一种智能制造用教学综合实训平台的制作方法
本技术涉及智能制造教学,特别涉及一种智能制造用教学综合实训平台。
背景技术:
1、智能制造是一种由智能机器和人类专家共同组成的人机一体化智能系统,它在制造过程中能进行智能活动,诸如分析、推理、判断、构思和决策等。通过人与智能机器的合作共事,去扩大、延伸和部分地取代人类专家在制造过程中的脑力劳动。它把制造自动化的概念更新,扩展到柔性化、智能化和高度集成化。
2、当前,以ai、大数据、云计算等为代表的新一代信息技术正与城市、经济、社会深度融合,在智能化背景下抢占先机、赢得未来,智能制造已成为制造业发展的必然方向。现阶段,学生仅掌握一些理论知识,缺少工业生产阶段实际技术原理的掌握,但传统网络综合实训平台往往体型较大,而可供教学学习的设备涵盖的内容较少。
3、因此,亟需一种能够模拟智能制造生产线的教学实训平台,将学生的理论教育与实操相结合,使得学生可以通过教学实训平台对智能制造生产线多模块的应用、联系进行操作实训练习。
技术实现思路
1、针对以上问题,本实用新型提供了一种智能制造用教学综合实训平台,通过对现有智能制造设备进行模拟,形成一种能为教学及实践的智能制造设备的一体化训练平台,集编程、传感器、plc于一体,将执行机构、控制系统、驱动系统、检测系统及各专业学科有机结合,从而能对整个智能制造过程进行教学,使学生对智能生产系统的正常操作过程熟练并理解,能够在课堂上了解甚至亲身实践生产线流程,达到良好的教学效果。
2、为实现上述目的,本实用新型提供如下技术方案:
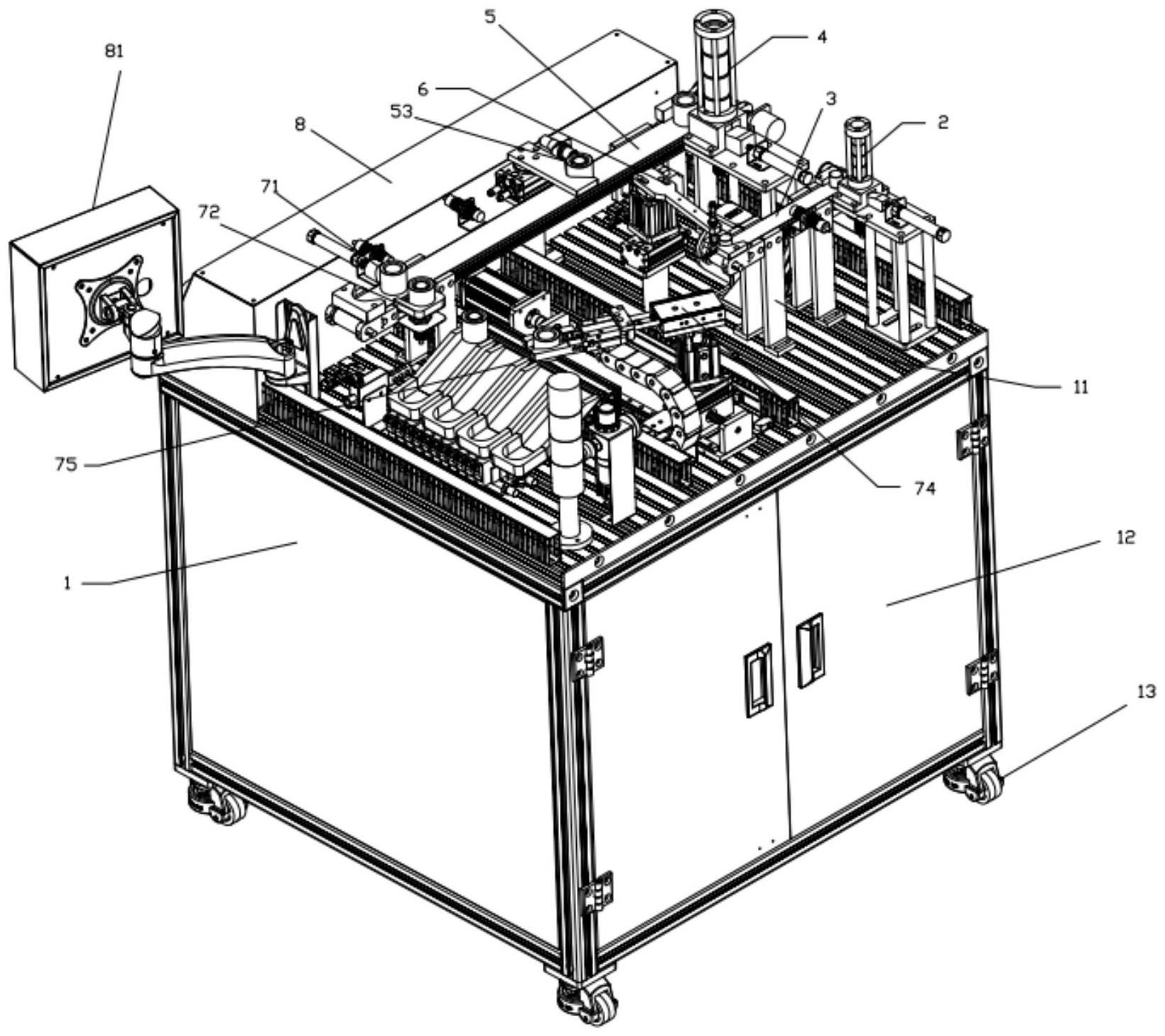
3、一种智能制造用教学综合实训平台,包括实训台,
4、所述实训台顶部的平台上分别安装有第一下料装置、第一传送带、第二下料装置、第二传送带及抓料组合装置;
5、所述第一下料装置与所述第二下料装置均设置于所述顶部的平台的一侧,所述第一下料装置逐一输出零部件a,所述第二下料装置逐一输出零部件b;
6、所述第一传送带设置于所述第一下料装置的下方,该第一传送带用于接收输送所述零部件a;
7、所述第二传送带设置于所述第二下料装置的下方,该第二传送带用于接收输送所述零部件b,所述第二传送带上沿输送方向依次设置有组合工位及输出工位;
8、所述抓料组合装置设置于所述第一传送带与所述第二传送带之间,该抓料组合装置正对所述组合工位设置,且该抓料组合装置自所述第一传送带上抓取所述零部件a转移至所述组合工位处与所述零部件b组装形成组合件c,所述组合件c从所述输出工位处输出。
9、作为改进,所述第一下料装置包括第一料仓、第一推料机构及第一定位块;
10、所述第一料仓的底部通过几字形的安装基座呈竖直架空设置,该第一料仓的顶部开设有进料口,且该第一料仓的底部开设有出料口;
11、所述第一推料机构设置于所述出料口处,该第一推料机构从所述出料口处将所述零部件a推送至所述第一传送带上;
12、所述第一定位块设置于第一传送带上,该第一定位块正对所述第一推料机构设置,且该第一定位块呈l形设置。
13、作为改进,所述第一推料机构包括第一推送器及第一推送块;
14、所述第一推送器水平设置,该第一推送器朝向第一传送带推送;
15、所述第一推送块安装于所述第一推送器的推送端上,该第一推送块通过所述第一推送器穿透所述安装基座。
16、作为改进,所述第二下料装置包括第二料仓、第二推料机构及第二定位块;
17、所述第二料仓的底部通过几字形的安装底座呈竖直架空设置,该第二料仓的顶部开设有入料口,且该第二料仓的底部开设有排料口;
18、所述第二推料机构设置于所述排料口处,该第二推料机构从所述排料口处将所述零部件b推送至所述第二传送带上;
19、所述第二定位块设置于第二传送带上,该第二定位块正对所述第二推料机构设置,且该第二定位块呈l形设置。
20、作为改进,所述第二推料机构包括第二推送器及第二推送块;
21、所述第二推送器水平设置,该第二推送器朝向第二传送带推送;
22、所述第二推送块安装于所述第二推送器的推送端上,该第二推送块通过所述第二推送器穿透所述安装底座。
23、作为改进,所述第二传送带上安装有阻挡机构,该阻挡机构位于所述组合工位处,该阻挡机构对所述第二传送带上输送的零部件b进行阻挡限位;
24、所述阻挡机构包括阻挡板及旋转器,所述阻挡板水平旋转设置,该阻挡板上开设有v形的限位槽,该限位槽对所述零部件b进行卡合限位,所述旋转器安装于所述阻挡板的下方,该旋转器带动所述阻挡板水平旋转。
25、作为改进,所述抓料组合装置包括抓料手、摆臂、抬升器及摆动驱动器;
26、所述抓料手竖直设置,该抓料手吸附抓取所述零部件a;
27、所述摆臂连接所述抓料手与所述抬升器;
28、所述抬升器驱动所述抓料手升降设置;
29、所述摆动驱动器安装在抬升器,该摆动驱动器驱动所述抓料手水平旋转摆动。
30、作为改进,所述零部件a包括零部件a及零部件b,所述零部件b包括零部件c及零部件d;
31、所述组合件c包括组合件a、组合件b、组合件c及组合件d,所述组合件a由所述零部件a与所述零部件c组合,所述组合件b由所述零部件b与所述零部件c组合,所述组合件c由所述零部件a与所述零部件d组合,所述组合件d由所述零部件b与所述零部件d组合。
32、作为改进,所述输出工位处设置有分拣存储装置,该分拣存储装置包括侧推机构、定位座、检测器、分拣机械手及存储料槽;
33、所述侧推机构安装于所述第二传送带的一侧,该侧推机构将位于所述输出工位处的所述组合件c侧推至所述定位座上;
34、所述定位座正对所述侧推机构安装于所述第二传送带的另一侧,该定位座上开设有容纳所述组合件c的定位槽;
35、所述检测器安装于所述定位座的下方,该检测器用于区分所述组合件a、组合件b、组合件c及组合件d;
36、所述分拣机械手安装于靠近所述定位座的一侧,该分拣机械手抓取所述定位槽内的组合件c转移至对应的所述存储料槽内存储;
37、所述存储料槽包括四组并排设置的存储槽,该存储槽分别用于存储所述组合件a、组合件b、组合件c及组合件d。
38、作为改进,所述侧推机构包括侧推器和侧推模块,所述侧推器水平设置,该侧推器朝向定位座推送;
39、所述侧推模块安装于所述侧推器的推送端上,该侧推模块形状贴合组合件c设置。
40、本实用新型的有益效果在于:
41、(1)本实用新型提供了一种智能制造用教学综合实训平台,通过对现有智能制造设备进行模拟,形成一种能为教学及实践的智能制造设备的一体化训练平台,集编程、传感器、plc于一体,将执行机构、控制系统、驱动系统、检测系统及各专业学科有机结合,从而能对整个智能制造过程进行教学,使学生对智能生产系统的正常操作过程熟练并理解,能够在课堂上了解甚至亲身实践生产线流程,达到良好的教学效果。
42、(2)本实用新型主要特点是占地空间小、使用安全、利于学生动手参与操作等优点。采用模块化结构设计,分别对不同的功能需要设计不同程序,在这些功能模块的相互协调下实现不同的功能,这些功能既可以单独运行,也可以与其他模块组成系统。
43、本实用新型具有真实模拟、方便操作、能熟悉各种智能制造生产系统等优点,尤其适用于智能制造实训教学技术领域。
- 还没有人留言评论。精彩留言会获得点赞!