一种机器人关节驱动器的制作方法
本技术涉及机械部件,具体涉及一种机器人关节驱动器。
背景技术:
1、机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用。
2、因此目前越来越多的高校开展了智能机械的专业以及教学活动,目前在传统的机械臂教学中,一般采用成型的机械臂作为实践活动的基础,因此在教学活动中的教学内容限制较高,不能充分的发挥学生的自主创新能力。
技术实现思路
1、本实用新型的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理的一种机器人关节驱动器。
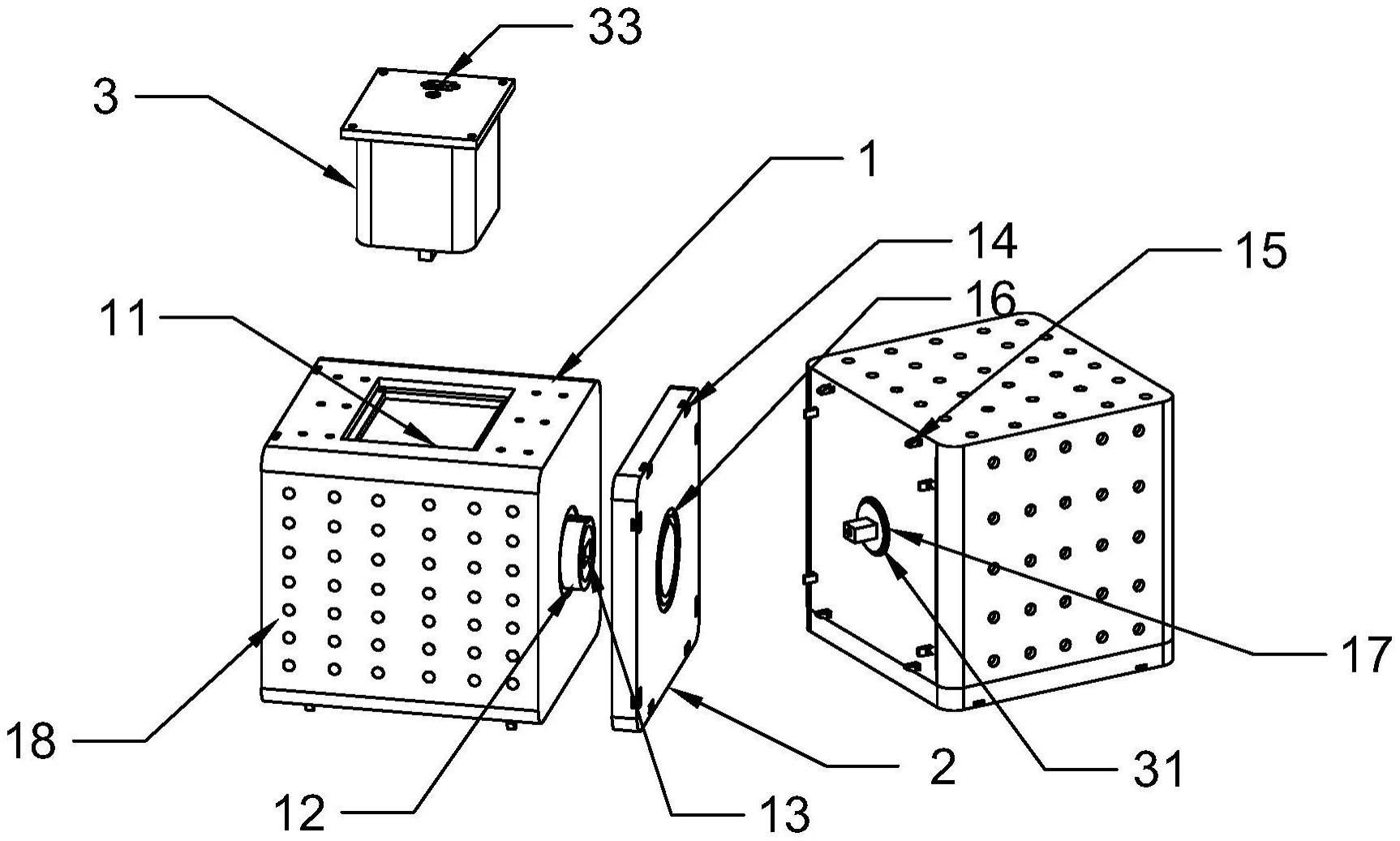
2、本实用新型解决上述问题所采用的技术方案是:一种机器人关节驱动器,包括壳体、固定盘以及舵机,所述的固定盘的转动轴与固定盘转动连接,所述的壳体设置有设置舵机的腔体,舵机的驱动轴由壳体的一端面伸出,所述的驱动轴与转动轴呈九十度设置,转动轴的一端与壳体固定,转动轴的另一端设置有与驱动轴适配插接固定的插接口,设置驱动轴的壳体端面设置有卡口,设置驱动轴的壳体端面设置有与卡口适配的弹性卡扣块,在壳体的端面均设置有若干螺纹孔。
3、进一步的:所述的设置驱动轴的壳体端面的对立端面设置有开口,舵机有开口安装进入腔体,所述的舵机设置有固定盘,固定盘通过螺栓件固定在开口边沿,舵机的通信接口设置在固定盘的外端面。
4、进一步的:设置驱动轴的端面设置有第一轴承件,所述的轴承的外圈与壳体固定,所述的驱动轴设置有截面为圆的圆柱段以及截面为矩形的柱形段,所述的第一轴承件的内圈与圆柱段插设固定,柱形段伸出第一轴承件的内圈,设置转动轴的端面设置有第二轴承件,所述的第二轴承件的外圈与固定盘固定,转轴轴与第二轴承件的内圈固定。
5、进一步的:所述的柱形段适配设置在插接口并通过螺栓件进行固定。
6、本实用新型与现有技术相比,具有以下优点和效果:本实用新型涉及的采用模块化设计,可单独进行使用,同时可根据实际的需求进行组合形成多位关节驱动,满足在教学活动中的组合,本产品各部件利用可拆卸卡扣间以及螺栓固定的方式,可重复进行拆卸组合,利于教学活动中的推广。
技术特征:
1.一种机器人关节驱动器,其特征在于:包括壳体、固定盘以及舵机,所述的固定盘的转动轴与固定盘转动连接,所述的壳体设置有设置舵机的腔体,舵机的驱动轴由壳体的一端面伸出,所述的驱动轴与转动轴呈九十度设置,转动轴的一端与壳体固定,转动轴的另一端设置有与驱动轴适配插接固定的插接口,设置驱动轴的壳体端面设置有卡口,设置驱动轴的壳体端面设置有与卡口适配的弹性卡扣块,在壳体的端面均设置有若干螺纹孔。
2.根据权利要求1所述的一种机器人关节驱动器,其特征在于:所述的设置驱动轴的壳体端面的对立端面设置有开口,舵机有开口安装进入腔体,所述的舵机设置有固定盘,固定盘通过螺栓件固定在开口边沿,舵机的通信接口设置在固定盘的外端面。
3.根据权利要求1所述的一种机器人关节驱动器,其特征在于:设置驱动轴的端面设置有第一轴承件,所述的轴承的外圈与壳体固定,所述的驱动轴设置有截面为圆的圆柱段以及截面为矩形的柱形段,所述的第一轴承件的内圈与圆柱段插设固定,柱形段伸出第一轴承件的内圈,设置转动轴的端面设置有第二轴承件,所述的第二轴承件的外圈与固定盘固定,转轴轴与第二轴承件的内圈固定。
4.根据权利要求3所述的一种机器人关节驱动器,其特征在于:所述的柱形段适配设置在插接口并通过螺栓件进行固定。
技术总结
本技术公开了一种机器人关节驱动器,包括壳体、固定盘以及舵机,所述的固定盘的转动轴与固定盘转动连接,所述的壳体设置有设置舵机的腔体,舵机的驱动轴由壳体的一端面伸出,所述的驱动轴与转动轴呈九十度设置,转动轴的一端与壳体固定,转动轴的另一端设置有与驱动轴适配插接固定的插接口,设置驱动轴的壳体端面设置有卡口,本技术涉及的采用模块化设计,可单独进行使用,同时可根据实际的需求进行组合形成多位关节驱动,满足在教学活动中的组合,本产品各部件利用可拆卸卡扣间以及螺栓固定的方式,可重复进行拆卸组合,利于教学活动中的推广。
技术研发人员:庄博雯,赵志宽,尹诚伟,马梓越,张学伟,陈嘉鑫
受保护的技术使用者:庄博雯
技术研发日:20220624
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!