具有自动翻页拍照功能的机器人及其拍照方法与流程
本技术涉及人工智能,尤其涉及一种具有自动翻页拍照功能的机器人及其拍照方法。
背景技术:
1、银行的个贷部门在为客户办理完个人住房合同过程后,需要对个人住房合同进行数字化处理,以方便存档管理,因此涉及到需要对装订好的文件逐一拍照、扫描后并将影像资料上传银行后台,进行远程复核、监督。在此过程中工作人员需要手持高拍仪,通过人工翻页、拍照,过程繁琐,工作效率低且容易出错,浪费人力。
2、对于上述问题,现有其他领域中有使用到脚部动作发出指令并通过吸盘进行翻页,但仍不能脱离人工干预实现已装订合同的完全自动化处理,且用到的吸盘不易吸附纸张,即使吸附后也易在翻页过程中极易掉落,造成翻页困难。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。
2、为此,本技术的一个目的在于提出一种具有自动翻页拍照功能的机器人,可对已装订成册的银行房屋贷款部门的文件、合同书等文件进行逐页自动扫描、拍照,将合同文本进行数字化保存;
3、本技术的另一个目的在于提出一种自动翻页拍照的方法,使用了上述的机器人。
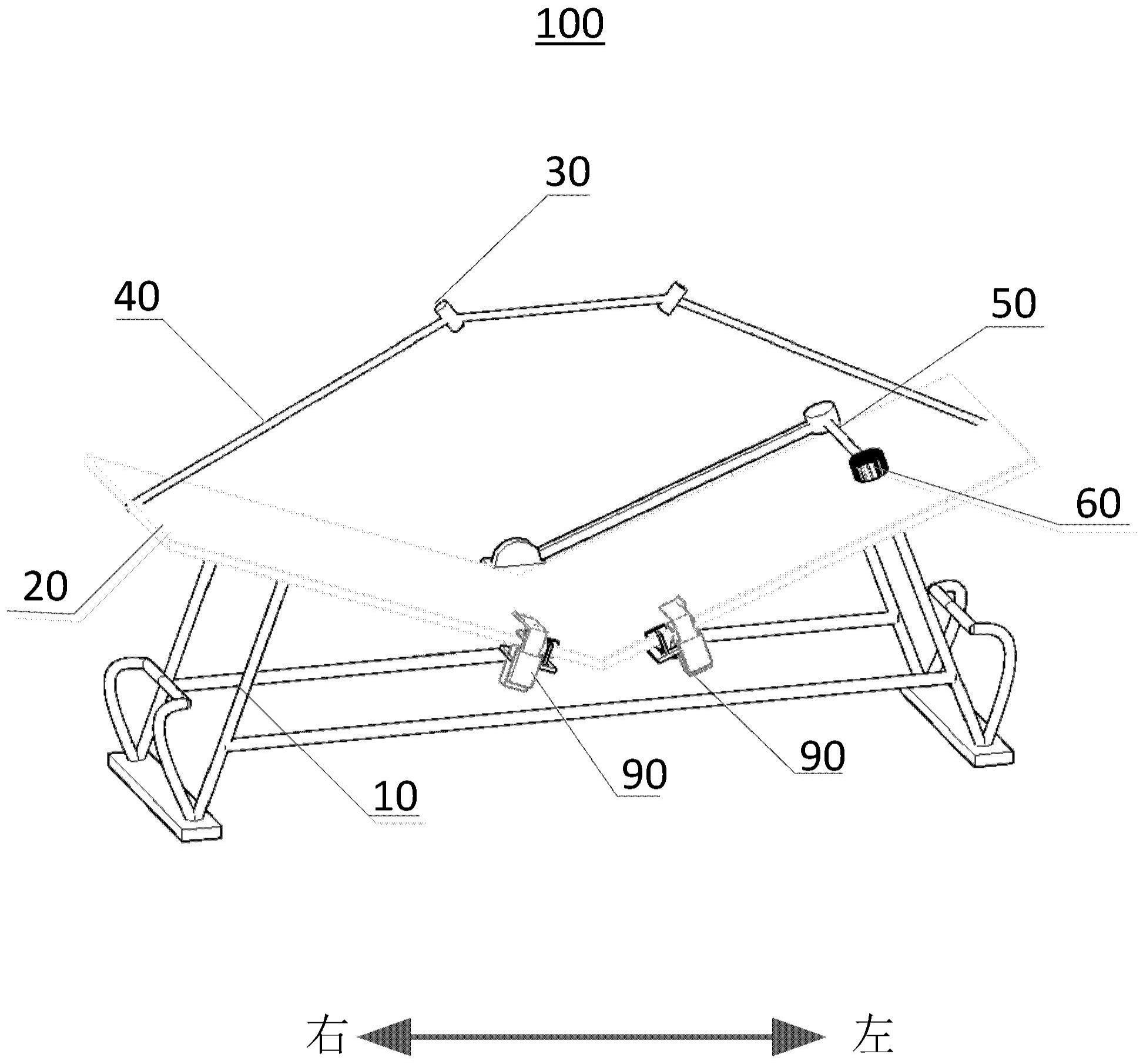
4、为了达到上述目的,本技术第一方面提供了具有自动翻页拍照功能的机器人,包括:支架;面板,所述面板固定在所述支架上,所述面板适于支撑已装订成册的文件;摄像机,所述摄像机通过支撑架固定在所述面板的上方;翻页摇臂,所述翻页摇臂的一端通过第一转轴与所述面板的一侧转动连接,所述翻页摇臂的另一端的至少部分可选择性地位于所述面板的上方,所述第一转轴的转轴与所述文件的装订线平行或重合;第一控制器,所述第一控制器与所述翻页摇臂电连接;吸纸器,所述吸纸器设置在所述翻页摇臂的另一端,所述吸纸器包括:壳体和风扇,所述壳体具有容纳腔,所述壳体的表面开设有多个进气孔,所述风扇安装在所述容纳腔内,其中,所述吸纸器具有吸纸状态和释放状态,在所述吸纸器处于吸纸状态和释放状态时,所述翻页摇臂的另一端的至少部分均位于所述面板的上方,所述风扇通过第二控制器的控制可选择性地工作,以在吸纸状态和释放状态之间进行切换。
5、根据本技术的机器人,通过翻页摇臂带动吸纸器对已装订成册的文件内纸面进行吸附,吸纸器依靠其内部的风扇作用,使其周围气流的压强减小,纸面在大气压的作用下被吸附在吸纸器壳体的表面,再依靠第一转轴带动翻页摇臂的旋转完成翻页,摄像机配合拍照实现数字化存档处理。本技术的机器人可节省人力,用机器设备代替手工劳动,且可减少出错的概率,为银行的数字化革命打好坚实基础。
6、进一步地,所述吸纸器还包括第一驱动机构,所述第一驱动机构设置在所述容纳腔内并与所述风扇通过所述第一驱动机构的驱动轴连接,所述第一驱动机构与所述第二控制器电连接。
7、进一步地,所述壳体构造为柱形,所述壳体包括:面向所述面板的吸附面和从所述吸附面的边周缘向背离所述面板延伸的环体,所述吸附面与所述环体限定出所述容纳腔,所述吸附面上开设有多个所述进气孔。
8、进一步地,所述吸附面构造为平面。
9、进一步地,所述壳体还包括与所述吸附面相对设置的背离面,所述背离面固定在所述环体上,所述吸附面、所述环体和所述背离面共同限定出所述容纳腔,所述背离面上开设有通风孔。
10、进一步地,所述吸附面、所述环体和所述背离面由金属或塑料制成。
11、进一步地,所述翻页摇臂包括第一臂和第二臂,所述第一臂的一端通过所述第一转轴与所述支架转动连接,所述第一臂的另一端与所述第二臂的一端相连且具有夹角α,所述第二臂可选择性地位于所述面板的上方,所述第二臂的另一端上固定有所述环体或所述背离面。
12、进一步地,所述第一臂的另一端与所述第二臂的一端通过第二转轴转动连接,所述第二转轴的转轴垂直于所述面板的方向,0≤α≤180°。
13、进一步地,所述面板构造为v字形且关于第一直线对称,所述第一直线与所述文件的装订线方向相同。
14、进一步地,还包括:纸张展平器,所述纸张展平器设置在所述面板的另一侧,并通过第三控制器的控制在第二直线上移动,所述第二直线与第一直线垂直,所述纸张展平器的至少部分通过第四控制器的控制压紧或远离所述板面。
15、进一步地,所述纸张展平器设置有两个,两个纸张展平器关于所述第一直线对称。
16、进一步地,所述纸张展平器包括:展平板;第二驱动机构,所述第二驱动机构与所述展平板连接;第三驱动机构,所述第三驱动机构连接在所述第二驱动机构上;滑动部,所述滑动部的一端固定在所述第二驱动机构或所述第三驱动机构上,所述滑动部的另一端可滑动地设置在所述面板的另一侧,所述第二驱动机构与所述第四控制器电连接,以使所述展平板压紧或远离所述板面,所述第三驱动机构与所述第三控制器电连接,以推动所述滑动部在第二直线上移动。
17、进一步地,所述展平板上还设置有沿第二直线方向且远离所述板面的翻边。
18、进一步地,所述第二驱动机构与所述展平板之间还设置有弹簧。
19、进一步地,所述第二驱动机构构造为液压缸或气压缸,所述液压缸的伸缩端或所述气压缸的伸缩端通过所述弹簧与所述展平板连接。
20、进一步地,所述第二驱动机构构造为电磁铁,所述展平板由金属制成,所述电磁铁的伸缩端通过所述弹簧与所述展平板连接。
21、进一步地,所述第三驱动机构包括输出轮和动力电机,所述输出轮与所述动力电机的输出端套接,所述输出轮设置在所述面板的下方且与所述面板的下表面止抵,在所述第三驱动机构的驱动下,所述输出轮在所述面板的下表面沿第二直线方向滚动。
22、进一步地,所述面板的下侧设置有与所述输出轮适配的第一轨道,所述第一轨道沿第二直线方向延伸。
23、进一步地,所述滑动部包括滑块和连接杆,所述滑块与所述连接杆相连,所述连接杆固定在所述第二驱动机构或所述第三驱动机构上,所述面板的另一侧的上表面上设置有与所述滑块适配的第二轨道,所述第二轨道与所述第一轨道平行,在所述第三驱动机构的驱动下,所述滑块在第二直线上滑动。
24、进一步地,所述面板的上表面还设置有光感传感器,适于监测所述面板上是否存在文件。
25、本技术第二方面提供了使用所述的机器人,包括以下步骤:
26、调整翻页摇臂的另一端,并使翻页摇臂的另一端的至少部分可位于面板的上方;
27、启动第一控制器并控制第一转轴向第一方向转动,所述第一方向为正常阅读时需要翻页的相反方向;
28、在吸纸器贴服于已装订成册的文件的页面上时,关闭第一控制器并启动第二控制器,第二控制器控制吸纸器吸附页面;
29、在吸纸器吸附上页面后,再次启动第一控制器并控制第一转轴第二方向转动,其中,所述第二方向与第一方向相反,为正常阅读时需要翻页的方向;
30、在翻页摇臂的另一端转动大于90°后,关闭第一控制器和第二控制器;
31、再次调整翻页摇臂的另一端,并使翻页摇臂的另一端的至少部分移出面板的上方;
32、摄像机执行拍照。
33、进一步地,所述方法还包括:
34、在吸纸器刚吸附上页面时,翻页摇臂的另一端在5°范围内轻微摆动n次,n为大于1且小于5的整数。
35、进一步地,在摄像机执行拍照之前,所述方法还包括:
36、启动第三控制器控制纸张展平器由页面边缘向装订线移动;
37、在到达装订线附近时第三控制器停止,并启动第四控制器控制纸张展平器压紧页面;
38、再次启动第三控制器控制纸张展平器由装订线向外侧移动;
39、在纸张展平器移动到页面的边缘或移出页面边缘时,停止第三控制器并使第四控制器控制纸张展平器远离页面。
40、进一步地,所述方法还包括:在光感传感器检测到无页面时,停止调整翻页摇臂的另一端。
41、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!