光刻机、运动台定位测量系统及其工作方法与流程
1.本发明涉及光刻设备及系统领域,特别涉及一种光刻机、运动台定位测量系统及其工作方法。
背景技术:
2.随着集成电路朝大规模、高集成度的方向飞跃发展,光刻机的套刻精度要求也越来越高,与之相应地,获取运动台、掩模台的六自由度位置信息的精度也随之提高。
3.相比之下,光栅尺测量系统的光程可以做到很小(通常为几毫米),其光程与测量范围无关,且具有测量稳定性高、结构简单、易于小型化的特点,使其在纳米测量领域占据重要的一席之地。在新一代光刻系统中光栅尺测量系统已开始逐渐取代干涉仪,承担高精度、高稳定性、皮米精度测量任务。
4.目前,光刻机运动台上光栅尺的清洁,主要是通过安装在运动台上方的清洁装置向位于运动台上的光栅尺的表面吹洁净气体,以吹走光栅尺上的污染颗粒,减小颗粒物对光栅测量精度的影响。然而,上述方法只适用于干式且光栅平面位于运动台上的光刻机装置,但平面光栅表面静电无法消除或减小,此外,平面光栅位于运动台上方的浸没式光刻机无法采用上述方法清洁平面光栅表面静电及污染颗粒。
技术实现要素:
5.本发明的目的在于提供一种光刻机、运动台定位测量系统及其工作方法,以解决浸没式光刻机的平面光栅表面静电及污染颗粒的问题。
6.为解决上述技术问题,本发明提供一种运动台定位测量系统,所述系统包括参考框架、读头、平面光栅、运动台和吹排装置,所述读头安装在所述运动台上,所述平面光栅安装在所述参考框架上,所述吹排装置用于清洁所述平面光栅,所述吹排装置安装在所述运动台上且可跟随所述运动台移动。
7.可选的,所述系统还包括光栅安装板,所述平面光栅通过所述光栅安装板安装在所述参考框架上。
8.可选的,所述运动台上具有一读头区域,所述读头安装在所述读头区域上且所述读头可跟随所述运动台移动,所述吹排装置安装在所述读头区域上。
9.可选的,所述吹排装置包括气体离子发生单元、吹排分流块和抽排装置,所述气体离子发生单元用于电离洁净空气,所述吹排分流块利用电离后的洁净空气吹扫所述平面光栅,所述抽排装置用于抽取所述平面光栅上的污染颗粒。
10.可选的,所述气体离子发生单元包括点式电离装置和气体流道,所述点式电离装置用于将洁净空气电离成带有中和所述平面光栅表面静电的离子气流,所述气体流道用于将电离后的洁净空气输送至所述吹排分流块。
11.可选的,所述吹排分流块包括腔体、上腔盖和下腔盖,所述上腔盖和所述下腔盖闭合形成所述腔体。
12.可选的,所述下腔盖上设置有进气口和抽排回收口,所述上腔盖设置有环形吹风口。
13.可选的,所述读头位于所述环形吹风口中间,所述环形吹风口可形成包围所述读头区域的气帘,以使吹离所述平面光栅表面的污染物颗粒通过所述抽排回收口抽走。
14.可选的,所述环形吹风口的宽度大小为0.5mm-1.5mm。
15.可选的,所述环形吹风口包括多个不连续的出风单元。
16.可选的,所述抽排回收口围绕所述读头区域设置。
17.基于同一发明构思,本发明还提供一种光刻机,采用上述任一所述的运动台定位测量系统。
18.基于同一发明构思,本发明一种运动台定位测量系统的工作方法,包括:
19.步骤一,运动台定位测量系统的光源发射出光;
20.步骤二,吹排装置向平面光栅吹出电离后的洁净空气;
21.步骤三,所述平面光栅测量误差是否满足误差阈值要求;当测量误差满足误差阈值要求,执行步骤四;当光栅测量误差不满足误差阈值要求,所述吹排装置抽取污染颗粒,再继续执行步骤二;
22.步骤四,运动台定位测量系统继续工作。
23.与现有技术相比,本发明的有益效果如下:
24.本发明提供的光刻机、运动台定位测量系统及其工作方法,通过在运动台定位测量系统内设置吹排装置,所述吹排装置安装在所述运动台上,随运动台移动,所述吹排装置用于向平面光栅表面吹淋离子气体去除光栅表面静电,减少因静电而吸附的颗粒物,保持光栅尺光路洁净度,能对运动台全行程工作场景提供更精确的位置测量;所述吹排装置还可以清洁和带走光栅尺表面颗粒,保持表面洁净度,保持测量精度稳定,减少平面光栅表面吸附颗粒物,保持光栅尺光路洁净度,能够对运动台全行程工作场景提供更精确的位置测量;所述运动台定位测量系统不需要将运动台和平面光栅拖出光刻机进行清洁,保证运动台全行程工作场景,提供更精确的位置测量同时提高工作效率。
附图说明
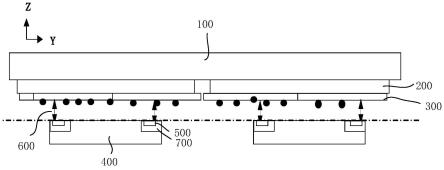
25.图1是本发明实施例的运动台定位测量系统的结构示意图;
26.图2是本发明实施例的运动台定位测量系统的吹排装置原理图;
27.图3是本发明实施例的运动台定位测量系统的气体离子发生单元结构示意图;
28.图4是本发明实施例的运动台定位测量系统的吹排分流块结构下腔盖示意图;
29.图5是本发明实施例的运动台定位测量系统的吹排分流块结构示意图;
30.图6是本发明实施例的运动台定位测量系统的吹排分流块工作过程示意图;
31.图7是本发明实施例的运动台定位测量系统的不连续环形风口上腔盖结构示意图;
32.图8是本发明实施例的运动台定位测量系统的工作方法流程图;
33.图中,
34.100-参考框架;200-光栅安装板;300-平面光栅400-运动台;500-读头;600-光栅尺光路;700-吹排装置;701-气体离子发生单元;702-吹排分流块;703-抽排装置;7011-点
式电离装置;7012-气体流道;7021-下腔盖;7022-进气口;7023-抽排回收口;7024-腔体;7025-上腔盖;7026-环形吹风口。
具体实施方式
35.发明人经研究发现,根据光栅衍射原理,沿垂直于光栅刻线方向运动,可以得到运动方向的位移。为了得到水平向x,y位移,需要两个方向刻线的二维平面光栅。平面光栅与探测装置相对布局,探测装置可以探测到x向+1,-1级衍射光干涉并产生相位差,y向+1,-1级衍射光干涉并产生相位差,从而可以计算出x,y位移。当光栅沿z向移动或探测装置沿z向移动时,探测装置可以探测相位变化,从而可以计算出z向位移。基于一块平面光栅,可以得到x,y,z三个自由度,为了得到多自由度位置信息,需要多块平面光栅和多个探测装置组合在一起实现。
36.运动台定位测量系统主要用于测量运动台x、y、z、rx、ry和rz六个自由度位置信息。为了实现该功能,运动台定位测量系统的参考框架上通常安装有两块光栅安装板,两块光栅安装板上安装有四块平面光栅;每个运动台有4个读头,安装在运动台上,跟随运动台移动。运动台平面光栅刻线方向与运动台上读头的测量方向一致。采用多块光栅和多个读头的组合切换策略,实现光刻机运动台全行程范围内的高精度控制。
37.而平面光栅相对与运动台高速运动时,由于两者之间间距小(10mm左右),平面光栅材质为微晶玻璃,因此光栅会产生静电,造成颗粒吸附,积聚的吸附颗粒会分布在光栅表面的格栅之间,易造成读头技术误差,影响测量及运动台定位精度。
38.本发明基于光刻机中运动台定位测量系统的测量精度控制的需求,提出了一种光刻机、运动台定位测量系统及其工作方法,可以在光栅面积大,数量多,光栅表面洁净度和清洁操作要求高的需求下,实现平面光栅表面静电和工作,确保运动台定位测量系统的测量精度。
39.以下结合附图和具体实施例对本发明提出的光刻机、运动台定位测量系统及其工作方法作进一步详细说明。根据下面说明,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
40.图1是本发明实施例的运动台定位测量系统的结构示意图。如图1所示,本实施例提供一种运动台定位测量系统,所述系统包括参考框架100、光栅安装板200、平面光栅300、运动台400、读头500和吹排装置700。所述平面光栅300安装到所述光栅安装板200上。所述光栅安装板200安装在所述参考框架100上。所述读头500安装在所述运动台400上,并可跟随所述运动台400移动。所述吹排装置700安装在所述运动台400上读头500区域,并可随运动台400移动。所述读头500发出的光源经所述平面光栅300到达所述读头500区域,形成光栅尺光路600。
41.本实施例中,所述运动台定位测量系统至少设置两块光栅安装板200以及两个工作台400。所述光栅安装板200均匀安装在所述参考框架100下方。两个工作台400位于两块光栅安装板200下方。每个运动台400上设置有四个读头500,四个读头500分别设置在所述运动台400的四个角上,这四个读头500可跟随运动台400移动。
42.当需要去除所述平面光栅300上某区域静电及颗粒污染时,所述吹排装置700向所
述平面光栅300吹出一定风速的洁净离子气体,并通过所述吹排装置700的抽排回收动力,实现对光栅表面静电消除的同时带走污染颗粒,从而实现对光栅表面静电消除和污染颗粒抽排。
43.图2是本发明实施例的运动台定位测量系统的吹排装置原理图。如图2所示,所述吹排装置700安装在所述运动台400上,通过所述平面光栅300和所述运动台400间隙向所述平面光栅300吹出一定角度和风速的洁净离子气体,并通过所述吹排装置700的抽排回收动力,实现对光栅表面静电消除的同时带走污染颗粒,保证光栅测量系统测量精度和运动台位置控制精度。
44.本实施例中,所述吹排装置700包括气体离子发生单元701、吹排分流块702和抽排装置703。洁净空气经过所述气体离子发生单元701被所述气体离子发生单元701电离,形成离子化的洁净空气进入所述吹排分流块702,通过所述吹排分流块702的出风口对所述平面光栅300区域吹扫,此洁净空气中的电离子消除所述平面光栅300的静电,同时洁净空气的吹扫力可将所述平面光栅300上的污染颗粒吹离所述平面光栅300的表面。在所述吹排分流块702上设置有和所述抽排装置703相连的抽排口,通过所述抽排装置703回收动力,实现对所述平面光栅300表面静电消除的同时带走污染颗粒。
45.优选方案中,将所述平面光栅300表面静电消除的同时带走污染颗粒的风速计算如下:
46.第一,根据光滑平面上与非光滑表面污染颗粒之间的范德华力学模型可知,所述平面光栅300表面与污染颗粒之间的范德华力近似为:
[0047][0048]
式(1)中:a为范式力系数;r为污染颗粒表面突出状近似半径;r为污染颗粒等效半径;z为污染颗粒几何中心与平面之间距离,ff为平面光栅表面与污染颗粒之间的范德华力。
[0049]
第二,所述平面光栅300表面与污染颗粒静电平衡吸附力的力学模型近似为:
[0050][0051]
式(2)中:ε自由空间介电常数;u为微观电压;r为污染颗粒等效半径;z为污染颗粒几何中心与平面之间距离,fe为平面光栅300表面与污染颗粒静电平衡吸附力。
[0052]
第三,根据伯努利方程可得颗粒所受等效吹扫力为:
[0053]
f=0.25ρπr2v2ꢀꢀꢀ
(3)
[0054]
式(3)中:ρ为颗粒所处区域空气密度;r为污染颗粒表面突出状近似半径;v为吹排装置气流到达平面光栅表面的有效风速,f为颗粒所受等效吹扫力。
[0055]
因此,若使得颗粒吹离平面光栅表面,需要污染颗粒所受风力大于颗粒与光栅平面之间的粘附力(范德华力及静电力),因此可得风速与污染颗粒及静电相关参数关系为:
[0056][0057]
式中:a为范式力系数;r为污染颗粒表面突出状近似半径;r为污染颗粒半径;z为污染颗粒几何中心与平面之间距离;ε自由空间介电常数;u为微观电压;ρ为颗粒所处区域
空气密度;v为吹排装置气流的到达平面光栅表面的有效风速。
[0058]
图3是本发明实施例的运动台定位测量系统的气体离子发生单元结构示意图。如图3所示,所述气体离子发生单元701包括点式电离装置7011和气体流道7012组成。所述气体离子发生单元701作为所述吹排装置700的进气单元,由所述气体流道7012为所述吹排装置700接入一定流量的洁净空气,此洁净空气经过所述点式电离装置7011,形成带有可中和所述平面光栅300表面静电的离子气流,由所述吹排装置700的出风口吹向所述平面光栅300表面。具体的,气体流道7012一端连接空气泵,另一端连接所述点式电离装置7011的进气口,点式电离装置7011的出气口与吹排分流块702连通。
[0059]
图4是本发明实施例的运动台定位测量系统的吹排分流块结构下腔盖示意图,图5是本发明实施例的运动台定位测量系统的吹排分流块结构示意图;请参考图4和图5,所述吹排分流块702包括上腔盖7025、下腔盖7021,所述上腔盖7025和所述下腔盖7021闭合,中间形成腔体7024;所述下腔盖7021上设置有进气口7022,所述进气口7022与所述气体流道7012一端连接,所述上腔盖7025上设置有环形吹风口7026,所述读头500位于所述吹排分流块702的中间,并与所述吹排分流块702的间隙形成抽排回收口7023,所述抽排回收口7023围绕所述读头500区域设置。所述吹排分流块702安装在所述读头500区域可以保护测量区域的所述平面光栅300表面和测量所述光栅尺光路600的洁净度。所述上腔盖7025和所述下腔盖7021为五边形结构,采用所述上腔盖7025和所述下腔盖7021方式,可以通过设计出不同腔盖的出风口尺寸来获得不同出口风速,其中,所述环形吹风口7026的宽度例如是0.5mm-1.5mm,所述环形吹风口7026的角度即为缝隙边缘的倾斜角度,该角度最大角度不大于90度,最小角度由所述运动台400在线工作时与所述平面光栅300的距离决定。
[0060]
图6是本发明实施例的运动台定位测量系统的吹排分流块工作过程示意图。请参考图4至图6,离子化的洁净空气经所述进气口7022到达所述吹排分流块702的腔体7024,经所述环形吹风口7026对所述平面光栅300表面进行吹扫,通过控制所述环形吹风口7026缝隙大小和角度,可以控制吹扫气流的流速和方向,优化吹排效果。为实现风量均匀,还可以设置多处进风口。同时所述环形吹风口7026可形成包围所述读头500区域的气帘,使吹离所述平面光栅300表面的污染物颗粒通过所述抽排回收口7023抽走,不至于扩散到其他位置造成二次污染。
[0061]
图7是本发明实施例的运动台定位测量系统的不连续环形风口上腔盖结构示意图。请参考图7,所述上腔盖7025上的环形吹风口7026还可以由不连续的出风单元组成;所述不连续出风单元的间距范围为所述出风单元宽度的1-5倍,所述出风单元形状例如是间隔的圆形或者细长缝状,以便提高出口风速。具体的,所述上腔盖7025用于气流导流,使所述腔体7024中的气流以一定的速度和角度吹向平面光栅表面,此气流用于克服污染颗粒与所述平面光栅300之间的粘附力(主要为范德华力),将颗粒物吹离所述平面光栅300表面,同时所述上腔盖7025结构的细长环形出风口,可以形成包围所述读头500区域的气帘,较少污染颗粒的扩散。使吹离所述平面光栅300表面的污染物颗粒通过所述吹排分流块702的抽排回收口7023抽走,不至于扩散到其他位置造成二次污染。通过仿真分析发现不连续环形出风口的优化结构,在增加气流出口流速同时,减小气流对光栅平面的干扰。
[0062]
基于同一发明构思,本实施例还提供一种光刻机,采用上述所述的运动台定位测量系统,所述光刻机例如是浸没式光刻机。
[0063]
请参考图8,图8是本发明实施例的运动台定位测量系统的工作方法流程图;基于同一发明构思,本发明还提供一种运动台定位测量系统的工作方法,包括:
[0064]
步骤一,运动台定位测量系统的光源发射出光;
[0065]
步骤二,吹排装置向平面光栅吹出电离后的洁净空气,减少所述平面光栅300表面静电和污染颗粒积累;
[0066]
步骤三,光栅测量误差是否满足误差阈值,当光栅测量误差满足误差阈值,执行步骤四,当光栅测量误差不满足误差阈值,进入测量系统维护状态,所述测量系统维护状态包括,吹排装置启动吹排功能,将污染颗粒吹离并抽走,继续执行步骤二;可经过重复吹扫多次,直到光栅测量误差满足误差阈值。
[0067]
步骤四,运动台定位测量系统继续工作。
[0068]
综上可见,本实施例光刻机、运动台定位测量系统及其工作方法,可对平面光栅进行清洁的吹排装置,可以为平面光栅提供离子气流,用于消除平面光栅上的静电,减少静电对颗粒物的吸附,保证系统测量准确性;另一方面吹排装置可以为平面光栅提供一定压力和流速的洁净气体,用于带走平面光栅上的污染颗粒,减少颗粒物对光栅测量的影响,保证运动台位置测量的精确性。
[0069]
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1