一种基于物体特定朝向入库的机器人实训装置的制作方法
1.本实用新型涉及机器人教学领域,尤其涉及一种基于物体特定朝向入库的机器人实训装置。
背景技术:
2.机器人作为现代工业的重要组成部分,已经逐渐走进各个领域,各个领域的工厂正在快速的向智能化方向发展;只需要向机器人输入指定的程序,机器人即可按照指定的程序进行工作,并且工作效率高;然而,当前很多学生在参加工作之后往往需要很长时间的培训才可以正式地进行工作;因此,本实用新型提出了一种基于物体特定朝向入库的机器人实训装置,在学生参加工作之前对机器人编程进行练习,使学生在参加工作之后可以更加快速的正式进行工作,减小培训时间;并且本实用新型可以自动的将练习所需要的物体码放好,不仅节约了人员的时间而且码放的更加精准、快速。
技术实现要素:
3.本实用新型所使用技术方案是:一种基于物体特定朝向入库的机器人实训装置,包括:工作平台和练习块;所述工作平台上固定安装有人机交互平台、立体仓库、机器人、操作台、视觉模组;所述立体仓库、机器人、操作台和视觉模组均与所述人机交互平台电性连接;
4.所述机器人用于在所述立体仓库和操作台之间搬运所述练习块;
5.所述视觉模组用于当练习块被放置于所述操作台上时,检测所述练习块的位置以及放置角度;
6.所述立体仓库用于将位于其内的练习块自动推送到固定的位置;
7.所述操作台用于对被放置于其上的练习块的位置以及角度进行调整;
8.所述机器人末端设有用于防止碰撞的传感器;所述传感器与所述人机交互平台电性连接。
9.进一步地,所述立体仓库包括:库架;所述库架固定安装在所述工作平台上;所述立体仓库上固定安装有若干组放置组件,每组放置组件均固定安装在所述立体仓库上;
10.所述放置组件包括:放置板;所述放置板固定安装在所述库架上;所述放置板上设有若干个用于放置所述练习块的放置槽;所述放置板上转动安装有推板;所述库架上固定安装有推动装置,且转动安装有转动杆;所述推动装置输出端伸出时,通过转动杆使得推板进行转动;每个所述推动装置均与所述人机交互平台电性连接。
11.进一步地,所述练习块共有四个侧面,每个侧面均为不同颜色。
12.进一步地,所述库架上固定安装有若干个色彩传感器;每个所述色彩传感器均与每个所述放置槽一一对应;每个所述色彩传感器均与所述人机交互平台电性连接。
13.进一步地,所述操作台包括:操作台架;所述操作台架固定安装在所述工作平台上,所述操作台架中心处转动安装有旋转盘;所述操作台架上固定安装有旋转电机,所述旋
转电机的输出轴与所述旋转盘中心处固定连接;所述旋转电机与所述人机交互平台电性连接。
14.进一步地,所述操作台架上转动安装有锥齿环;所述操作台架上固定安装有驱动电机,所述驱动电机的输出轴上固定安装有一号锥齿轮,所述一号锥齿轮与所述锥齿环相互啮合;所述操作台架上还转动安装有四个二号锥齿轮,每个所述二号锥齿轮均与所述锥齿环啮合,且相邻的两个二号锥齿轮之间的夹角为90
°
;所述操作台架上还滑动安装有四个推动架,每个所述推动架分别与对应的所述二号锥齿轮啮合连接;所述驱动电机与所述人机交互平台电性连接。
15.由于本实用新型采用了上述技术方案,本实用新型具有的有益效果如下:
16.一、本实用新型可对机器人的操控进行教学,通过操作本实用新型可使学员对机器人的操作编程更加熟练。
17.二、本实用新型通过立体仓库使得在教学前向立体仓库内放置练习块时,无需精准放置,通过放置组件即可将练习块精准的推送到固定的位置,方便快捷。
附图说明
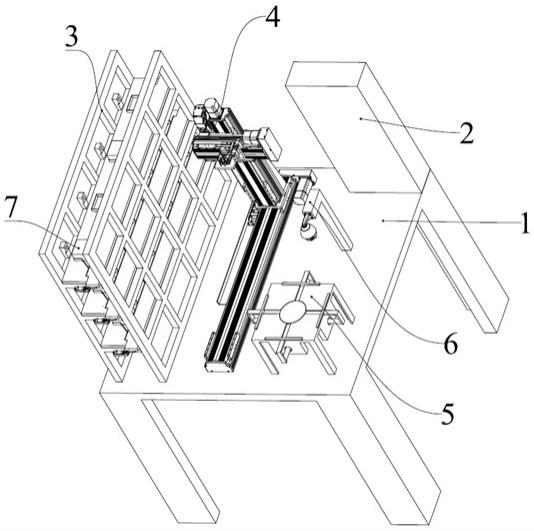
18.图1为本实用新型整体结构示意图。
19.图2为本实用新型图1中a处放大示意图。
20.图3为本实用新型立体仓库整体结构示意图。
21.图4为本实用新型立体仓库侧面截断示意图。
22.图5为本实用新型操作台整体结构示意图。
23.图6为本实用新型操作台部分结构剖面示意图。
24.图7为本实用新型操作台部分结构示意图。
25.附图标记:工作平台-1;人机交互平台-2;立体仓库-3;机器人-4;操作台-5;视觉模组-6;练习块-7;库架-31;放置板-32;推板-33;转动杆-34;推动装置-35;色彩传感器-36;传感器-41;操作台架-51;旋转电机-52;旋转盘-53;驱动电机-54;一号锥齿轮-55;锥齿环-56;二号锥齿轮-57;推动架-58。
具体实施方式
26.实施例,如图1-7所示,一种基于物体特定朝向入库的机器人实训装置,包括:工作平台1和练习块7;工作平台1上固定安装有人机交互平台2、立体仓库3、机器人4、操作台5、视觉模组6;立体仓库3、机器人4、操作台5和视觉模组6均与人机交互平台2电性连接;
27.机器人4用于在立体仓库3和操作台5之间搬运练习块7;
28.视觉模组6用于当练习块7被放置于操作台5上时,检测练习块7的位置以及放置角度;
29.立体仓库3用于将位于其内的练习块7自动推送到固定的位置;
30.操作台5用于对被放置于其上的练习块7的位置以及角度进行调整;
31.机器人4末端设有用于防止碰撞的传感器41;传感器41与人机交互平台2电性连接;传感器41为红外距离传感器;当传感器41检测到的距离小于等于5厘米,发送信号给人机交互平台2,人机交互平台2立即发出紧急停止信号,使得机器人4紧机停止,防止发生撞
机。
32.具体的,如图3-4所示,立体仓库3包括:库架31;库架31固定安装在工作平台1上;立体仓库3上固定安装有三组放置组件,每组放置组件均固定安装在立体仓库3上;
33.放置组件包括:放置板32;放置板32固定安装在库架31上;放置板32上设有四个用于放置练习块7的放置槽;放置板32上转动安装有推板33;库架31上固定安装有推动装置35,且转动安装有转动杆34;推动装置35输出端伸出时,通过转动杆34使得推板33进行转动,将放置板32上的练习块7完全推入放置板32上的放置槽内;每个推动装置35均与人机交互平台2电性连接;推动装置35设为电缸;在开始教学之前,由人员将练习块7放置到放置板3上的放置槽内,随后启动推动装置35,通过推动装置35使得转动杆34转动,转动杆34会推动推板33进行转动,从而将练习块7完全推入放置板32上的放置槽内;人员只需将练习块7放置到大概的位置即可,无需进行精准的放置,减小了人员的工作时间,并且使得练习块7的放置位置更加精准。
34.具体的,如图3所示,练习块7共有四个侧面,每个侧面均为不同颜色,库架31上固定安装有多个色彩传感器36;每个色彩传感器36均与每个放置槽一一对应;每个色彩传感器36均与人机交互平台2电性连接;色彩传感器36可检测到练习块7朝向色彩传感器36一面的颜色。
35.具体的,如图5-7所示,操作台5包括:操作台架51;操作台架51固定安装在工作平台1上,操作台架51中心处转动安装有旋转盘53;操作台架51上固定安装有旋转电机52,旋转电机52的输出轴与旋转盘53中心处固定连接;旋转电机52与人机交互平台2电性连接;当旋转电机52启动时,即可带动旋转盘53进行转动;操作台架51上转动安装有锥齿环56;操作台架51上固定安装有驱动电机54,驱动电机54的输出轴上固定安装有一号锥齿轮55,一号锥齿轮55与锥齿环56相互啮合;操作台架51上还转动安装有四个二号锥齿轮57,每个二号锥齿轮57均与锥齿环56啮合,且相邻的两个二号锥齿轮57之间的夹角为90
°
;操作台架51上还滑动安装有四个推动架58,每个推动架58分别与对应的二号锥齿轮57啮合连接;驱动电机54与人机交互平台2电性连接;当驱动电机54启动时,即可通过一号锥齿轮55带动锥齿环56进行转动,从而使得二号锥齿轮57旋转,由于每个推动架58均与对应的二号锥齿轮57啮合,且均滑动在操作台架51上,因此,当驱动电机54启动时,使得四个推动架58同时向旋转盘53中心运动。
36.工作原理:在开始教学之前,由人员将练习块7放入放置板32上的放置槽内,启动推动装置35即可将所有练习块7恰到好处的推送到放置板32上的放置槽内;教师指定其中一个放置槽所对应的色彩传感器36应当检测到何种颜色,通过学员操控机器人4将练习块7取出并再次放置到放置槽内,并使指定的色彩传感器36所检测到的颜色符合教师的指定;学员的操作步骤为:操控机器人4将练习块搬运到旋转盘53上,随后使旋转盘53旋转,使得练习块7侧面颜色的朝向改变,随后再次通过机器人4将练习块7搬运到放置板32上的放置槽内,色彩传感器36检测练习块7朝向色彩传感器36一面的颜色,根据色彩传感器36检测到颜色,判断学员的操作是否符合教师的要求;另一种教学方法为:教师将练习块7放置到操作台架51上,并指定学员将练习块7放置到放置板32上的凹槽内;学员应进行操作流程为,启动旋转电机52和驱动电机54,通过旋转盘53的转动和四个推动架58的推动之间的配合,使得练习块7被摆正且位于旋转盘53中心,视觉模组6可检测练习块是否被摆正以及是否位
于旋转盘53中心;当练习块7被摆正且位于旋转盘53中心时,操作机器人4将练习块放置到放置板32上的放置槽内。
37.以上结合附图对本实用新型的实施例进行了描述,但是本实用新型并不局限于上述的具体实施方式,本领域的技术人员在不脱离本实用新型宗旨和权利要求所护的范围情况下,还可得到很多形式,这些均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1