾驶舱,包括支撑装置、人机交互显示装置、工程座椅装置、模拟驾驶装置和控制装置,所述支撑装置包括底座和立柱,其中:所述人机交互显示装置设置在所述立柱上;所述工程座椅装置设置在所述底座上且与所述立柱相对设置;所述模拟驾驶装置设置在所述工程座椅装置、所述底座和所述立柱上;所述控制装置设置在所述底座上且位于所述工程座椅装置的下方,所述人机交互显示装置和所述模拟驾驶装置均与所述控制装置电连接。
7.优选地,所述人机交互显示装置包括工装视角显示屏、主视角显示屏和人机交互触控屏;所述工装视角显示屏、所述主视角显示屏和所述人机交互触控屏从上至下依次设置在所述立柱上。
8.优选地,所述立柱包括下柱体和设置在下柱体上侧的上柱体,其中:所述上柱体向靠近所述工程座椅装置的方向倾斜设置;所述工装视角显示屏设置在所述上柱体上,所述主视角显示屏和所述人机交互触控屏设置在所述下柱体上;所述下柱体上设置有置物平台。
9.优选地,所述工程座椅装置包括可调节坐垫、可调节靠背、可调节扶手和可调节头枕,其中:所述可调节靠背设置在所述可调节坐垫的后侧;所述可调节扶手的数量设置为两个,两个所述可调节扶手相对设置在所述可调节坐垫的左侧和右侧;所述可调节头枕设置在所述可调节靠背的顶侧。
10.优选地,所述模拟驾驶装置包括第一手柄控制装置和第二手柄控制装置,其中:所述第一手柄控制装置包括第一控制盒,所述第一控制盒上设置有点火开关、第一十字轴手柄和急停开关;所述第二手柄控制装置包括第二控制盒,所述第二控制盒上设置有驻车开关、第二十字轴手柄、前照灯开关、后照灯开关和左右转向灯开关。
11.优选地,所述模拟驾驶装置包括模拟方向盘和车规踏板,其中:所述模拟方向盘设置在所述立柱上;所述车规踏板设置在所述底座上;所述底座上位于所述车规踏板的一侧设置有歇脚板。
12.优选地,所述控制装置包括控制机柜,其中:所述控制机柜设置在所述底座上,且位于所述工程座椅装置的下方。
13.优选地,所述控制机柜内设置有信息采集装置、工业计算机、工业交换机、环感控制器、图传设备、保险盒、电源适配器和滤波保险端子台。
14.优选地,所述控制装置包括散热装置,所述散热装置包括散热控制器和散热风扇,其中:所述散热控制器设置在所述控制机柜内;所述控制机柜的侧壁上设置有散热窗,所述散热风扇设置在所述控制机柜的内壁上且对应所述散热窗的位置。
15.优选地,所述控制机柜上设置有通讯接口;所述通讯接口设置为rs232接口、rs485接口、can接口、rj45网口以及io接口中的一个或一个以上组合。
16.本发明提供的一种工程机械远程非视距驾驶舱至少具有以下有益效果:
17.所述工程机械远程非视距驾驶舱包括支撑装置、人机交互显示装置、工程座椅装置、模拟驾驶装置和控制装置,支撑装置包括底座和立柱,人机交互显示装置、工程座椅装置、模拟驾驶装置和控制装置均设置在所述支撑装置上,支撑装置能够牢固支撑人机交互显示装置、工程座椅装置和模拟驾驶装置,为工程机械远程非视距驾驶的模拟提供前提。
18.所述人机交互显示装置和所述模拟驾驶装置均与所述控制装置电连接,在远程驾驶的过程中,人机交互显示装置一方面能够有效显示实际工程机械的现场作业场景,另一方面具备人机交互功能,所述模拟驾驶装置和所述工程座椅装置相互配合能够有效模拟现场驾驶操作,其通过控制装置实现与现场远程机械的通讯,从而实现远程遥控。
19.本发明通过支撑装置能够牢固支撑人机交互显示装置、工程座椅装置、模拟驾驶装置和控制装置,通过人机交互显示装置一方面能够实时展现工程机械的现场作业场景,另一方面具备人机交互功能,通过工程座椅装置、模拟驾驶装置和控制装置相互配合,在能够实现远程遥控操作的基础上,有效模拟现场驾驶操作,效果显著。
20.本发明可针对多车联控,为一种可兼容多车型、跨机型接入的遥控驾驶舱。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以
根据这些附图获得其他的附图。
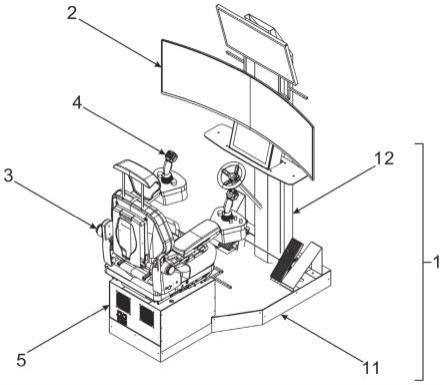
22.图1是本发明的结构示意图;
23.图2是本发明支撑装置、人机交互显示装置、模拟驾驶装置和控制装置的结构示意图;
24.图3是本发明工程座椅装置的结构示意图;
25.图4是本发明工程座椅装置另一视角的结构示意图;
26.图5是本发明a部放大图;
27.图6是本发明控制装置结构示意图;
28.图7是本发明控制机柜侧板处于分解状态的控制装置俯视示意图;
29.图8是本发明控制机柜示意图;
30.图9是本发明显示流程图;
31.图10是本发明模拟驾驶示意图。
32.附图标记
33.1、支撑装置;11、底座;121、下柱体;122、上柱体;12、立柱;13、置物平台;2、人机交互显示装置;21、工装视角显示屏;22、主视角显示屏;23、人机交互触控屏;3、工程座椅装置;31、可调节坐垫;311、坐垫本体;312、坐垫距离调节机构;32、可调节靠背;321、靠背角度调节机构;33、可调节扶手;331、扶手本体;332、可调节支撑臂;3321、第一连接臂;3322、第二连接臂;3323、第三连接臂;34、可调节头枕;341、头枕高度调节机构;4、模拟驾驶装置;41、第一控制盒;42、第二控制盒;43、模拟方向盘;44、制动踏板;45、油门踏板;46、歇脚板;5、控制装置;501、控制机柜;5011、散热窗;502、信息采集装置;503、工业计算机;504、工业交换机;505、环感控制器;506、图传设备;507、保险盒;508、电源适配器;509、滤波保险端子台;510、散热控制器;511、散热风扇;512、通讯接口。
具体实施方式
34.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
35.实施例1:
36.本发明提供了一种工程机械远程非视距驾驶舱,如图1所示,所述工程机械远视非视距驾驶舱包括支撑装置1、人机交互显示装置2、工程座椅装置3、模拟驾驶装置4和控制装置5。
37.人机交互显示装置2、工程座椅装置3、模拟驾驶装置4和控制装置5均设置在支撑装置1上,人机交互显示装置2和模拟驾驶装置4均与控制装置5电连接。
38.遥控驾驶时,人机交互显示装置2显示工程机械的现场作业场景,驾驶员坐在工程座椅装置3上,通过操作模拟驾驶装置4实现对工程机械的远程遥控。
39.在上述过程中,人机交互显示装置2还具备人机交互功能,人机交互显示装置2、工程座椅装置3、模拟驾驶装置4和控制装置5相互配合,在保证能够实现远程遥控的基础上,有效模拟驾驶操作,提高驾驶效果。
40.如图1和图2所示,支撑装置1包括底座11和立柱12。
41.底座11包括钢构底架和设置在所述钢构底架上的支撑平面,所述支撑平面包括2mm厚的钢板及起到防滑作用的花纹钢板,立柱12包括立式钢架和设置在立式钢架上的包覆件,包覆件采用1mm厚的镀锌板。
42.底座11上设置有座椅支撑结构,所述座椅支撑结构采用45号方钢制成,工程座椅装置3设置在所述座椅支撑结构上且与立柱12相对设置,人机交互显示装置2设置在立柱12上,如此设置,使驾驶员坐至工程座椅装置3上时,能面朝人机交互显示装置2,保证视角效果。
43.模拟驾驶装置4设置在工程座椅装置3、底座11和立柱12上,驾驶员坐至工程座椅装置3上,能够轻松操控模拟驾驶装置4。
44.控制装置5设置在所述座椅支撑结构上,且位于工程座椅装置3的下方,结构牢固、紧凑,一方面能够充分降低驾驶舱的延展大小,另一方面能够有效提高控制装置5其控制机柜501的防护等级。
45.实施例2:
46.实施例2建立在实施例1的基础上:
47.如图2和图9所示,人机交互显示装置2包括工装视角显示屏21、主视角显示屏22和人机交互触控屏23,工装视角显示屏21采用24寸平面高刷屏,主视角显示屏22采用49寸高刷曲面屏,人机交互触控屏23采用11寸工业触摸屏。
48.工装视角显示屏21、主视角显示屏22和人机交互触控屏23从上至下依次设置在立柱12上。
49.工装视角显示屏21用于显示转斗等工装的画面及工作状态提示信息,主视角显示屏22用于非视距远程遥控驾驶视角画面及姿态信息的显示,人机交互触控屏23用于人机交互功能的实现。
50.作为可选地实施方式,如图2所示,立柱12包括下柱体121和设置在下柱体121上侧的上柱体122。
51.下柱体121直立设置,上柱体122向靠近工程座椅装置3的方向倾斜设置,上柱体122上设置有显示屏斜角支撑钢架,下柱体121上设置有显示屏结构件以及触控屏斜角支撑钢架,工装视角显示屏21设置在所述显示屏斜角支撑钢架上,主视角显示屏22和人机交互触控屏23分别设置在所述显示屏结构件和所述触控屏斜角支撑钢架上,如此,主视角显示屏22和人机交互触控屏23与驾驶员面部相对应,工装视角显示屏21向下倾斜设置,具有更好的视角。
52.下柱体121上设置有置物平台13,置物平台13设置为采用亚克力材料制作的置物平板,用于物品的放置。
53.作为可选地实施方式,工程座椅装置3包括可调节坐垫31、可调节靠背32、可调节扶手33和可调节头枕34。
54.可调节靠背32设置在可调节坐垫31的后侧,可调节扶手33的数量设置为两个,两个可调节扶手33相对设置在可调节坐垫31的左侧和右侧,可调节头枕34设置在可调节靠背32的顶侧。
55.如图3-图5所示,可调节坐垫31包括坐垫本体311和设置在坐垫本体311底侧的坐
垫距离调节机构312,其用于可调节坐垫31前后距离位置的调节。
56.可调节靠背32能相对于可调节坐垫31转动,可调节坐垫31的一侧位于可调节靠背32和可调节坐垫31相连的位置设置有靠背角度调节机构321,其用于可调节靠背32相对于可调节坐垫31倾斜角度的调节。
57.可调节扶手33包括扶手本体331和设置在扶手本体331下方的可调节支撑臂332,可调节支撑臂332包括依次可转动相连的第一连接臂3321、第二连接臂3322和第三连接臂3323,第一连接臂3321沿竖直方向可转动设置有移动座,扶手本体331的下方设置有导向槽,所述移动座可移动设置在所述导向槽内,扶手本体331上设置有用于锁定所述移动座与所述导向槽相对位置的锁止结构,第三连接臂3323的一端与第二连接臂3322可转动连接,坐垫本体311的侧方沿竖直方向设置有导槽,第三连接臂3323的另一端沿竖直方向可转动设置有滑动座,所述滑动座滑动设置在所述导槽内,第三连接臂3323通过所述滑动座能相对于可调节坐垫31沿竖直方向转动以及沿竖直方向上下移动,第三连接臂3323对应所述滑动座的设置有锁紧结构,用于锁紧第三连接臂3323的相对位置。
58.可调节头枕34设置有头枕高度调节机构341,其用于可调节头枕相对于可调节靠背32上下高度的调节。
59.图3-图5为手动调节的工程座椅装置3。
60.可选地,工程座椅装置3还可采用电动工程座椅。
61.工程座椅装置3可设置为工程机械专用座椅,其功能与上述相同,其形状与相对应的工程机械相适配,包括挖掘机、铲土运输机、工业车辆、非公路矿用自卸车、压路机、农机等类型。
62.作为可选地实施方式,如图3和图10所示,模拟驾驶装置4包括第一手柄控制装置和第二手柄控制装置。
63.所述第一手柄控制装置包括第一控制盒41,第一控制盒41上设置有点火开关、第一十字轴手柄和急停开关。
64.所述点火开关采用三挡旋钮开关,所述第一十字轴手柄采用双轴霍尔传感器,所述急停开关采用按压式的急拍带灯开关。
65.所述第二手柄控制装置包括第二控制盒42,第二控制盒42上设置有驻车开关、第二十字轴手柄、前照灯开关、后照灯开关和左右转向灯开关。
66.所述驻车开关采用自锁带灯开关,所述第二十字轴手柄采用双轴霍尔传感器,所述前照灯开关和所述后照灯开关均采用2挡钮子开关,所述左右转向灯开关采用3档钮子开关。
67.所述第一手柄控制装置和所述第二手柄控制装置相互配合,用于工程装备的模拟操控。
68.作为可选地实施方式,如图3和图10所示,模拟驾驶装置4包括模拟方向盘43和车规踏板。
69.模拟方向盘43设置在下柱体121上,模拟方向盘43主要是由真皮方向盘和磁感应角度霍尔传感器构成,所述磁感应角度霍尔传感器为单圈360
°
绝对值定位传感器。
70.所述车规踏板设置在底座11上。
71.可选地,所述车规踏板设置为单向踏板。
72.另一可选地,所述车规踏板设置为双向踏板,其根据功能包括制动踏板44和油门踏板45,制动踏板44和油门踏板45分别设置在立柱12的两侧。
73.底座11上位于所述车规踏板的一侧设置有歇脚板46,歇脚板46采用c字型折弯板,用于驾驶员日常踩踏。
74.作为可选地实施方式,如图6-图8所示,控制装置5包括控制机柜501,控制机柜501设置在底座11上,且位于工程座椅装置3的下方。
75.控制机柜501内设置有信息采集装置502、工业计算机503、工业交换机504、环感控制器505、图传设备506、保险盒507、电源适配器508和滤波保险端子台509。
76.信息采集装置502采用工业级stm32f103系列芯片设计。
77.工业计算机503由高性能cpu及gpu运算其构成,优选地,其硬件配置为core
tm i7-9700te/ddr4 16g/ssd 128g/gtx1660s,其主要是用于gui(图形用户界面)程序的显示、人机交互及低延时视频解码操作。
78.工业交换机504为工业级以太网交换机,采用5路百兆poe设计。
79.环感控制器505由边缘ai计算平台nvidia jeston系列(tx2、xavier nx、orin)产品构成,主要用于回显点云信息并实时建模。
80.图传设备506由arm+fpga处理器模组构成,所述arm+fpga处理器模组是基于xilinx新一代arm+fpga处理器xczu5ev设计,所述arm+fpga处理器模组主要用于视频拉流操作。
81.保险盒507为dc24v(直流电电压24v)一进6出带保险分线器,用于实现dc24v分线功能。
82.电源适配器508采用500w开关电源。
83.滤波保险端子台509为二进八出分线器,用于实现ac220v(交流电电压220v)分线功能。
84.作为可选地实施方式,如图6-图8所示,控制装置5包括散热装置,所述散热装置包括散热控制器510和散热风扇511,散热控制器510与散热风扇511电连接,散热风扇511采用超静音散热风扇。
85.散热控制器510设置在控制机柜501内,控制机柜501的侧壁上设置有散热窗5011,散热风扇511设置在控制机柜501的内壁上且对应散热窗5011的位置。
86.控制机柜501的侧壁上设置有多个散热窗5011,每个散热窗5011的位置均设置有散热风扇511,散热风扇511用于控制机柜501内部各电气装置的散热。
87.作为可选地实施方式,控制机柜501上设置有通讯接口512,用于信号传输。
88.通讯接口512设置为rs232接口、rs485接口、can接口、rj45网口以及io接口中的一个或一个以上组合。
89.作为可选地实施方式,支撑装置1设置有走线管槽,用于各电气装置其线束的走线和保护。
90.本发明所述工程机械远程非视距驾驶舱适用于当前大工业场景工程机械车辆的多车型、跨机型接入,能够有效模拟其驾驶操作及远程非视距控制,实现现场作业的无人化运营。
91.在本技术的描述中,需要理解的是,术语“上”、“下”、“内”、“外”、“顶”、“底”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
92.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”、“若干”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
93.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
94.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1