一种基于榫卯技术的机械原理机器人底盘教具的制作方法
1.本实用新型涉及教具技术领域,具体涉及一种基于榫卯技术的机械原理机器人底盘教具。
背景技术:
2.目前机器人底盘设计是机器人整体设计中最不可或缺的一环,其主要是通过底部不同的运动原理与地面产生相对运动,利用底部表面运动产生动力使机器人运动。常规的机器人底盘教具或玩具有着模块化,使用简单,稳定性强等优点,但其存在着使用成本高、价格昂贵、对于机械原理理解模糊、结构组成不清晰、装配困难等问题,使得学生在学习中难以将机械原理所学与机器人底盘设计融会贯通,形成完整的思路,现有机械原理机器人设计缺乏对学生动手能力及创新能力的引导。
3.简言之,现有的机器人底盘教具或玩具相关技术中尚存在学习、成本、设计、装配、动手能力及创新能力的引导方面的缺陷亟待解决。
技术实现要素:
4.本实用新型的目的是提供一种基于榫卯技术的机械原理机器人底盘教具,用以解决现有技术中存在的至少一个上述问题。
5.为了实现上述目的,本实用新型采用以下技术方案:
6.一种基于榫卯技术的机械原理机器人底盘教具,包括底盘主体模块,所述底盘主体模块的两侧分别设有侧桥模块,所述侧桥模块的前后端分别设有轮轴模块,所述侧桥模块与底盘主体模块之间榫卯连接有悬挂模块;所述底盘主体模块包括两个水平设置的主体板,两个主体板的两侧均分别设有延伸部,所述延伸部上设有四个卯齿,位于上方的主体板上的卯齿为上卯齿,位于下方的主体板上的卯齿为下卯齿;所述侧桥模块包括两个相对设置的侧桥板,所述侧桥板上分别设有四个卯舌,位于侧桥板上方的卯舌为上卯舌,位于侧桥板下方的卯舌为下卯舌,所述上卯舌与对应的上卯齿榫卯连接,所述下卯舌与对应的下卯齿榫卯连接。
7.本技术方案,通过用木质的榫卯结构去构建机器人模型,能够更好的帮助学生去了解机器人的机械结构与榫卯结构的技术;整个机器人主体完全采用榫卯结构设计,通过此种榫卯结构的拼装,榫卯设计也加强了孩子的动手能力以及动脑能力,通过将榫卯设计融入到机器人设计中,也能够提升学生的思维创新。此外,采用左右对称的榫卯结构设计,安装简单,更容易激发学生的兴趣。本技术方案,通过将机器人整体可动组件的模块化设计,使得机器人底盘的设计原理更加简单易行,通过简化设计激发学生对于机器人设计的兴趣,更利于学生加深对于底盘结构设计思路、设计原理的理解,可以满足机器人底盘设计教学在各个不同领域的应用。
8.进一步的,为了提升侧桥模块结构的稳定性,所述侧桥板上分别设有两个卯齿,靠近前方的卯齿为前卯齿,靠近后方的卯齿为后卯齿,所述悬挂模块包括前后相对设置的前e
型架和后e型架,所述前e型架的中部杆同时与两个前卯齿榫卯连接,所述后e型架的中部杆同时与两个后卯齿榫卯连接,所述前e型架和后e型架均包括上杆和下杆,所述上杆紧压在位于上方的延伸部上,所述下杆紧压在位于下方的延伸部上,所述前e型架和后e型架榫卯连接有侧板。前e型架和后e型架分别从侧桥板上的前后两个位置实现对两个侧桥板的限位,同时在垂直方向上,上杆、中部杆和下杆的配合使用,实现了将两个主体板与侧桥板的稳固连接。
9.进一步的,为了更好的提升前e型架和后e型架之间的结构稳定性,所述侧板上设有两个侧板卯齿,所述前e型架和后e型架的外侧分别设有外侧卯舌,所述外侧卯舌分别与对应的侧板卯齿榫卯连接。
10.进一步的,为了提升侧桥板的结构设计样式,同时简化组装难度,所述侧桥模块包括中间侧桥板和对称设置在中间侧桥板前后端的两个连接侧桥板,所述中间侧桥板包括第一安装位和第二安装位,所述连接侧桥板包括第三安装位、第四安装位和第五安装位,所述第三安装位、第四安装位和第五安装位之间的连线呈三角形,所述第一安装位与第三安装位之间通过连接臂榫卯连接,所述第二安装位与第四安装位之间榫卯连接,所述第五安装位与轮轴模块榫卯连接。前后对称的两个连接侧桥板的设计,在保证了侧桥模块结构样式的同时,由于两个连接侧桥板与中间侧桥板之间的组装结构设计均一样,因此会简化组装的难度。
11.进一步的,为了提升连接臂安装的可靠性,所述连接臂的两端分别通过十字台阶轴与第一安装位、第三安装位榫卯连接。
12.具体的,十字台阶轴包括两个榫卯连接的u型轴,两个u型轴对接形成十字台阶轴;所述连接臂包括四个连接板,四个连接板的两端并排间隔榫卯连接在十字台阶轴上。两个连接板位于两个中间侧桥板之间,另两个连接板位于两个连接侧桥板的外侧。
13.进一步的,为了提升连接侧桥板与中间侧桥板连接的可靠性,所述第二安装位通过十字台阶轴与第四安装位之间榫卯连接,具体的,十字台阶轴包括两个榫卯连接的u型轴,两个u型轴对接形成十字台阶轴;为了实现对轮子的安装,所述轮轴模块包括动力转轴和轮子,所述第五安装位处通过动力转轴与轮子榫卯连接。
14.进一步的,所述轮子与动力转轴之间通过燕尾轴榫卯连接。所述动力转轴包括具有两个u形开口的第一台阶轴、第一台阶轴的第一u形开口处榫卯连接有第二台阶轴,第一台阶轴的第二u形开口处榫卯连接有燕尾轴,燕尾轴与第一台阶轴形成的十字形细颈部榫卯连接有转轴,轮子套设在转轴上,转轴由两个转轴板并排设置构成。安装时,先将两个转轴板套设在第一台阶轴的第二u形开口的外侧,后将燕尾轴对接到第二u形开口内,燕尾轴的燕尾端实现对转轴的限位,第二u形开口与燕尾轴之间具有相互啮合卡紧的卡齿。
15.进一步的,为了提供模型教具的云台操作模型功能,所述底盘主体模块上设有云台模块,所述云台模块包括云台转轴和设置在云台转轴上的云台主体,所述云台转轴包括连接榫卯,两个主体板上竖向相对设置有安装孔,位于上方的主体板为上主体板,位于下方的主体板为下主体板,所述连接榫卯包括竖向贯穿于安装孔的竖向榫卯,竖向榫卯有三个,所述竖向榫卯从下至上依次榫卯连接有第一扣紧榫卯、第二扣紧榫卯和第三扣紧榫卯,所述第一扣紧榫卯位于下主体板的下方,所述第二扣紧榫卯位于两个主体板之间,所述第三扣紧榫卯位于上主体板的上方。
16.安装时,先将三个竖向榫卯放置到下主体板的安装孔内,之后安装第一扣紧榫卯和第二扣紧榫卯,再将上主体板的安装孔套设在三个竖向榫卯上,之后再安装第三扣紧榫卯。
17.进一步的,为了提供炮管模型功能,所述云台主体包括云台支架、左侧端板和右侧端板,所述云台支架前后对称设置有两个且云台支架下端分别榫卯连接在第三扣紧榫卯上,两个云台支架均包括左侧臂和右侧臂,所述左侧端板榫卯连接在两个左侧臂之间,所述左侧端板的上下端和左侧臂同时榫卯连接有两根左侧连接杆,所述右侧端板榫卯连接在两个右侧臂之间,所述右侧端板的上下端和右侧臂同时榫卯连接有两根右侧连接杆;所述左侧端板和右侧端板之间转动连接有炮管转轴,也就是,左侧端板和右侧端板上设有圆形孔,炮管转轴分别穿过两个圆形孔,所述炮管转轴上榫卯连接有炮管组件,炮管转轴上榫卯连接有限位板,限位板实现对炮管转轴的轴向转动的限位。
18.安装时,先将两个云台支架安装在第三扣紧榫卯上,之后再在左侧端板和右侧端板之间安装炮管转轴和炮管组件。
19.进一步的,为了提供炮管组件的模型功能,所述炮管组件包括多个形状臂和锁紧结构,多个形状臂沿着炮管转轴的长度方向并排榫卯连接在炮管转轴上,所述锁紧结构榫卯连接在多个形状臂上。
20.在安装炮管转轴的过程中,一次并排安装多个形状臂,之后再通过锁紧结构的安装实现对多个形状臂的锁紧安装。
21.具体的,多个形状臂包括位于中间的中间形状臂和位于外侧的外侧形状臂,中间形状臂通过中间压件榫卯实现与中间形状臂的榫卯连接,外侧形状臂通过外侧压件榫卯实现与外侧形状臂的榫卯连接,也即是,通过中间压件榫卯和外侧压紧榫卯同时实现对多个形状臂的整体稳固安装。
22.需要说明的是,炮管转轴也为十字台阶轴,十字台架轴包括两个榫卯连接的u型轴,两个u型轴对接形成十字台阶轴。
23.本实用新型的有益效果为:本技术方案,通过用木质的榫卯结构去构建机器人模型,能够更好的帮助学生去了解机器人的机械结构与榫卯结构的技术;整个机器人主体完全采用榫卯结构设计,榫卯设计也加强了孩子的动手能力以及动脑能力,通过将榫卯设计融入到机器人设计中,也能够提升学生的思维创新。此外,采用左右对称的榫卯结构设计,安装简单,更容易激发学生的兴趣。本技术方案,通过将机器人整体可动组件的模块化设计,使得机器人底盘的设计原理更加简单易行,通过简化设计激发学生对于机器人设计的兴趣,更利于学生加深对于底盘结构设计思路、设计原理的理解,可以满足机器人底盘设计教学在各个不同领域的应用。
附图说明
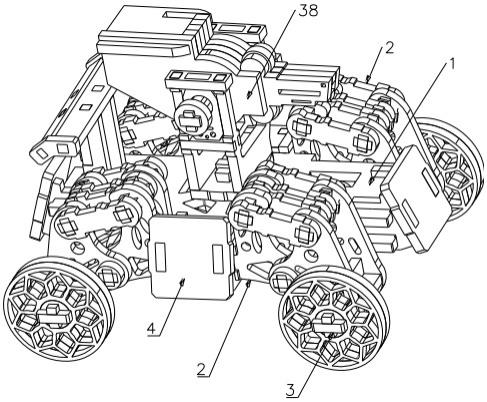
24.图1为本实用新型的立体结构示意图;
25.图2为本实用新型的侧视结构示意图;
26.图3为本实用新型中底盘主体模块的结构示意图;
27.图4为本实用新型中侧桥模块部分组件的结构示意图;
28.图5为本实用新型中侧桥模块另一部分组件的结构示意图;
29.图6为本实用新型中侧桥模块隐藏一块中间侧桥板的结构示意图;
30.图7为本实用新型中侧桥模块隐藏一个e型架的结构示意图;
31.图8为本实用新型中侧桥模块的结构示意图;
32.图9为本实用新型中侧桥模块与底盘主体模块安装状态的结构示意图;
33.图10为本实用新型中底盘主体模块与云台模块第一视角的结构示意图;
34.图11为本实用新型中底盘主体模块与云台模块第二视角的结构示意图;
35.图12为本实用新型中云台模块第一视角的结构示意图;
36.图13为本实用新型中云台模块第二视角的结构示意图;
37.图14为本实用新型中云台模块中部分组件的结构示意图。
38.图中:底盘主体模块1;侧桥模块2;轮轴模块3;悬挂模块4;上主体板5;下主体板6;延伸部7;上卯齿8;侧桥板9;上卯舌10;下卯舌11;下卯齿12;前卯齿13;后卯齿14;前e型架15;后e型架16;中部杆17;上杆18;下杆19;侧板20;侧板卯齿21;外侧卯舌22;中间侧桥板23;连接侧桥板24;第一安装位25;第二安装位26;第三安装位27;第四安装位28;第五安装位29;连接臂30;u型轴31;轮子32;第一台阶轴33;第二台阶轴34;燕尾轴35;转轴板36;卡齿37;云台模块38;安装孔39;竖向榫卯40;第一扣紧榫卯41;第二扣紧榫卯42;第三扣紧榫卯43;云台支架44;左侧端板45;右侧端板46;左侧连接杆49;右侧连接杆50;炮管转轴51;炮管组件52;限位板53;中间形状臂54;外侧形状臂55;中间压件榫卯56;外侧压件榫卯57。
具体实施方式
39.实施例一:
40.如图1-图14所示,本实施例提供一种基于榫卯技术的机械原理机器人底盘教具,包括底盘主体模块1,底盘主体模块1的两侧分别设有侧桥模块2,侧桥模块2的前后端分别设有轮轴模块3,侧桥模块2与底盘主体模块1之间榫卯连接有悬挂模块4;底盘主体模块1包括两个水平设置的主体板,两个主体板的两侧均分别设有延伸部7,延伸部7上设有四个卯齿,位于上方的主体板上的卯齿为上卯齿8,位于下方的主体板上的卯齿为下卯齿12;侧桥模块2包括两个相对设置的侧桥板9,侧桥板9上分别设有四个卯舌,位于侧桥板9上方的卯舌为上卯舌10,位于侧桥板9下方的卯舌为下卯舌11,上卯舌10与对应的上卯齿8榫卯连接,下卯舌11与对应的下卯齿12榫卯连接。
41.本技术方案,通过用木质的榫卯结构去构建机器人模型,能够更好的帮助学生去了解机器人的机械结构与榫卯结构的技术;整个机器人主体完全采用榫卯结构设计,榫卯设计也加强了孩子的动手能力以及动脑能力,通过将榫卯设计融入到机器人设计中,也能够提升学生的思维创新。此外,采用左右对称的榫卯结构设计,安装简单,更容易激发学生的兴趣。本技术方案,通过将机器人整体可动组件的模块化设计,使得机器人底盘的设计原理更加简单易行,通过简化设计激发学生对于机器人设计的兴趣,更利于学生加深对于底盘结构设计思路、设计原理的理解,可以满足机器人底盘设计教学在各个不同领域的应用。
42.实施例二:
43.本实施例是在上述实施例一的基础上进行优化。
44.为了提升侧桥模块2结构的稳定性,侧桥板9上分别设有两个卯齿,靠近前方的卯齿为前卯齿13,靠近后方的卯齿为后卯齿14,悬挂模块4包括前后相对设置的前e型架15和
后e型架16,前e型架15的中部杆17同时与两个前卯齿13榫卯连接,后e型架16的中部杆17同时与两个后卯齿14榫卯连接,前e型架15和后e型架16均包括上杆18和下杆19,上杆18紧压在位于上方的延伸部7上,下杆19紧压在位于下方的延伸部7上,前e型架15和后e型架16榫卯连接有侧板20。前e型架15和后e型架16分别从侧桥板9上的前后两个位置实现对两个侧桥板9的限位,同时在垂直方向上,上杆18、中部杆17和下杆19的配合使用,实现了将两个主体板与侧桥板9的稳固连接。
45.实施例三:
46.本实施例是在上述实施例二的基础上进行优化。
47.为了更好的提升前e型架15和后e型架16之间的结构稳定性,侧板20上设有两个侧板卯齿21,前e型架15和后e型架16的外侧分别设有外侧卯舌22,外侧卯舌22分别与对应的侧板卯齿21榫卯连接。
48.实施例四:
49.本实施例是在上述实施例三的基础上进行优化。
50.为了提升侧桥板9的结构设计样式,同时简化组装难度,侧桥模块2包括中间侧桥板23和对称设置在中间侧桥板23前后端的两个连接侧桥板24,中间侧桥板23包括第一安装位25和第二安装位26,连接侧桥板24包括第三安装位27、第四安装位28和第五安装位29,第三安装位27、第四安装位28和第五安装位29之间的连线呈三角形,第一安装位25与第三安装位27之间通过连接臂30榫卯连接,第二安装位26与第四安装位28之间榫卯连接,第五安装位29与轮轴模块3榫卯连接。前后对称的两个连接侧桥板24的设计,在保证了侧桥模块2结构样式的同时,由于两个连接侧桥板24与中间侧桥板23之间的组装结构设计均一样,因此会简化组装的难度。
51.实施例五:
52.本实施例是在上述实施例四的基础上进行优化。
53.为了提升连接臂30安装的可靠性,连接臂30的两端分别通过十字台阶轴与第一安装位25、第三安装位27榫卯连接。
54.具体的,十字台阶轴包括两个榫卯连接的u型轴31,两个u型轴31对接形成十字台阶轴;连接臂30包括四个连接板,四个连接板的两端并排间隔榫卯连接在十字台阶轴上。两个连接板位于两个中间侧桥板23之间,另两个连接板位于两个连接侧桥板24的外侧。
55.实施例六:
56.本实施例是在上述实施例五的基础上进行优化。
57.为了提升连接侧桥板24与中间侧桥板23连接的可靠性,第二安装位26通过十字台阶轴与第四安装位28之间榫卯连接,具体的,十字台阶轴包括两个榫卯连接的u型轴31,两个u型轴31对接形成十字台阶轴;为了实现对轮子32的安装,轮轴模块3包括动力转轴和轮子32,第五安装位29处通过动力转轴与轮子32榫卯连接。
58.实施例七:
59.本实施例是在上述实施例六的基础上进行优化。
60.轮子32与动力转轴之间通过燕尾轴35榫卯连接。动力转轴包括具有两个u形开口的第一台阶轴33、第一台阶轴33的第一u形开口处榫卯连接有第二台阶轴34,第一台阶轴33的第二u形开口处榫卯连接有燕尾轴35,燕尾轴35与第一台阶轴33形成的十字形细颈部榫
卯连接有转轴,轮子32套设在转轴上,转轴由两个转轴板36并排设置构成。安装时,先将两个转轴板36套设在第一台阶轴33的第二u形开口的外侧,后将燕尾轴35对接到第二u形开口内,燕尾轴35的燕尾端实现对转轴的限位,第二u形开口与燕尾轴35之间具有相互啮合卡紧的卡齿37。
61.实施例八:
62.本实施例是在上述实施例七的基础上进行优化。
63.为了提供模型教具的云台操作模型功能,底盘主体模块1上设有云台模块38,云台模块38包括云台转轴和设置在云台转轴上的云台主体,云台转轴包括连接榫卯,两个主体板上竖向相对设置有安装孔39,位于上方的主体板为上主体板5,位于下方的主体板为下主体板6,连接榫卯包括竖向贯穿于安装孔39的竖向榫卯40,竖向榫卯40有三个,竖向榫卯40从下至上依次榫卯连接有第一扣紧榫卯41、第二扣紧榫卯42和第三扣紧榫卯43,第一扣紧榫卯41位于下主体板6的下方,第二扣紧榫卯42位于两个主体板之间,第三扣紧榫卯43位于上主体板5的上方。
64.安装时,先将三个竖向榫卯40放置到下主体板6的安装孔39内,之后安装第一扣紧榫卯41和第二扣紧榫卯42,再将上主体板5的安装孔39套设在三个竖向榫卯40上,之后再安装第三扣紧榫卯43。
65.实施例九:
66.本实施例是在上述实施例八的基础上进行优化。
67.为了提供炮管模型功能,云台主体包括云台支架44、左侧端板45和右侧端板46,云台支架44前后对称设置有两个且云台支架44下端分别榫卯连接在第三扣紧榫卯43上,两个云台支架44均包括左侧臂47和右侧臂48,左侧端板45榫卯连接在两个左侧臂47之间,左侧端板45的上下端和左侧臂47同时榫卯连接有两根左侧连接杆49,右侧端板46榫卯连接在两个右侧臂48之间,右侧端板46的上下端和右侧臂48同时榫卯连接有两根右侧连接杆50;左侧端板45和右侧端板46之间转动连接有炮管转轴51,也就是,左侧端板45和右侧端板46上设有圆形孔,炮管转轴51分别穿过两个圆形孔,炮管转轴51上榫卯连接有炮管组件52,炮管转轴51上榫卯连接有限位板53,限位板53实现对炮管转轴51的轴向转动的限位。
68.安装时,先将两个云台支架44安装在第三扣紧榫卯43上,之后再在左侧端板45和右侧端板46之间安装炮管转轴51和炮管组件52。
69.实施例十:
70.本实施例是在上述实施例九的基础上进行优化。
71.为了提供炮管组件52的模型功能,炮管组件52包括多个形状臂和锁紧结构,多个形状臂沿着炮管转轴51的长度方向并排榫卯连接在炮管转轴51上,锁紧结构榫卯连接在多个形状臂上。
72.在安装炮管转轴51的过程中,一次并排安装多个形状臂,之后再通过锁紧结构的安装实现对多个形状臂的锁紧安装。
73.具体的,多个形状臂包括位于中间的中间形状臂54和位于外侧的外侧形状臂55,中间形状臂54通过中间压件榫卯56实现与中间形状臂54的榫卯连接,外侧形状臂55通过外侧压件榫卯57实现与外侧形状臂55的榫卯连接,也即是,通过中间压件榫卯56和外侧压紧榫卯同时实现对多个形状臂的整体稳固安装。
74.需要说明的是,炮管转轴51也为十字台阶轴,十字台架轴包括两个榫卯连接的u型轴31,两个u型轴31对接形成十字台阶轴。
75.最后应说明的是:以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1