一种教学型智能服务机器人的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种教学型智能服务机器人。
背景技术:
2.目前,服务型机器人大多数是2轮为主的差速形式,也有3轮和4轮全向结构形式的,但每个机器人的运动结构是固定的。而教学领域应用的服务型教学机器人也有运动结构形式单一的类似问题,每种机器人只体现出一种运动结构,在不更换机器人的情况下,不能够实现其它运动结构方式变换,这种服务型机器人给教学带来一定的局限性。学生只能学到一种运动结构的机器人,如果想学习其它运动结构的机器人学校就必须再投入资金进行购买,这样就增加了学校的资金投入。
3.因此,提供一种教学型智能服务机器人,该服务机器人能够组装变换形成2轮、3轮和4轮结构,从而丰富运动结构,扩大教学演示种类,降低成本。
技术实现要素:
4.针对上述背景技术所提出的问题,本实用新型的目的是:旨在提供一种教学型智能服务机器人。
5.为实现上述技术目的,本实用新型采用的技术方案如下:
6.一种教学型智能服务机器人,包括在上的机器人主体和在下的用于承载机器人主体的底盘,所述底盘包括下端开放的圆柱形的壳体、与壳体开放端螺栓连接的封板以及通过封板安装并向下露出封板的若干主动轮结构;
7.所述主动轮结构包括l形支架、与l形支架固定连接的驱动电机以及连接在驱动电机输出端的车轮;
8.所述封板设有环状分布的第一轮系出口、第二轮系出口、第三轮系出口、第四轮系出口和第五轮系出口,所述第一轮系出口、第二轮系出口、第三轮系出口结构形状相同且位于第四轮系出口和第五轮系出口之间的位置,所述第四轮系出口和第五轮系出口结构形状相同,所述第一轮系出口适配一个车轮,所述第四轮系出口适配三个车轮的外形总和,所述封板设有呈环状分布的预留孔。
9.进一步限定,所述主动轮结构的数量为2,两个所述主动轮结构间隔180
°
对称分布,所述主动轮结构的车轮分别由第四轮系出口和第五轮系出口向下露出封板,所述车轮分别位于第四轮系出口和第五轮系出口靠近第一轮系出口的端头,所述封板在垂直于两个主动轮结构连线的位置上,通过预留孔对称连接有支撑轮,这样的结构设计,形成两轮差速结构。
10.进一步限定,所述主动轮结构的数量为3,三个所述主动轮结构间隔120
°
分布,所述主动轮结构的车轮分别由第一轮系出口、第四轮系出口和第五轮系出口向下露出封板,其中的两个车轮位于第四轮系出口和第五轮系出口的中间位置,这样的结构设计,形成三轮全向结构。
11.进一步限定,所述主动轮结构的数量为4,四个所述主动轮结构间隔90
°
分布,四个所述主动轮结构的车轮分别由第二轮系出口、第三轮系出口、第四轮系出口和第五轮系出口向下露出封板,其中的两个车轮位于第四轮系出口和第五轮系出口远离第一轮系出口的端头,这样的结构设计,形成四轮全向结构。
12.进一步限定,所述壳体的内壁设有若干带有螺纹孔的筋条,所述封板在对应筋条的位置设有锁紧孔,所述壳体与封板之间螺栓连接,所述l形支架通过预留孔与封板螺栓连接,这样的结构设计,通过锁紧孔和筋条上的螺纹孔提供螺栓连接孔位,通过预留孔规范l形支架安装位置。
13.本实用新型的有益效果:
14.1.能够组装变换形成2轮、3轮和4轮结构,丰富运动结构,扩大教学演示种类,降低成本;
15.2.运动结构的变换较为简单,只需改变主动轮结构的安装位置即可。
附图说明
16.本实用新型可以通过附图给出的非限定性实施例进一步说明;
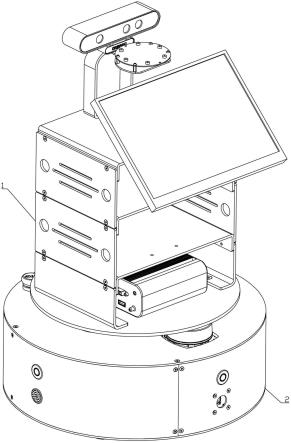
17.图1为本实用新型一种教学型智能服务机器人实施例的结构示意图;
18.图2为本实用新型一种教学型智能服务机器人实施例中底盘(三轮全向结构)的结构示意图;
19.图3为本实用新型一种教学型智能服务机器人实施例封板的结构示意图;
20.图4为本实用新型一种教学型智能服务机器人实施例构成两轮差速结构时的俯视结构示意图;
21.图5为本实用新型一种教学型智能服务机器人实施例构成三轮全向结构时的俯视结构示意图;
22.图6为本实用新型一种教学型智能服务机器人实施例构成四轮全向结构时的俯视结构示意图;
23.主要元件符号说明如下:
24.机器人主体1;
25.底盘2、壳体21、筋条211、主动轮结构22、l形支架221、车轮222、驱动电机223、封板23、第一轮系出口231、第二轮系出口232、第三轮系出口233、第四轮系出口234、第五轮系出口235、预留孔236、锁紧孔237、支撑轮24。
具体实施方式
26.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明。
27.如图1-6所示,本实用新型的一种教学型智能服务机器人,包括在上的机器人主体1和在下的用于承载机器人主体1的底盘2,底盘2包括下端开放的圆柱形的壳体21、与壳体21开放端螺栓连接的封板23以及通过封板23安装并向下露出封板23的若干主动轮结构22;
28.主动轮结构22包括l形支架221、与l形支架221固定连接的驱动电机223以及连接在驱动电机223输出端的车轮222;
29.封板23设有环状分布的第一轮系出口231、第二轮系出口232、第三轮系出口233、第四轮系出口234和第五轮系出口235,第一轮系出口231、第二轮系出口232、第三轮系出口233结构形状相同且位于第四轮系出口234和第五轮系出口235之间的位置,第四轮系出口234和第五轮系出口235结构形状相同,第一轮系出口231适配一个车轮222,第四轮系出口234适配三个车轮222的外形总和,封板23设有呈环状分布的预留孔236。
30.优选,主动轮结构22的数量为2,两个主动轮结构22间隔180
°
对称分布,主动轮结构22的车轮222分别由第四轮系出口234和第五轮系出口235向下露出封板23,车轮222分别位于第四轮系出口234和第五轮系出口235靠近第一轮系出口231的端头,封板23在垂直于两个主动轮结构22连线的位置上,通过预留孔236对称连接有支撑轮24,这样的结构设计,形成两轮差速结构。实际上,也可以根据具体情况具体考虑形成两轮差速结构其它的结构形状。
31.优选,主动轮结构22的数量为3,三个主动轮结构22间隔120
°
分布,主动轮结构22的车轮222分别由第一轮系出口231、第四轮系出口234和第五轮系出口235向下露出封板23,其中的两个车轮222位于第四轮系出口234和第五轮系出口235的中间位置,这样的结构设计,形成三轮全向结构。实际上,也可以根据具体情况具体考虑形成三轮全向结构其它的结构形状。
32.优选,主动轮结构22的数量为4,四个主动轮结构22间隔90
°
分布,四个主动轮结构22的车轮222分别由第二轮系出口232、第三轮系出口233、第四轮系出口234和第五轮系出口235向下露出封板23,其中的两个车轮222位于第四轮系出口234和第五轮系出口235远离第一轮系出口231的端头,这样的结构设计,形成四轮全向结构。实际上,也可以根据具体情况具体考虑形成四轮全向结构其它的结构形状。
33.优选,壳体21的内壁设有若干带有螺纹孔的筋条211,封板23在对应筋条211的位置设有锁紧孔237,壳体21与封板23之间螺栓连接,l形支架221通过预留孔236与封板23螺栓连接,这样的结构设计,通过锁紧孔237和筋条211上的螺纹孔提供螺栓连接孔位,通过预留孔236规范l形支架221安装位置。实际上,也可以根据具体情况具体考虑其它的连接结构。
34.实施例ⅰ——两轮差速结构
35.对称设置两个间隔180
°
的主动轮结构22,并通过两个支撑轮24做旋转支撑,教学时,主要可供学生做两轮驱动训练,如差速控制,转弯控制等。
36.实施例ⅱ——三轮全向结构
37.三个主动轮结构22间隔120
°
设置,形成稳定的三轮全向结构,供学生做三轮驱动训练,如差速控制,转弯控制等。
38.实施例ⅲ——四轮全向结构
39.四个主动轮结构22间隔90
°
设置,形成四轮全向结构,供学生做四轮驱动训练,如差速控制,转弯控制等。
40.上述实施例仅示例性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1