基于教学机器人的编程教学方法及系统与流程
本申请属于编程教学领域和互联网产业的一般数据处理,具体涉及一种基于教学机器人的编程教学方法及系统。
背景技术:
1、在当前的编程教学中,仅是将调整好的可运行编程文件发送给学生进行学习,用户学习后将该编程文件运用到教学机器人上运行就结束了。使得教学机器人与用户的交互性较弱,学生的编程学习参与度也不高。
技术实现思路
1、本申请实施例提供了一种基于教学机器人的编程教学方法及系统,以使得用户在进行编程学习的同时,可以通过用户手动操作反馈的数据来增强教学机器人拾取废弃物的成功率,同时提高用户的成就感,增强用户的学习兴趣和培养用户在对编程内容中相关参数值的写入时的准确度,综合提高用户的编程能力和动手能力。
2、第一方面,本申请实施例提供了一种基于教学机器人的编程教学方法,包括:
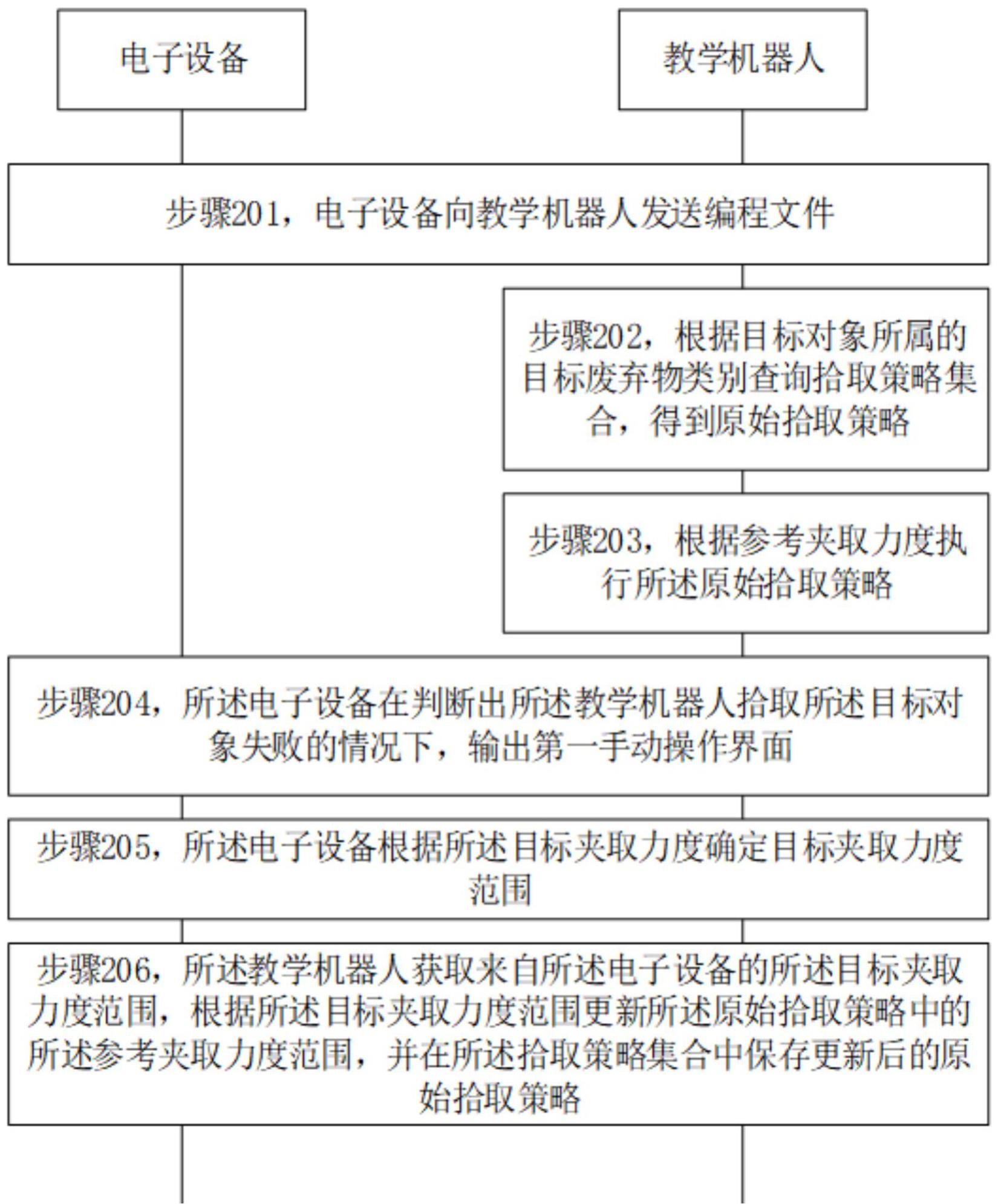
3、电子设备向教学机器人发送编程文件,所述编程文件中包括根据编程教学内容编写的用于实现废弃物巡检收集功能的控制程序;
4、所述教学机器人根据所述控制程序执行步骤a和步骤b:
5、步骤a,根据目标对象所属的目标废弃物类别查询拾取策略集合,得到原始拾取策略,所述目标对象为待拾取废弃物,所述原始拾取策略中包括多个拾取动作步骤,以及所述多个拾取动作步骤中的每个拾取动作步骤的参数信息组,所述多个拾取动作步骤中包括夹取动作步骤和抬起动作步骤,所述夹取动作步骤对应的参数信息组中包括参考夹取力度范围,所述参考夹取力度范围中包括的夹取力度是指用于触发执行所述抬起动作步骤的夹取力度,所述参考夹取力度范围为对所述目标废弃物类别中包含的物体进行分析后得到的用于学习验证的经验值区间;
6、步骤b,根据参考夹取力度执行所述原始拾取策略,所述参考夹取力度为所述参考夹取力度范围内的任意一个夹取力度;
7、所述电子设备在判断出所述教学机器人拾取所述目标对象失败的情况下,输出第一手动操作界面,所述第一手动操作界面用于指示用户通过手动操作以控制所述教学机器人拾取所述目标对象,以此获取所述教学机器人成功拾取所述目标对象时的目标夹取力度;
8、所述电子设备根据所述目标夹取力度确定目标夹取力度范围,所述目标夹取力度范围用于更新所述原始拾取策略中的参考夹取力度范围;
9、所述教学机器人获取来自所述电子设备的所述目标夹取力度范围,根据所述目标夹取力度范围更新所述原始拾取策略中的所述参考夹取力度范围,并在所述拾取策略集合中保存更新后的原始拾取策略。
10、第二方面,本申请实施例提供了一种基于教学机器人的编程教学系统,包括电子设备和教学机器人,其中,
11、所述电子设备,用于执行如上述第一方面中由所述电子设备所执行的步骤;
12、所述教学机器人,用于执行如上述第一方面中由所述教学机器人所执行的步骤。
13、第三方面,本申请实施例提供了一种计算机可读存储介质,其中,上述计算机可读存储介质存储用于电子数据交换的计算机程序,其中,上述计算机程序使得计算机执行如本申请实施例第一方面任一方法中所描述的部分或全部步骤。
14、第四方面,本申请实施例提供了一种计算机程序产品,其中,上述计算机程序产品包括存储了计算机程序的非瞬时性计算机可读存储介质,上述计算机程序可操作来使计算机执行如本申请实施例第一方面任一方法中所描述的部分或全部步骤。该计算机程序产品可以为一个软件安装包。
15、第五方面,本申请实施例提供了一种电子设备,所述电子设备用于执行如上述第一方面中由所述电子设备所执行的步骤。
16、第六方面,本申请实施例提供了一种教学机器人,所述教学机器人用于执行如上述第一方面中由所述教学机器人所执行的步骤。
17、可以看出,本申请实施例中,首先电子设备向教学机器人发送编程文件,然后教学机器人根据控制程序执行步骤a和步骤b:步骤a,根据目标对象所属的目标废弃物类别查询拾取策略集合,得到原始拾取策略;步骤b,根据参考夹取力度执行所述原始拾取策略;再然后电子设备在判断出所述教学机器人拾取所述目标对象失败的情况下,输出第一手动操作界面,所述第一手动操作界面用于指示用户通过手动操作以控制所述教学机器人拾取所述目标对象,以此获取所述教学机器人成功拾取所述目标对象时的目标夹取力度,再然后所述电子设备根据所述目标夹取力度确定目标夹取力度范围,所述目标夹取力度范围用于更新所述原始拾取策略中的参考夹取力度范围,最后所述教学机器人获取来自所述电子设备的所述目标夹取力度范围,根据所述目标夹取力度范围更新所述原始拾取策略,并在所述拾取策略集合中保存更新后的原始拾取策略。
18、这样使得用户可以根据编程教学内容学习对废弃物巡检收集功能的控制程度的编写,同时由于编程文件中的参考夹取力度范围是根据经验确定用于用户学习验证的区间值,因此用户还可以通过手动操作的方式反馈夹取力度数据,使得可以根据用户的手动操作逐渐缩小针对某个目标废弃物类别的夹取力度范围,提高教学机器人对该目标废弃物类别的物体的拾取成功率,增强用户在此过程中的成就感,以提高用户的学习兴趣和动手能力。以及可以让用户在手动控制的过程中感知到针对不同类废弃物的夹取力度的参数值的大小,使得用户在编程时写入的夹取力度相关的参数可以更准确。同时可以通过用户手动操作反馈的数据实现教学机器人对编程教学内容中未涉及的废弃物类别的物体的拾取,提高教学机器人的实用性。同时通过参考夹取力度范围内的任意一个参考夹取力度值进行目标对象拾取,还可以在保证夹取成功率的基础上,降低教学机器人在执行夹取动作步骤时的计算负担。教学机器人通过更新后的参考夹取力度范围中的夹取力度去拾取目标对象时,可以使得对目标对象进行拾取时不会力度过小,而无法成功拾取,也不会力度过大,使得教学机器人的动力消耗过大。
技术特征:
1.一种基于教学机器人的编程教学方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述输出第一手动操作界面之后,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述电子设备获取所述用户通过手动操作控制所述教学机器人拾取所述目标对象的操作过程数据,包括:
4.根据权利要求3所述的方法,其特征在于,所述夹取动作步骤对应的参数信息组中还包括参考夹取角度,所述输出第一手动操作界面之前,所述方法还包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述丢弃环境确定所述参考夹取角度是否可调整,包括:
6.根据权利要求2-5任一项所述的方法,其特征在于,所述根据目标对象所属的目标废弃物类别查询拾取策略集合,得到原始拾取策略,包括:
7.根据权利要求6所述的方法,其特征在于,目标历史拾取对象包括多个,所述根据所述至少一个目标历史拾取对象对应的拾取策略中包括的夹取力度范围确定所述参考夹取力度范围,包括:
8.根据权利要求6所述的方法,其特征在于,所述电子设备根据所述目标夹取力度确定目标夹取力度范围,包括:
9.根据权利要求8所述的方法,其特征在于,所述根据所述目标对象的目标物体状态、所述参考夹取力度范围和所述目标夹取力度确定所述目标夹取力度范围,包括:
10.一种基于教学机器人的编程教学系统,其特征在于,包括电子设备和教学机器人,其中,
技术总结
本申请提供了一种基于教学机器人的编程教学方法及系统,包括:电子设备向教学机器人发送编程文件,教学机器人根据目标对象所属的目标废弃物类别查询拾取策略集合,得到原始拾取策略,根据参考夹取力度执行原始拾取策略,电子设备在判断出教学机器人拾取目标对象失败的情况下,输出第一手动操作界面,以此获取教学机器人成功拾取目标对象时的目标夹取力度;根据目标夹取力度确定目标夹取力度范围;教学机器人获取来自电子设备的目标夹取力度范围,根据目标夹取力度范围更新原始拾取策略中的参考夹取力度范围,并在拾取策略集合中保存更新后的原始拾取策略。这样可以增强教学机器人拾取废弃物的成功率,综合提高用户的编程能力和动手能力。
技术研发人员:许政博
受保护的技术使用者:深圳市亚博智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!