一种教学用搬运机器人演示装置
本技术涉及教学辅助设备,特别是一种教学用搬运机器人演示装置。
背景技术:
1、在大中专院校以及职业教学等中,常常会涉及到自动搬运机器人的教学课程。为了学员更能充分理解接收自动搬运机器人的相关知识,一般教学中,都会以屏幕图解或者视频的方式讲解其工作原理及工作过程,上述教学方式由于没有实物教学,相对的学生参与度不高,不利于提高教学效果。
2、随着教学技术的发展,在教学领域当中,也出现了能完成一定设定功能的演示机器人,比如我国专利号“202021013833 .9”、专利名称“一种材料分拣演示机器人”的授权专利,其内容记载到“采用本实用新型的一种材料分拣演示机器人,待测材料依次经过霍尔传感器 以及接近传感器,自动完成分辨工作,杜绝了人工操作可能的失误,全过程自动演示金属材料和 非金属材料的分辨过程,提高教学效果”。上述可见,对比专利只能完成机器人分拣的实物教学,无法完成自主搬运货物机器人的教学演示功能,所以无法为学员直观掌握搬运机器人的工作原理起到技术支持。本申请人在国知局及专业专利检索网站输入关键字“教学用搬运机器人演示装置”、“教学搬运机器人”等进行检索,均未检索到和本申请技术方案接近的专利技术,综上所述,提供一种能进行货物搬运教学演示的机器人装置显得尤为必要。
技术实现思路
1、为了克服现有技术中,无一种专用的演示搬运机器人设备,会给相关教学工作造成一定影响,相对的不利于学员掌握相关知识点的弊端,本实用新型提供了在相关机构共同作用下,教师或学员能无线方式控制整体设备的运动方向,以及机械臂(夹具等)的工况,将一个位置的物品搬运到另一个工位,并能对单位时间内搬运的物品数量进行统计,提高了学员的参与学习的积极性,学员能更直观掌握搬运机器人设备的工作原理及工作方式知识的一种教学用搬运机器人演示装置。
2、本实用新型解决其技术问题所采用的技术方案是:
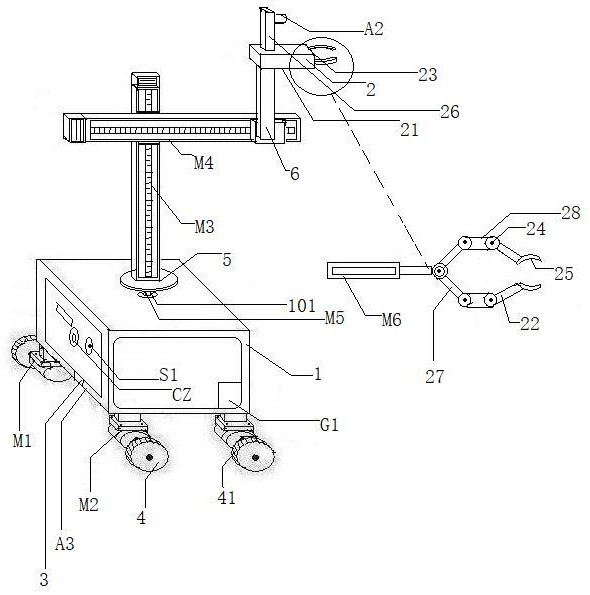
3、一种教学用搬运机器人演示装置,包括车体、电动车轮、电动直线滑台、电机减速机构、夹具、光电开关、计数器、无线遥控电路、蓄电池,其特征在于,还具有无线接收电路;所述电动车轮有多套,多套电动车轮分别安装在车体的外下端四周;所述电机减速机构安装在车体内部,电机减速机构的动力输出轴上安装有支撑板;所述电动直线滑台有至少两套,第一套电动直线滑台的下端垂直安装在支撑板的上端,第二套电动直线滑台横向安装在第一套电动直线滑台的滑动块前端,第二只电动直线滑台的滑动块前端安装有支撑架,夹具、光电开关分别安装在支撑架上;所述计数器、无线接收电路安装在车体内;所述无线接收电路的多路电源输出端和多套电动车轮、电机减速机构、两套电动直线滑台、夹具的电源输入端分别电性连接;所述光电开关的信号输出端和计数器的信号输入端电性连接。
4、进一步地,所述无线接收电路包括电性连接的两只无线接收电路模块和十只继电器,两只无线接收电路模块的正极电源输入端和十只继电器的正极控制电源输入端连接,两只无线接收电路模块的负极电源输入端和十只继电器负极电源输入端及负极控制电源输入端连接,第一只无线接收电路模块的六路电源输出端、第二只无线接收电路模块的四路电源输出端和十只继电器正极电源输入端分别连接。
5、进一步地,所述夹具包括电动推杆、支撑壳、机械手,机械手有相同的两只,支撑壳一侧端是开放式结构,电动推杆的筒体安装在支撑壳内另一侧,电动推杆的活动柱侧端铰接安装有两只连接臂,两只连接臂侧端和两只机械手的一端分别铰接安装在一起,两只机械手中部转动安装在支撑壳内,两只机械手另一端位于支撑壳一侧端外。
6、进一步地,所述两只机械手的夹口是半圆弧形,且两只机械手夹口接触后,组成的圆内径小于需要搬运的物品外径。
7、进一步地,所述支撑壳下端安装在支撑架上,支撑壳的上端安装有连接杆,光电开关的壳体安装在连接杆侧端,光电开关配套有一只安装在车体内的继电器,光电开关的电源输出端及负极电源输入端和继电器两个电源输入端分别连接。
8、本实用新型有益效果是:本实用新型主要用于教学使用,学员或者教师可方便通过无线方式控制整体设备的工作方式,进而实现物品的搬运工作演示。四套电动车轮能驱动整体设备运动在搬运区域和卸货区域之间,电机减速机构能驱动机械手接近360度(不超过360度)运动,两套电动直线滑台能驱动机械手上或下、左或右运动接近需要夹取的物品以及卸货区域,机械手能方便夹取或者卸下货物,进而将一个位置的物品搬运到另一个工位,并能通过光电开关及计数器对单位时间内搬运的物品数量进行统计。本实用新型提高了学员参与学习的积极性,学员能更直观掌握搬运机器人设备的工作原理及工作方式知识。基于上述,本实用新型具有好的应用前景。
技术特征:
1.一种教学用搬运机器人演示装置,包括车体、电动车轮、电动直线滑台、电机减速机构、夹具、光电开关、计数器、无线遥控电路、蓄电池,其特征在于,还具有无线接收电路;所述电动车轮有多套,多套电动车轮分别安装在车体的外下端四周;所述电机减速机构安装在车体内部,电机减速机构的动力输出轴上安装有支撑板;所述电动直线滑台有至少两套,第一套电动直线滑台的下端垂直安装在支撑板的上端,第二套电动直线滑台横向安装在第一套电动直线滑台的滑动块前端,第二只电动直线滑台的滑动块前端安装有支撑架,夹具、光电开关分别安装在支撑架上;所述计数器、无线接收电路安装在车体内;所述无线接收电路的多路电源输出端和多套电动车轮、电机减速机构、两套电动直线滑台、夹具的电源输入端分别电性连接;所述光电开关的信号输出端和计数器的信号输入端电性连接。
2.根据权利要求1所述的一种教学用搬运机器人演示装置,其特征在于,无线接收电路包括电性连接的两只无线接收电路模块和十只继电器,两只无线接收电路模块的正极电源输入端和十只继电器的正极控制电源输入端连接,两只无线接收电路模块的负极电源输入端和十只继电器负极电源输入端及负极控制电源输入端连接,第一只无线接收电路模块的六路电源输出端、第二只无线接收电路模块的四路电源输出端和十只继电器正极电源输入端分别连接。
3.根据权利要求1所述的一种教学用搬运机器人演示装置,其特征在于,夹具包括电动推杆、支撑壳、机械手,机械手有相同的两只,支撑壳一侧端是开放式结构,电动推杆的筒体安装在支撑壳内另一侧,电动推杆的活动柱侧端铰接安装有两只连接臂,两只连接臂侧端和两只机械手的一端分别铰接安装在一起,两只机械手中部转动安装在支撑壳内,两只机械手另一端位于支撑壳一侧端外。
4.根据权利要求1所述的一种教学用搬运机器人演示装置,其特征在于,两只机械手的夹口是半圆弧形,且两只机械手夹口接触后,组成的圆内径小于需要搬运的物品外径。
5.根据权利要求1所述的一种教学用搬运机器人演示装置,其特征在于,支撑壳下端安装在支撑架上,支撑壳的上端安装有连接杆,光电开关的壳体安装在连接杆侧端,光电开关配套有一只安装在车体内的继电器,光电开关的电源输出端及负极电源输入端和继电器两个电源输入端分别连接。
技术总结
一种教学用搬运机器人演示装置,包括车体、电动车轮、电动直线滑台、电机减速机构、夹具、光电开关、计数器、无线遥控电路、蓄电池,还具有无线接收电路;多套电动车轮分别安装在车体的外下端四周;电机减速机构安装在车体内部,电机减速机构的动力输出轴上安装有支撑板;第一套电动直线滑台的下端安装在支撑板的上端,第二套电动直线滑台安装在第一套电动直线滑台滑动块前端,第二只电动直线滑台的滑动块前端安装有支撑架,夹具、光电开关分别安装在支撑架上;计数器、无线接收电路安装在车体内并电性连接。本新型用于教学使用,使用者可方便通过无线方式控制整体设备的工作方式,进而实现物品的搬运工作演示,并能对搬运物品数量进行统计。
技术研发人员:郑丽娜,张相哲,冯俊杰,张琦琦,朱星宇
受保护的技术使用者:六盘水师范学院
技术研发日:20230628
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!