一种反刍动物仿生咀嚼装置及控制方法与流程
本发明涉及动物仿生机械,具体涉及一种反刍动物仿生咀嚼装置及控制方法。
背景技术:
1、在反刍动物的消化过程中,咀嚼过程涉及到上颌和下颌之间的复杂运动,包括旋转、平移和侧向等运动。通过咀嚼,能实现物料颗粒的细化、唾液的分泌和食物的混合,并发挥微生物在咀嚼和消化过程中的作用,帮助动物消化植物纤维等难以消化的物质。因此,在将食物咽下初步发酵前,咀嚼起着关键作用。
2、相对于体外消化技术的广泛应用和快速发展,作为消化前(预)处理的咀嚼技术停滞不前。大部分实验对饲料草料的处理,还停留在初级的剪切和粉碎阶段,并没有实现咀嚼同步湿润、揉捏、挤压等核心功能,仅满足于物料物理尺寸的缩小。申请号为201711083819.9的发明专利申请涉及一种反刍动物消化演示装置。该装置包括咀嚼单元,实现了进料和推料的演示功能,而无法有效模拟实际反刍过程中的唾液湿润、磨料、揉捏等功能性仿生特征。申请号202111389860.5的发明专利公开了一种大型牲口青饲料粉碎混合装置,采用梯度粉碎的方式,将青饲料进行一个由块到条再到碎屑的粉碎过程, 通过机械破碎的方式来实现草料物理尺寸的减小。现有技术模拟反刍动物咀嚼过程时未能全面还原实际生理功能,该问题亟待改进和优化。
3、综上所述,现有的反刍咀嚼装备存在以下技术不足:没有考虑唾液和口腔湿润环境对物料处理的影响、模拟口腔结构、牙齿形状和运动模式等方面过于简化、非伸缩运动模式。因此,设计一种口腔唾液湿润物料、模仿前臼齿和臼齿磨碎功能、滚动回弹功能参与、运动模式吻合的反刍咀嚼仿生装置,以有效地破碎和切割植物纤维,提高摄取养分的吸收效率,通过提高食物消化效率,减少动物产生的甲烷排放,进一步提升仿生咀嚼装备基础性工具技术水平,有助于推动畜牧业的环保技术发展。
技术实现思路
1、基于此,有必要针对上述问题,提供一种反刍动物仿生咀嚼装置及控制方法。本发明研究反刍动物体外咀嚼行为,能够提高反刍动物在养殖过程中对食物消化效率、增强饲料利用率,并能为研究反刍动物体外咀嚼行为,改善动物的饲养和健康状况提供研究基础。通过研究咀嚼仿生也能进一步研究反刍动物消化机理,探索对农业生产和可持续发展提供有益的解决方案。
2、反刍动物通过牙齿反复咀嚼,食物被细分成更小的颗粒,增加了食物表面积,通过将唾液与食物混合,有利于酶的作用和食物的消化。此外,反刍动物咀嚼还刺激唾液分泌,其唾液中含有大量的碳酸氢盐、磷酸氢盐等盐类,使唾液呈弱碱性。反刍动物相较于人体咀嚼更加复杂:其咀嚼时间更长,臼齿通常有较高的咀嚼面积和复杂的形状,有助于细碎食物。牙齿也会不断生长和磨损,以适应长时间的咀嚼过程。
3、本发明的核心思想是基于反刍动物咀嚼的特点,实现反刍动物咀嚼全功能的仿生效果。从进料开始,本装置能够通过混合唾液实现物料与唾液的共同咀嚼。其次,本发明的方案不仅考虑到咀嚼过程中对物料尺寸的减小,还包括挤压、磨料和揉捏等功能的实现。
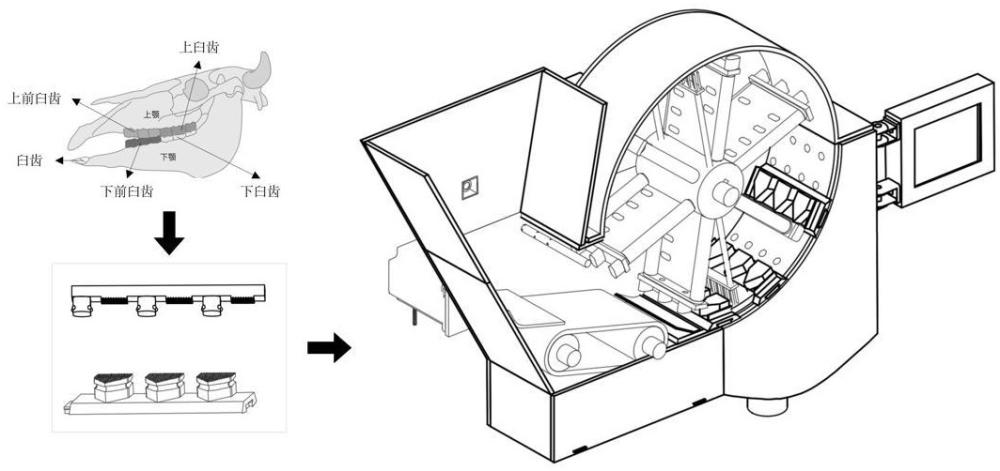
4、为了实现上述目的,本发明提供了以下技术方案:一种仿生反刍动物咀嚼系统,包括进料挡板、进料带轮(仿生舌头)、唾液仓、喷淋口(仿生唾液分泌)、感应元件、6排上牙交错牙齿(仿生上颌的上前臼齿和上臼齿)、3排下牙可左右横移压板(仿生下颌的下前臼齿和下臼齿)、压力传感器、清扫装置、筛网和可视化亚克力板。草料等进料后由光纤传感器捕捉到信号,将信号传递给上位机,上位机控制系统各部件运动。进料带轮位于进料口下方,主要用于湿润和运料操作。喷淋口位于进料带轮上方,根据装置设计大小来确定喷淋口与进料带轮之间的距离,优选地,距离设置为15cm,喷淋口用于淋湿进料物料。在落料仓侧壁安装了雾化装置,通过超声雾化功能实现转盘区域的湿润环境。该发明涉及一个由电机驱动的机械系统,其目的是通过轮子的旋转来传递运动到支撑筛板、扫料组件和上牙。装置呈圆盘状,转轴构成核心部分,用于传递动力和支撑叶片,外部由电机提供动力。具体来说,上牙装有滚珠,下牙则设有滑槽。4-8排上牙交错安装在转轴上,呈360度对称分布,模拟上颌的前臼齿和臼齿。上方牙齿可拆卸,牙齿间隙为10-20mm。
5、三排可左右横移的压板模拟下牙,被设计成模拟下颌的前臼齿和臼齿,具有左右横移的功能。通过滑槽系统的设计,实现了在咀嚼过程中的左右横向磨擦。上颌牙齿的侧面部分被设计为包含滚珠,这有助于模拟上颌牙齿在咀嚼运动中的自由滚动和适应性。
6、按照进料方向,上下牙有三组配合接触处,模拟三次咀嚼,每个咀嚼点的剪切力可设置调节分为第一咀嚼位置:对饲料进行粗加工和破碎,第二咀嚼位置:物料进一步细化,同时在第一咀嚼位置和第二咀嚼位置中间设置了揉搓板,以模拟揉搓功能。第三咀嚼位置:产生最大剪切力,在第二咀嚼位置与第三咀嚼位置中间设置了滤网,第三咀嚼位置主要用于剪切、研磨未达落料要求的物料。
7、在仿生咀嚼系统中,当牙齿在水平方向上相对滑动时,施加在食物上的力可以通过水平方向上的相对速度和摩擦力来转化为切向力。该发明中的运动转化通过摩擦力实现:(1)水平方向上的相对速度:设牙齿在水平方向上的相对滑动速度为v,这是牙齿与食物接触表面在水平方向上相对运动的速度;(2)摩擦力:施加在食物上的力主要是由于摩擦力的存在。摩擦力的大小与两个表面之间的接触力和材料之间的摩擦系数有关;(3)咀嚼剪切力的计算:切向力(ft)可以通过摩擦力的公式计算得到:ft=μ⋅n,其中,μ是摩擦系数,n是传感器检测到法向力,即牙齿对食物的垂直压力;(4)力的方向:切向力的方向与相对滑动速度方向相同,这意味着牙齿相对于食物的运动方向会施加一个切向力,对食物进行切割和破碎。
8、这样,通过控制水平方向上的相对滑动速度和调整摩擦系数,可以有效地实现牙齿在水平滑动时对食物施加的力转化为切向力,从而模拟自然咀嚼中的切割和破碎过程。
9、下牙的形状呈倒三角形状,其角度可以根据左右横移的需要进行调整。当上牙开始旋转时,前方滑槽接触到倒三角形的顶点。随着上牙的向前旋转,下方滑槽会左右横移。在下牙滑槽的一端,安装了压力传感器。当压力超过预设值时,滚动轴会回转5~15度,然后启动弹射装置使下牙滑槽返回到初始位置。清扫装置分布在6排上牙之间,主要用于防止未充分咀嚼的草料滞留在角落中。筛网用于控制落料的粗细,同时也有传感装置分析落料效果,对于落料分布进行初步判断并将落料情况反馈到上位机,调节预设参数。通过这个系统,草料能够充分咀嚼,实现真正的仿生效果且全过程数据化、可视化进行。
10、优选地,光纤传感器安装在进料口,光纤传感器接收进料信号之后,开始将电信号传递到上位机。上位机将电信号传输到其他装置,并开始预设运行参数。接收上位机发送到携带有预设运行参数及预设运行参数数值的数据采集指令。预设运行参数包括上下牙配合间隙,第一电机控制的进料转速,第二电机控制的咀嚼转速。根据所述,数据采集指令包括采集各咀嚼位置下方压力传感器的压力,以及咀嚼后草料的分布情况。
11、作为进一步的方案,进料带轮由外部嵌入的电机控制。皮带轮呈倾斜角度,并在后方设置挡料装置,防止草料滑入下方的唾液仓。唾液仓可拆卸,其中的细管连接到上方的喷淋口,并由泵提供压力。
12、优选地,上牙数量选定为6排,6排上牙所在的转轴也由第一驱动电机控制,始终朝同一方向旋转。转动过程中,任意一排牙齿的转速根据反刍动物的咀嚼周期来设置。下牙横移过程中,任意一块压板的横移距离根据反刍动物的咀嚼过程中嘴部的横向移动距离来调节。
13、优选地,所述唾液喷淋装置位于所述皮带轮上方。它与下方唾液仓通过细管连接,所述喷淋装置受到蠕动泵作用,将下方唾液送到上方。所述喷淋口均匀分布,喷淋的唾液由于重力作用呈水滴洒落在下方物料。
14、优选地,所述雾化装置位于所述落料仓侧壁。它与下方唾液仓通过细管连接,超声雾化器利用电子高频震荡,在常温下能把唾液雾化成1um到5um的微小雾粒。小雾粒不断向周围蒸发,使转盘工作区中保持类似口腔的湿度。
15、优化地,咀嚼装置中的牙齿组件包括上牙和下牙。上牙固定在转轴上,该转轴由第二驱动电机控制,而驱动电机与转轴之间通过销和槽进行固定。上牙的侧面带有一个滚珠,所述滚珠与下牙的侧面滑槽配合。下牙是呈三角形状,上牙相对于下牙平面产生向前的周向转动运动,上牙与下牙配合过程中,第一接触点落在三角形的顶点,当二者接触时,上牙对下牙施加侧向压力,使得下牙进行左右滑动的运动,从而实现左右横向磨碎的功能。此外,下牙还具有压力感应片,能够将咀嚼过程中产生的压力反馈到数据采集系统。
16、更进一步地,上牙外表面具有花纹,以增加其在转动过程中的摩擦力。而下牙的上表面轮廓呈三角形,上表面同样也带有花纹。上牙转动时,第一点与下牙三角形位置的顶点接触,上牙相对于下牙呈沿上牙轴线方向前后周向反复运动,受切向力的推动,下牙开始左右横移。此外,上牙的侧面带有一个圆珠,而下牙则具有滑槽,使配合过程更加顺畅。
17、更进一步地,反刍动物在咀嚼过程中,舌头与口腔均有倒刺,在咀嚼过程中产生揉搓效果。因此在第一咀嚼位置与第二咀嚼位置中间,设置了揉搓板,使得咀嚼过程中的揉搓功能实现更加充分。
18、更进一步地,为了防止草料卡在压板与筛网之间,牙齿之间设置了一个超出牙齿3毫米长度的扫料装置。扫料装置通过第二驱动电机旋转,来确保所有草料能重新被所述上牙所述下牙咀嚼,或是都能进入下方筛网。此外,实际的咀嚼是反复多次进行的,因此该系统还能对未达到效果的草料进行反复咀嚼.
19、更进一步地,该装置的正面外壳采用透明的亚克力板,实现了咀嚼过程的可视化。通过肉眼,操作人员可以直观地观察到咀嚼开始前和结束后草料的尺寸变化。
20、更进一步地,经充分咀嚼后的草料将进入落料阶段。落料时,通过摄像头捕捉落料的图片,结合尺寸与均匀性等参数开展细粒度图像识别,未达咀嚼效果的草料将通过分析之后反馈到上位机系统,并将其反馈保存。未达咀嚼效果的草料,系统将进行提示。
21、更进一步地,筛网可以根据实验中对不同落料效果的要求进行更换,且筛网孔径不一致,用于评估草料的咀嚼效果。
22、本方案为一种反刍动物仿生咀嚼装置及控制方法,该装置根据咀嚼过程设计,通过模拟反刍动物的咀嚼动作,将饲料进行细分和混合,未达到咀嚼效果的饲料,可通过重复仿生咀嚼对食物进行预处理。同时,相较于传统仿生咀嚼大多关注于单一咀嚼动作或者某一咀嚼肌肉群,本方案实现了咀嚼功能全方位、全流程的仿生,包含进料,唾液分泌,牙齿咀嚼,物料粗细筛分等一系列操作。在改变单一变量的情境下,都能够改变咀嚼效果,进而对研究反刍动物消化预处理的机理有意义重大。
- 还没有人留言评论。精彩留言会获得点赞!