成像镜头、取像装置与电子装置的制作方法
1.本实用新型涉及一种成像镜头、取像装置以及电子装置,特别是一种适用于电子装置的成像镜头及取像装置。
背景技术:
2.随着半导体工艺技术更加精进,使得电子感光元件性能可容纳更多的像素,因此,具备高成像品质的光学镜头俨然成为不可或缺的一环。此外,随着科技日新月异,配备光学镜头的电子装置的应用范围更加广泛,对于光学镜头的要求也是更加多样化。
3.然而,为了提升光学镜头的解像能力,则需要将更多的透镜及其他光学元件应用在光学镜头中。这将导致在点胶工艺中,容许误差会大幅降低到很小的范围,进而造成点胶工艺的困难度大幅提升。因此,如何改良光学镜头的结构,以供精确地点胶,已成为目前光学领域的重要议题。
技术实现要素:
4.鉴于以上提到的问题,本实用新型揭露一种成像镜头、取像装置与电子装置,有助于在点胶工艺中能够被光学辨识系统探测而及时回馈当下的点胶状况,借以得到具有良好粘着状态光学元件的成像镜头。
5.本实用新型提供一种成像镜头,具有一光轴。成像镜头包含多个光学元件、一镜筒、一光学辨识结构以及一可固化液体。所述多个光学元件沿光轴排列。镜筒环绕光轴,且所述多个光学元件的至少其中一者收纳于镜筒。光学辨识结构设置于镜筒,且光学辨识结构包含多个光学辨识单元。所述多个光学辨识单元沿环绕光轴的一圆周方向相邻地排列。每一个光学辨识单元包含一第一光学辨识面。可固化液体设置于光学辨识结构,且可固化液体与所述多个光学辨识单元的至少其中一者实体接触。可固化液体在固化后将镜筒与相邻于光学辨识结构的所述多个光学元件的其中一者彼此接合。每一个第一光学辨识面在垂直于光轴的一参考面上的投影面积为a,所述多个第一光学辨识面中在圆周方向上的相邻两者各自的图形中心沿圆周方向的间隔距离为d,其满足下列条件:
6.0.001[平方毫米]≤a≤0.072[平方毫米];以及
[0007]
0.03[毫米]≤d≤1.0[毫米]。
[0008]
本实用新型提供一种成像镜头,具有一光轴。成像镜头包含多个光学元件、一镜筒、一光学辨识结构以及一可固化液体。所述多个光学元件沿光轴排列,且所述多个光学元件至少包含一第一光学元件以及一第二光学元件。镜筒环绕光轴,且所述多个光学元件收纳于镜筒。光学辨识结构设置于第一光学元件,且光学辨识结构朝向第二光学元件。光学辨识结构包含多个光学辨识单元。所述多个光学辨识单元沿环绕光轴的一圆周方向相邻地排列。每一个光学辨识单元包含一第一光学辨识面。可固化液体设置于光学辨识结构,且可固化液体与所述多个光学辨识单元的至少其中一者实体接触。可固化液体在固化后将第一光学元件与第二光学元件彼此接合。每一个第一光学辨识面在垂直于光轴的一参考面上的投
影面积为a,所述多个第一光学辨识面中在圆周方向上的相邻两者各自的图形中心沿圆周方向的间隔距离为d,其满足下列条件:
[0009]
0.001[平方毫米]≤a≤0.072[平方毫米];以及
[0010]
0.03[毫米]≤d≤1.0[毫米]。
[0011]
本实用新型提供一种成像镜头,具有一光轴。成像镜头包含多个光学元件、一镜筒、一光学辨识结构以及一可固化液体。所述多个光学元件沿光轴排列,且所述多个光学元件至少包含一非圆形元件。非圆形元件包含一承靠部。承靠部环绕光轴。镜筒环绕光轴,且所述多个光学元件收纳于镜筒。非圆形元件的承靠部于一第一方向上与镜筒实体接触,且承靠部于一第二方向上具有至少一切面,其中第一方向由垂直于光轴的一第一轴与光轴的交点沿第一轴的其中一个远离光轴的方向所定义,第二方向由垂直于光轴的一第二轴与光轴的交点沿第二轴的其中一个远离光轴的方向所定义,且第一轴不同于第二轴。光学辨识结构于第一方向上设置于承靠部,光学辨识结构沿环绕光轴的一圆周方向朝向第二轴延伸。光学辨识结构包含多个光学辨识单元。所述多个光学辨识单元沿圆周方向相邻地排列。每一个光学辨识单元包含一第一光学辨识面。可固化液体设置于光学辨识结构,且可固化液体与所述多个光学辨识单元的至少其中一者实体接触。可固化液体在固化后将非圆形元件与镜筒彼此接合。每一个第一光学辨识面在垂直于光轴的一参考面上的投影面积为a,所述多个第一光学辨识面中在圆周方向上的相邻两者各自的图形中心沿圆周方向的间隔距离为d,其满足下列条件:
[0012]
0.001[平方毫米]≤a≤0.072[平方毫米];以及
[0013]
0.03[毫米]≤d≤1.0[毫米]。
[0014]
本实用新型提供一种取像装置,包含上述成像镜头。
[0015]
本实用新型提供一种电子装置,包含上述取像装置以及一电子感光元件,其中电子感光元件设置于成像镜头的成像面上。
[0016]
当a满足上述条件时,可使第一光学辨识面具有足够的面积范围,以利于被光学辨识系统探测。
[0017]
当d满足上述条件时,可使得在圆周方向上相邻的两个第一光学辨识面之间具有足够的距离范围,以利于被光学辨识系统分辨。
[0018]
以上关于本实用新型内容的说明及以下实施方式的说明是用以示范与解释本实用新型的原理,并且提供本实用新型的专利申请范围更进一步的解释。
附图说明
[0019]
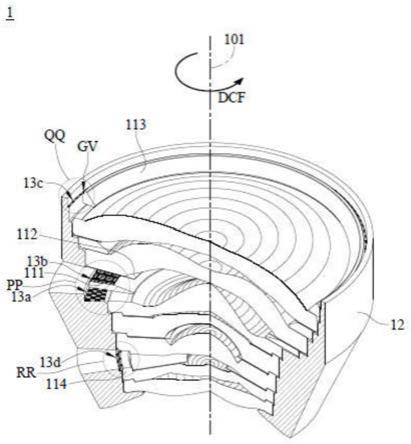
图1绘示依照本实用新型第一实施例的成像镜头的侧视剖面示意图。
[0020]
图2绘示图1的成像镜头经部分剖切的立体示意图。
[0021]
图3绘示图2的成像镜头的pp区域中光学辨识结构经设置可固化液体的局部放大示意图。
[0022]
图4绘示图1的成像镜头沿w
‑
w剖切线的剖面示意图。
[0023]
图5绘示图1的成像镜头沿x
‑
x剖切线的剖面示意图。
[0024]
图6绘示图2的成像镜头的qq区域中光学辨识结构经设置可固化液体的局部放大示意图。
[0025]
图7绘示图1的成像镜头沿y
‑
y剖切线的剖面示意图。
[0026]
图8绘示图2的成像镜头的rr区域中光学辨识结构经设置可固化液体的局部放大示意图。
[0027]
图9绘示图1的成像镜头沿z
‑
z剖切线的剖面示意图。
[0028]
图10绘示依照本实用新型第二实施例的成像镜头的立体示意图。
[0029]
图11绘示图10的成像镜头的正视示意图。
[0030]
图12绘示图10的成像镜头的侧视示意图。
[0031]
图13绘示图10的成像镜头的后视示意图。
[0032]
图14绘示图11的成像镜头的ss区域中光学辨识结构经设置可固化液体的局部放大示意图。
[0033]
图15绘示图10的成像镜头的镜筒与其中一个光学元件于像侧的分解示意图。
[0034]
图16绘示图13的成像镜头的tt区域中光学辨识结构经设置可固化液体的局部放大示意图。
[0035]
图17绘示依照本实用新型第三实施例的成像镜头的正视示意图。
[0036]
图18绘示图17的成像镜头的侧视示意图。
[0037]
图19绘示图17的成像镜头的后视示意图。
[0038]
图20绘示图17的成像镜头的uu区域的局部放大示意图。
[0039]
图21绘示图20的成像镜头的光学辨识结构经设置可固化液体的示意图。
[0040]
图22绘示依照本实用新型第四实施例的一种取像装置的立体示意图。
[0041]
图23绘示依照本实用新型第五实施例的一种电子装置的立体示意图。
[0042]
图24绘示图23的电子装置的另一侧的立体示意图。
[0043]
图25绘示图23的电子装置的系统方块图。
[0044]
图26绘示图23的电子装置以介于11mm至14mm之间的等效焦距所撷取到的影像示意图。
[0045]
图27绘示图23的电子装置以介于20mm至40mm之间的等效焦距所撷取到的影像示意图。
[0046]
图28绘示图23的电子装置以介于100mm至150mm之间的等效焦距所撷取到的影像示意图。
[0047]
图29绘示图23的电子装置以介于400mm至600mm之间的等效焦距所撷取到的影像示意图。
[0048]
图30绘示依照本实用新型的一实施例中参数θ的示意图。
[0049]
图31绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。
[0050]
图32绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。
[0051]
图33绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。
[0052]
图34绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。
[0053]
图35绘示图34的光学辨识结构经设置可固化液体的示意图。
[0054]
图36绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。
[0055]
图37绘示图36的光学辨识结构经设置可固化液体的示意图。
[0056]
图38绘示依照本实用新型的再一实施例中平面式光学辨识结构的示意图。
[0057]
图39绘示依照本实用新型的再一实施例中平面式光学辨识结构的示意图。
[0058]
图40绘示依照本实用新型的再一实施例中平面式光学辨识结构的示意图。
[0059]
【符号说明】
[0060]
1、2、3
…
成像镜头;
[0061]
101、201、301
…
光轴;
[0062]
102、202、302
…
成像面;
[0063]
11、21、31
…
光学元件;
[0064]
111
…
第一光学元件;
[0065]
112
…
第二光学元件;
[0066]
113
…
第三光学元件;
[0067]
114
…
第四光学元件;
[0068]
216、316
…
物侧光学元件;
[0069]
217、317
…
像侧光学元件;
[0070]
2161、2171、3161、3171
…
光学部;
[0071]
2162、2172、3162、3172
…
承靠部;
[0072]
2163、2173、3163、3173
…
切面;
[0073]
12、22、32
…
镜筒;
[0074]
13a、13b、13c、13d、23o、23i、33o、33i、tois、tois1、tois2、tois3、 tois4、tois6、tois7、tois8
…
光学辨识结构;
[0075]
130a、130b、130c、130d、230o、230i、330o、330i、tois1_0、tois2_0、 tois3_0、tois4_0、tois6_0、tois7_0、tois8_0
…
光学辨识单元;
[0076]
131a、131b、131c、131d、231o、231i、331o、331i、tois1_1、tois2_1、 tois3_1、tois4_1、tois6_1、tois7_1、tois8_1
…
第一光学辨识面;
[0077]
132a、132b、132c、132d、232o、232i、332i、tois1_2、tois2_2、tois3_2、 tois6_2、tois7_2、tois8_2
…
第二光学辨识面;
[0078]
133a、133b、tois2_3、tois6_3、tois7_3、tois8_3
…
第三光学辨识面;
[0079]
134a、134b、tois2_4、tois6_4、tois7_4、tois8_4
…
第四光学辨识面;
[0080]
135b、tois7_5
…
第五光学辨识面;
[0081]
136b、tois7_6
…
第六光学辨识面;
[0082]
137b、tois7_7
…
第七光学辨识面;
[0083]
138b、tois7_8
…
第八光学辨识面;
[0084]
339o、tois4_9
…
凹陷结构;
[0085]
14a、14b、14c、14d、24o、24i、34o、34i、cl
…
可固化液体;
[0086]
19、cois
…
对应光学辨识结构;
[0087]
190
…
对应光学辨识单元;
[0088]
191
…
第一对应光学辨识面;
[0089]
192
…
第二对应光学辨识面;
[0090]
4、5a、5b、5c、5d、5e、5f、5g
…
取像装置;
[0091]
42
…
驱动装置;
[0092]
43、is
…
电子感光元件;
[0093]
44
…
影像稳定模块;
[0094]5…
电子装置;
[0095]
5h
…
提示灯;
[0096]
52
…
闪光灯模块;
[0097]
53
…
对焦辅助模块;
[0098]
54
…
影像信号处理器;
[0099]
55
…
使用者介面;
[0100]
551
…
拍摄按钮;
[0101]
552
…
影像回放按键;
[0102]
553
…
取像装置切换按键;
[0103]
554
…
集成选单按键;
[0104]
56
…
影像软件处理器;
[0105]
57、cb
…
电路板;
[0106]
571
…
连结器;
[0107]
58
…
电子元件;
[0108]
581
…
信号发射模块;
[0109]
582
…
存储器;
[0110]
583
…
随机存储器;
[0111]
584
…
陀螺仪;
[0112]
585
…
位置定位器;
[0113]
59
…
单晶片系统;
[0114]9…
光学辨识系统;
[0115]
ax1
…
第一轴;
[0116]
ax2
…
第二轴;
[0117]
d1
…
第一方向;
[0118]
d2
…
第二方向;
[0119]
daf
…
远离光轴的方向;
[0120]
dcf
…
圆周方向;
[0121]
dob
…
观察方向;
[0122]
eois
…
等效光学辨识面;
[0123]
gv
…
凹槽;
[0124]
lb2
…
第二镜筒;
[0125]
obj
…
被摄物;
[0126]
ofe
…
光轴转折元件;
[0127]
a
…
第一光学辨识面在垂直于光轴的参考面上的投影面积;
[0128]
aap
…
第一对应光学辨识面在垂直于光轴的参考面上的投影面积;
[0129]
d
…
第一光学辨识面中在圆周方向上的相邻两者各自的图形中心沿圆周方向的间隔距离;
[0130]
dap
…
第一对应光学辨识面中在圆周方向上的相邻两者各自的图形中心沿圆周方向的间隔距离;
[0131]
δh
…
每一光学辨识单元中的第一光学辨识面与第二光学辨识面于光轴方向上的高度差值;
[0132]
θ
…
观察方向与光学辨识结构的夹角;
[0133]
φ
…
每一光学辨识单元中的第一光学辨识面与第二光学辨识面的相交角度。
具体实施方式
[0134]
以下在实施方式中详细叙述本实用新型的详细特征以及优点,其内容足以使任何本领域技术人员了解本实用新型的技术内容并据以实施,且根据本说明书所揭露的内容、申请专利范围及附图,任何本领域技术人员可轻易地理解本实用新型相关的目的及优点。以下的实施例进一步详细说明本实用新型的观点,但非以任何观点限制本实用新型的范畴。
[0135]
本实用新型提供一种成像镜头,具有一光轴。成像镜头包含多个光学元件以及一个镜筒。所述多个光学元件沿光轴排列。镜筒环绕光轴,且所述多个光学元件的至少其中一者收纳于镜筒。此外,所述多个光学元件也可皆收纳于镜筒。
[0136]
具体来说,所述多个光学元件可至少包含一片透镜、一片面镜、一光轴转折元件、一遮光元件、一空间间隔元件或一固定件等等,但本实用新型不以此为限。在一种实施态样中,光学元件可至少包含一非圆形元件。非圆形元件包含一承靠部。承靠部环绕光轴。承靠部于一第一方向上与镜筒实体接触,且承靠部于一第二方向上具有至少一切面。此外,承靠部可于第二方向上与镜筒实体接触。其中,所述第一方向由垂直于光轴的一第一轴与光轴的交点沿第一轴的其中一个远离光轴的方向所定义,所述第二方向由垂直于光轴的一第二轴与光轴的交点沿第二轴的其中一个远离光轴的方向所定义,且第一轴不同于第二轴。请参照图13与图15,是绘示有本实用新型第二实施例的成像镜头2的非圆形元件(像侧光学元件217) 与镜筒22于像侧的示意图。从图13与图15中可看出非圆形元件(像侧光学元件 217)于第一方向d1上可实体接触于镜筒22,且非圆形元件于第二方向d2上具有切面2173,其中第一方向d1与第二方向d2实质上正交。
[0137]
成像镜头还包含一光学辨识结构。光学辨识结构包含多个光学辨识单元。所述多个光学辨识单元沿环绕光轴的圆周方向相邻地排列。在一种实施态样中,光学辨识结构可设置于镜筒。此外,光学辨识结构可垂直于光轴。此外,光学辨识结构可朝向物侧或像侧。请参照图2与图3,是绘示有本实用新型第一实施例的成像镜头1的镜筒12上所设置的光学辨识结构13a,且光学辨识结构13a垂直于光轴101。
[0138]
在另一种实施态样中,所述多个光学元件可至少包含一第一光学元件以及一第二光学元件。光学辨识结构可设置于第一光学元件,并且可朝向第二光学元件。此外,第二光学元件于光轴方向上可覆盖住至少一部分的光学辨识结构。请参照图2与图3,是绘示有本实用新型第一实施例的成像镜头1的第一光学元件111上所设置的光学辨识结构13b,且光学辨识结构13b于光轴101方向上被第二光学元件112覆盖住至少一部分。
[0139]
在又一种实施态样中,光学辨识结构可于第一方向上设置于非圆形元件的承靠部,且光学辨识结构可沿环绕光轴的一圆周方向朝向第二轴延伸。此外,光学辨识结构可从
第一轴沿圆周方向往与第一轴垂直的第二轴渐缩。此外,光学辨识结构可呈弧形。请参照图11,是绘示有本实用新型第二实施例的成像镜头2的非圆形元件(物侧光学元件216)的承靠部2162上于第一方向d1所设置的光学辨识结构23o,且光学辨识结构23o呈弧形地从第一轴ax1沿圆周方向dcf往第二轴ax2延伸并渐缩。请参照图17,是绘示有本实用新型第三实施例的成像镜头3 的非圆形元件(物侧光学元件316)的承靠部3162上于第一方向d1所设置的光学辨识结构33o,且光学辨识结构33o呈弧形地从第一轴ax1沿圆周方向dcf往第二轴ax2延伸并渐缩。
[0140]
成像镜头还包含一可固化液体。可固化液体设置于光学辨识结构,且可固化液体与所述多个光学辨识单元的至少其中一者实体接触。可固化液体是指液体固化后所形成的物件。可固化液体可为粘着剂;借此,有利于在固化后提供将相邻元件固定的接合力。或者,可固化液体也可为被有机溶剂溶化的液态塑胶;借此,利用涂布有机溶剂,可将相邻元件的相邻塑胶材质表面溶化,并在经溶化的液态塑胶固化后与所述相邻元件合为一体。其中,有机溶剂可例如但不限于丙酮、丁酮、氯仿。
[0141]
在光学辨识结构设置于镜筒的态样中,可固化液体在固化后将镜筒与相邻于光学辨识结构的其中一个光学元件彼此接合。此外,所述其中一个光学元件可于光轴方向上朝向光学辨识结构,并与可固化液体实体接触,且可固化液体在固化后将镜筒与所述其中一个光学元件在垂直于光学辨识结构的方向上彼此接合。请参照图3,是绘示有本实用新型第一实施例的成像镜头1的镜筒12的光学辨识结构13a上所设置的可固化液体14a,且可固化液体14a在固化后将镜筒12与相邻的第一光学元件111在垂直于光学辨识结构13a的方向上彼此接合。
[0142]
在光学辨识结构设置于第一光学元件的态样中,可固化液体在固化后将第一光学元件与第二光学元件彼此接合。请参照图3,是绘示有本实用新型第一实施例的成像镜头1的镜筒12的光学辨识结构13b上所设置的可固化液体14b,且可固化液体14b在固化后将第一光学元件111与第二光学元件112彼此接合。
[0143]
在光学辨识结构设置于非圆形元件的承靠部的态样中,可固化液体在固化后将非圆形元件与镜筒彼此接合。请参照图14,是绘示有本实用新型第二实施例的成像镜头2的镜筒22的光学辨识结构23o上所设置的可固化液体24o,且可固化液体24o在固化后将非圆形元件(物侧光学元件216)与镜筒22彼此接合。请参照图21,是绘示有本实用新型第三实施例的成像镜头3的镜筒32的光学辨识结构 33o上所设置的可固化液体34o,且可固化液体34o在固化后将非圆形元件(物侧光学元件316)与镜筒32彼此接合。
[0144]
光学辨识结构的每一个光学辨识单元包含一第一光学辨识面。在每一个光学辨识单元中,第一光学辨识面于一方向上可与光学辨识单元的其他部分具有相异的光泽度。借此,有利于标示出待点胶的位置,并能及时回馈当下的点胶状况。详细来说,前述的可固化液体可用于点胶,且可固化液体与第一光学辨识面接触时会改变第一光学辨识面的光泽度。因此,在点胶工艺中,可通过光学辨识方法获取光学辨识结构表面上的讯息,此讯息可为可固化液体的实际位置、填充量多寡以及流向等等,借以能在点胶工艺将当下的点胶状况与目标的点胶结果及时对照并及时修正。如此一来,可避免点胶不全或是溢胶等瑕疵发生,进一步提高点胶工艺的合格率与准确度以提升后续的组装工艺的速度,并减少可固化液体对非点胶处的污染。其中,可固化液体可以通过覆盖、腐蚀、改变表面微结构或染色等
方式,来改变第一光学辨识面的光泽度,但本实用新型不以此为限。
[0145]
进一步来说,可固化液体在固化后也可改变第一光学辨识面的光泽度。借此,可通过光学辨识方法确认可固化液体是否已有效将元件接合。
[0146]
每一个第一光学辨识面在垂直于光轴的参考面上的投影面积为a,其满足下列条件:0.001[平方毫米]≤a≤0.072[平方毫米]。借此,可使第一光学辨识面具有足够的面积范围,以利于被光学辨识系统探测。其中,也可满足下列条件:0.002 [平方毫米]≤a≤0.042[平方毫米]。请参照图4,是绘示有本实用新型第一实施例的参数a的示意图。
[0147]
第一光学辨识面中在圆周方向上的相邻两者各自的图形中心沿圆周方向的间隔距离为d,其满足下列条件:0.03[毫米]≤d≤1.0[毫米]。借此,可使得在圆周方向上相邻的两个第一光学辨识面之间具有足够的距离范围,以利于被光学辨识系统分辨。其中,第一光学辨识面的图形中心是指第一光学辨识面范围的几何中心。请参照图4,是绘示有本实用新型第一实施例的参数d的示意图。
[0148]
每一个第一光学辨识面在垂直于光轴的参考面上的投影面积为a,第一光学辨识面中在圆周方向上的相邻两者各自的图形中心沿圆周方向的间隔距离为d,其可满足下列条件:借此,可将第一光学辨识面面积及相邻两个第一光学辨识面图形中心间隔距离的无因次关系式定义为一辨识度因子,并配合适当间隔距离与面积的第一光学辨识面,以在搜集点胶填充量信息的同时,显示出可固化液体分布状态以及流向。其中,也可满足下列条件:
[0149]
每一个光学辨识单元还可包含一第二光学辨识面,且每一个光学辨识单元中的第一光学辨识面与第二光学辨识面相邻地排列。第一光学辨识面与第二光学辨识面于一方向上具有相异的光泽度。其中,第一光学辨识面与第二光学辨识面可以通过不同的表面粗糙度、不同方向的表面微结构、高低差、角度差等实现于一方向上具有相异的光泽度,但本实用新型不以此为限。
[0150]
可从一观察方向检视本实用新型所揭露的光学辨识结构。观察方向与光学辨识结构的夹角为θ,每一光学辨识单元中的第一光学辨识面与第二光学辨识面于观察方向上的光泽度差值为δg,其可满足下列条件:50[度]≤θ≤90[度];以及15[光泽单位]≤δg≤50[光泽单位]。借此,第一光学辨识面与第二光学辨识面能通过其光泽度差值,而能够被光学辨识系统辨别;原理为通过光线照射表面后,光线的反射率换算可得到该表面的光泽度,光泽度越高则代表光线越容易被该表面所反射。若θ为60度,则对应量测范围为0~1000光泽单位(gloss unit)。举例来说,若第一光学辨识面与第二光学辨识面分别于θ为60度的观察方向上测得的反射率为0.5%以及3%,则可得知第一光学辨识面与第二光学辨识面的光泽度为5光泽单位及30光泽单位,两者相差25光泽单位,符合上述条件式「15[光泽单位]≤δg ≤50[光泽单位]」。其中,θ也可为85度,则对应量测范围为0~160光泽单位。请参照图30,是绘示有本实用新型的一实施例的光学辨识结构tois由光学辨识系统9沿夹角为θ的观察方向dob所观察的示意图。
[0151]
下表为光学辨识系统,在50[度]≤θ≤90[度];以及15[光泽单位]≤δg≤50 [光泽单位]的辨识环境下,可识别相同表面结构的光学辨识面在不同面积(即上述 a)及不同间距(即上述d)下的实验数据,其中下表的实验数据皆可被光学辨识系统所识别,且点胶后
的光学辨识面可以进一步被光学辨识系统所检测。
[0152][0153][0154]
每一光学辨识单元中的第一光学辨识面与第二光学辨识面于一方向上的粗糙度差值为δr,其可满足下列条件:0.01[微米]≤δr≤3.5[微米]。借此,第一光学辨识面与第二光学辨识面可通过相异的粗糙度,而产生相异的光泽度,进而能够被光学辨识系统辨别。由于在切削工艺中,可于不同方向产生相异的粗糙度,因此同样的表面在不同方向上所量测到的粗糙度会有所不同。第一光学辨识面与第二光学辨识面可通过不同的切削方向,而于同一个量测粗糙度的方向上具有相异的粗糙度,进而产生相异的光泽度。在本实用新型中,若未特别说明,则粗糙度皆是指「算数平均粗糙度ra」。
[0155]
每一光学辨识单元中的第一光学辨识面与第二光学辨识面于光轴方向上的高度差值为δh,其可满足下列条件:0.001[毫米]≤δh≤0.1[毫米]。借此,可进一步引导可固化液体的流动,将可固化液体滞留于较低的光学辨识面,以提升点胶辨识的效果,并且通过光学辨识单元被可固化液体覆盖的比例来推估可固化液体当下的填充量。请参照图3,是绘示有本实用新型第一实施例的参数δh的示意图。
[0156]
每一光学辨识单元中的第一光学辨识面与第二光学辨识面的相交角度为φ,其可满足下列条件:5[度]≤φ≤75[度]。借此,可通过改变反射观察方向光线的角度,产生表面光泽度的差异。请参照图8,是绘示有本实用新型第一实施例的参数φ的示意图。
[0157]
其中一个光学元件与镜筒在垂直于光轴的方向上可彼此实体接触并于其间可形成一凹槽,光学辨识结构位于凹槽,且可固化液体可收纳于凹槽,以在固化后将镜筒与所述其中一个光学元件的一部分彼此接合。借此,可确保可固化液体的流向,并确保可固化液体固化后不会占用到光轴方向上的组装厚度。请参照图6,是绘示有本实用新型第一实施例的成像镜头1的第三光学元件113与镜筒12之间的凹槽gv,光学辨识结构13c位于凹槽gv,且可固化液体14c收纳于凹槽gv。
[0158]
根据本实用新型所揭露的成像镜头,还可包含一对应光学辨识结构。对应光学辨识结构可设置于其中一个光学元件,且对应光学辨识结构包含多个对应光学辨识单元。对应光学辨识结构的所述多个对应光学辨识单元可与光学辨识结构的所述多个光学辨识单元对应设置。借此,在镜筒与光学元件分别设置有光学辨识单元与对应光学辨识单元,可进
一步检测可固化液体于光学元件的分布,避免向光轴方向溢流,影响光学元件的成像品质。此外,光学辨识单元与对应光学辨识单元可设置于前述凹槽的相对两侧。请参照图8,是绘示有本实用新型第一实施例的成像镜头1的第四光学元件114上所设置的对应光学辨识结构19,且对应光学辨识结构19的多个对应光学辨识单元190与镜筒12上所设置的光学辨识结构13d 的多个光学辨识单元130d彼此为斜面对平面的方式对应设置。
[0159]
光学辨识单元可沿远离光轴的方向延伸地排列,且光学辨识结构可呈网格状。借此,光学辨识单元能够沿着圆周方向与径向方向分布,以延伸成网格状的外观,进而能够更加容易地被光学辨识系统辨别。请参照图2至图4,是绘示有本实用新型第一实施例的光学辨识结构13a的光学辨识单元130a,且光学辨识单元130a沿圆周方向dcf与沿远离光轴101的方向排列,以呈网格状的外观。
[0160]
每一个光学辨识单元还可包含一凹陷结构,且每一个光学辨识单元中的第一光学辨识面与凹陷结构相邻地排列。借此,利用凹陷结构其不易反光的特性,可与相邻的第一光学辨识面具有光泽度上的差异,进而能够被光学辨识系统辨别。此外,可固化液体也可收纳于凹陷结构。此外,凹陷结构在垂直于光轴的参考面上的投影定义出一等效光学辨识面。等效光学辨识面的面积与每一个光学辨识单元于所述参考面上的投影面积占比为ar,其可满足下列条件:0.2≤ar≤0.8。其中,也可满足下列条件:0.25≤ar≤0.75。请参照图17与图20,是绘示有本实用新型第三实施例的成像镜头3的光学辨识单元330o的凹陷结构339o,且凹陷结构 339o的范围定义出等效光学辨识面eois。
[0161]
上述本实用新型成像镜头中的各技术特征皆可组合配置,而达到对应的功效。
[0162]
根据上述实施方式,以下提出具体实施例并配合附图予以详细说明。
[0163]
<第一实施例>
[0164]
请参照图1至图9,其中图1绘示依照本实用新型第一实施例的成像镜头的侧视剖面示意图,图2绘示图1的成像镜头经部分剖切的立体示意图,图3绘示图2 的成像镜头的pp区域中光学辨识结构经设置可固化液体的局部放大示意图,图4 绘示图1的成像镜头沿w
‑
w剖切线的剖面示意图,图5绘示图1的成像镜头沿 x
‑
x剖切线的剖面示意图,图6绘示图2的成像镜头的qq区域中光学辨识结构经设置可固化液体的局部放大示意图,图7绘示图1的成像镜头沿y
‑
y剖切线的剖面示意图,图8绘示图2的成像镜头的rr区域中光学辨识结构经设置可固化液体的局部放大示意图,且图9绘示图1的成像镜头沿z
‑
z剖切线的剖面示意图。
[0165]
在本实施例中,成像镜头1具有一光轴101以及一成像面102。成像镜头1包含多个光学元件11以及一镜筒12。光学元件11沿光轴101排列。镜筒12环绕光轴101,且光学元件11皆收纳于镜筒12。
[0166]
具体来说,光学元件11包含一第一光学元件111、一第二光学元件112、一第三光学元件113以及一第四光学元件114。详细来说,第一光学元件111为一空间间隔元件,第二光学元件112为一遮光片,第三光学元件113为一固定件,第四光学元件114为一片透镜,且沿光路方向从物侧到像侧依序为第四光学元件114、第一光学元件111、第二光学元件112与第三光学元件113。
[0167]
成像镜头1还包含四个光学辨识结构13a、13b、13c、13d。光学辨识结构13a 设置于镜筒12,光学辨识结构13a垂直于光轴101,且光学辨识结构13a朝向第一光学元件111。光学辨识结构13b设置于第一光学元件111,光学辨识结构13b垂直于光轴101,光学辨识结构13b
朝向第二光学元件112,且光学辨识结构13b于光轴101方向上至少有一部分由第二光学元件112所覆盖住。光学辨识结构13c 设置于镜筒12并位于镜筒12与第三光学元件113之间所形成的凹槽gv,光学辨识结构13c垂直于光轴101,且光学辨识结构13c朝向成像面102。光学辨识结构 13d设置于镜筒12,且光学辨识结构13d位于镜筒12与第四光学元件114之间所形成的凹槽gv。
[0168]
光学辨识结构13a为平面式光学辨识结构,其包含多个光学辨识单元130a。光学辨识结构13b为平面式光学辨识结构,其包含多个光学辨识单元130b。光学辨识结构13c为平面式光学辨识结构,其包含多个光学辨识单元130c。光学辨识结构13d为立体式光学辨识结构,其包含多个光学辨识单元130d。
[0169]
每一个光学辨识单元130a包含一第一光学辨识面131a、一第二光学辨识面132a、一第三光学辨识面133a以及一第四光学辨识面134a。第一光学辨识面131a 与第二光学辨识面132a于环绕光轴101的圆周方向dcf上相邻地排列。第三光学辨识面133a与第四光学辨识面134a于圆周方向dcf上相邻地排列,且较第一光学辨识面131a与第二光学辨识面132a靠近光轴101。也就是说,每一个光学辨识单元130a中,第一光学辨识面131a、第二光学辨识面132a、第三光学辨识面133a 与第四光学辨识面134a可被视为2
×
2的矩阵排列。光学辨识单元130a沿圆周方向dcf与沿远离光轴101的方向相邻地排列,使得光学辨识结构13a呈网格状的外观。
[0170]
如图4所示,其中一个第一光学辨识面131a在垂直于光轴101的参考面上的投影面积为a,其满足下列条件:a=2.2
×
10e
‑
2[平方毫米]。
[0171]
如图4所示,第一光学辨识面131a中在圆周方向dcf上的其中相邻两者各自的图形中心沿圆周方向dcf的间隔距离为d,其满足下列条件:d=0.273[毫米]。此处所指的「第一光学辨识面131a中在圆周方向dcf上的其中相邻两者」,是为与光轴101实质上等距离的相邻两个第一光学辨识面131a。
[0172]
其中一个第一光学辨识面131a在垂直于光轴101的参考面上的投影面积为a,第一光学辨识面131a中在圆周方向dcf上的其中相邻两者各自的图形中心沿圆周方向dcf的间隔距离为d,其满足下列条件:
[0173]
第一光学辨识面131a与第二光学辨识面132a于一方向上具有相异的光泽度,第一光学辨识面131a与第三光学辨识面133a于一方向上具有相同的光泽度,且第二光学辨识面132a与第四光学辨识面134a于一方向上具有相同的光泽度。
[0174]
一观察方向与光学辨识结构13a的夹角为θ,其满足下列条件:50[度]≤θ≤90 [度]。每一光学辨识单元130a中的第一光学辨识面131a与第二光学辨识面132a 于观察方向上的光泽度差值为δg,其满足下列条件:15[光泽单位]≤δg≤50[光泽单位]。
[0175]
第一光学辨识面131a于一方向上的算数平均粗糙度ra小于0.1微米,且第二光学辨识面132a于同一方向上的算数平均粗糙度ra介于0.3至0.5微米之间。每一光学辨识单元130a中的第一光学辨识面131a与第二光学辨识面132a于同一方向上的粗糙度差值为δr,其满足下列条件:0.2[微米]≤δr≤0.5[微米]。
[0176]
成像镜头1还包含一可固化液体14a。可固化液体14a设置于光学辨识结构13a,且可固化液体14a实体接触于第一光学辨识面131a、第二光学辨识面132a、第三光学辨识面133a与第四光学辨识面134a。可固化液体14a在固化后将镜筒12与第一光学元件111在垂直
于光学辨识结构13a的方向上彼此接合。
[0177]
每一个光学辨识单元130b包含一第一光学辨识面131b、一第二光学辨识面 132b、一第三光学辨识面133b、一第四光学辨识面134b、一第五光学辨识面135b、一第六光学辨识面136b、一第七光学辨识面137b以及一第八光学辨识面138b。第一光学辨识面131b、第四光学辨识面134b、第八光学辨识面138b与第七光学辨识面137b于环绕光轴101的圆周方向dcf上相邻地排列。第二光学辨识面132b 与第三光学辨识面133b于圆周方向dcf上相邻地排列,且较第一光学辨识面131b、第四光学辨识面134b、第八光学辨识面138b与第七光学辨识面137b远离光轴101。第五光学辨识面135b与第六光学辨识面136b于圆周方向dcf上相邻地排列,且较第一光学辨识面131b、第四光学辨识面134b、第八光学辨识面138b与第七光学辨识面137b靠近光轴101。每一个光学辨识单元130b中,第一光学辨识面131b、第二光学辨识面132b、第三光学辨识面133b、第四光学辨识面134b、第五光学辨识面135b、第六光学辨识面136b、第七光学辨识面137b与第八光学辨识面138b 可被视为八个三角形组成一个菱形(或梯形)外观。光学辨识单元130b沿圆周方向dcf与沿远离光轴101的方向相邻地排列,使得光学辨识结构13b呈网格状的外观。从图5中可看出,光学辨识结构13b于内环缘与外环缘处还包含面积仅有光学辨识单元130b一半的1/2光学辨识单元(未另标号),使得光学辨识结构13b 可如图5所示,形成一圆环形。
[0178]
如图5所示,其中一个第一光学辨识面131b在垂直于光轴101的参考面上的投影面积为a,其满足下列条件:a=8.8
×
10e
‑
3[平方毫米]。此外,其中一个1/2 光学辨识单元中的1/2第一光学辨识面(未另标号)在垂直于光轴101的参考面上的投影面积为3.8
×
10e
‑
3平方毫米。
[0179]
如图5所示,第一光学辨识面131b中在圆周方向dcf上的其中相邻两者各自的图形中心沿圆周方向dcf的间隔距离为d,其满足下列条件:d=0.526[毫米]。此处所指的「第一光学辨识面131b中在圆周方向dcf上的其中相邻两者」,是为与光轴101实质上等距离的相邻两个第一光学辨识面131b。
[0180]
其中一个第一光学辨识面131b在垂直于光轴101的参考面上的投影面积为a,第一光学辨识面131b中在圆周方向dcf上的其中相邻两者各自的图形中心沿圆周方向dcf的间隔距离为d,其满足下列条件:
[0181]
第一光学辨识面131b、第二光学辨识面132b、第三光学辨识面133b与第四光学辨识面134b具有不同方向的表面微结构,因此,第一光学辨识面131b、第二光学辨识面132b、第三光学辨识面133b与第四光学辨识面134b于一方向上具有相异的光泽度。第一光学辨识面131b与第七光学辨识面137b于一方向上具有相同的光泽度,第二光学辨识面132b与第六光学辨识面136b于一方向上具有相同的光泽度,第三光学辨识面133b与第五光学辨识面135b于一方向上具有相同的光泽度,且第四光学辨识面134b与第八光学辨识面138b于一方向上具有相同的光泽度。
[0182]
一观察方向与光学辨识结构13b的夹角为θ,其满足下列条件:50[度]≤θ≤90 [度]。每一光学辨识单元130b中的第一光学辨识面131b与第二光学辨识面132b 于观察方向上的光泽度差值为δg,其满足下列条件:15[光泽单位]≤δg≤50[光泽单位]。
[0183]
每一光学辨识单元130b中的第四光学辨识面134b和第八光学辨识面138b与其他光学辨识面(第一光学辨识面131b至第三光学辨识面133b和第五光学辨识面135b至第七光
学辨识面137b)于光轴101方向上的高度差值为δh,其满足下列条件:δh=0.005[毫米]。
[0184]
成像镜头1还包含一可固化液体14b。可固化液体14b设置于光学辨识结构 13b,且可固化液体14b实体接触于第一光学辨识面131b、第二光学辨识面132b、第三光学辨识面133b、第五光学辨识面135b、第六光学辨识面136b与第七光学辨识面137b。即使是可固化液体14b在点胶过程中接触到了第四光学辨识面134b 或第八光学辨识面138b,可固化液体14b也会因为前述的高度差值δh,而流向其他光学辨识面(第一光学辨识面131b至第三光学辨识面133b和第五光学辨识面 135b至第七光学辨识面137b)。可固化液体14b在固化后将第一光学元件111与第二光学元件112在垂直于光学辨识结构13b的方向上彼此接合。
[0185]
每一个光学辨识单元130c包含一第一光学辨识面131c以及一第二光学辨识面 132c。第一光学辨识面131c与第二光学辨识面132c于环绕光轴101的圆周方向 dcf上相邻地排列。光学辨识单元130c沿圆周方向dcf相邻地排列。
[0186]
每一个第一光学辨识面131c在垂直于光轴101的参考面上的投影面积为a,其满足下列条件:a=9.9
×
10e
‑
3[平方毫米]。
[0187]
第一光学辨识面131c中在圆周方向dcf上的相邻两者各自的图形中心沿圆周方向dcf的间隔距离为d,其满足下列条件:d=0.361[毫米]。
[0188]
每一个第一光学辨识面131c在垂直于光轴101的参考面上的投影面积为a,第一光学辨识面131c中在圆周方向dcf上的相邻两者各自的图形中心沿圆周方向 dcf的间隔距离为d,其满足下列条件:
[0189]
第一光学辨识面131c与第二光学辨识面132c于一方向上具有相异的光泽度。
[0190]
一观察方向与光学辨识结构13c的夹角为θ,其满足下列条件:50[度]≤θ≤90 [度]。每一光学辨识单元130c中的第一光学辨识面131c与第二光学辨识面132c 于观察方向上的光泽度差值为δg,其满足下列条件:15[光泽单位]≤δg≤30[光泽单位]。具体来说,第一光学辨识面131c于一观察方向上的光泽度介于20至30 光泽单位之间。第二光学辨识面132c于一观察方向上的光泽度小于5光泽单位之间。
[0191]
第一光学辨识面131c于一方向上的算数平均粗糙度ra小于0.1微米,且第二光学辨识面132c于同一方向上的算数平均粗糙度ra介于0.3至0.5微米之间。每一光学辨识单元130c中的第一光学辨识面131c与第二光学辨识面132c于同一方向上的粗糙度差值为δr,其满足下列条件:0.2[微米]≤δr≤0.5[微米]。
[0192]
成像镜头1还包含一可固化液体14c。可固化液体14c设置于凹槽gv内的光学辨识结构13c,且可固化液体14c实体接触于第一光学辨识面131c与第二光学辨识面132c。可固化液体14c在固化后将镜筒12与第三光学元件113彼此接合。
[0193]
每一个光学辨识单元130d包含一第一光学辨识面131d以及一第二光学辨识面132d。第一光学辨识面131d与第二光学辨识面132d于环绕光轴101的圆周方向dcf上相邻地排列。光学辨识单元130d沿圆周方向dcf相邻地排列。
[0194]
每一个第一光学辨识面131d在垂直于光轴101的参考面上的投影面积为a,其满足下列条件:a=8.5
×
10e
‑
3[平方毫米]。
[0195]
第一光学辨识面131d中在圆周方向dcf上的相邻两者各自的图形中心沿圆周方向dcf的间隔距离为d,其满足下列条件:d=0.2136[毫米]。
[0196]
每一个第一光学辨识面131d在垂直于光轴101的参考面上的投影面积为a,第一光
学辨识面131d中在圆周方向dcf上的相邻两者各自的图形中心沿圆周方向dcf的间隔距离为d,其满足下列条件:
[0197]
第一光学辨识面131d与第二光学辨识面132d于一方向上具有相异的光泽度。
[0198]
一观察方向与光学辨识结构13d的夹角为θ,其满足下列条件:50[度]≤θ≤90 [度]。每一光学辨识单元130d中的第一光学辨识面131d与第二光学辨识面132d 于观察方向上的光泽度差值为δg,其满足下列条件:15[光泽单位]≤δg≤50[光泽单位]。
[0199]
每一光学辨识单元130d中的第一光学辨识面131d与第二光学辨识面132d的相交角度为φ,其满足下列条件:φ=45[度]。
[0200]
成像镜头1还包含一对应光学辨识结构19。对应光学辨识结构19设置于第四光学元件114。对应光学辨识结构19包含多个对应光学辨识单元190。对应光学辨识结构19的对应光学辨识单元190与光学辨识结构13d的光学辨识单元130d 对应设置。具体来说,每一个对应光学辨识单元190包含一第一对应光学辨识面 191以及一第二对应光学辨识面192。第一对应光学辨识面191与第二对应光学辨识面192的相交角度为45度。第一对应光学辨识面191在垂直于光轴101的方向上与第一光学辨识面131d设置于凹槽gv的相对两侧,且第二对应光学辨识面192 在垂直于光轴101的方向上与第二光学辨识面132d设置于凹槽gv的相对两侧。如图8所示,对应光学辨识结构19的对应光学辨识单元190与光学辨识结构13d 的光学辨识单元130d彼此为斜面对平面的方式对应设置。
[0201]
每一个第一对应光学辨识面191在垂直于光轴101的参考面上的投影面积为 aap,其满足下列条件:aap=5.2
×
10e
‑
3[平方毫米]。
[0202]
第一对应光学辨识面191中在圆周方向dcf上的相邻两者各自的图形中心沿圆周方向dcf的间隔距离为dap,其满足下列条件:dap=0.2077[毫米]。
[0203]
每一个第一对应光学辨识面191在垂直于光轴101的参考面上的投影面积为 aap,第一对应光学辨识面191中在圆周方向dcf上的相邻两者各自的图形中心沿圆周方向dcf的间隔距离为dap,其满足下列条件:
[0204]
第一对应光学辨识面191与第二对应光学辨识面192的光泽度皆分别相同于第二光学辨识面132d与第一光学辨识面131d的光泽度,在此不再赘述。
[0205]
成像镜头1还包含一可固化液体14d。可固化液体14d设置于凹槽gv内的光学辨识结构13d与对应光学辨识结构19,且可固化液体14d实体接触于部分的第一光学辨识面131d、第二光学辨识面132d、部分的第一对应光学辨识面191与第二对应光学辨识面192。具体来说,当凹槽gv填充可固化液体14d时,垂直于光轴101的第二光学辨识面132d与第二对应光学辨识面192被可固化液体14d覆盖,而与光轴101呈45度夹角的第一光学辨识面131d与第一对应光学辨识面191仅有部分被可固化液体14d完全覆盖。此状态可由光学辨识系统探测到,而表示当下状态的可固化液体14d填充量适中。借此,可避免溢胶或点胶不完全的情况。可固化液体14d在固化后将镜筒12与第四光学元件114彼此接合。
[0206]
<第二实施例>
[0207]
请参照图10至图16,其中图10绘示依照本实用新型第二实施例的成像镜头的立体示意图,图11绘示图10的成像镜头的正视示意图,图12绘示图10的成像镜头的侧视示意图,图13绘示图10的成像镜头的后视示意图,图14绘示图11 的成像镜头的ss区域中光学辨识
结构经设置可固化液体的局部放大示意图,图15 绘示图10的成像镜头的镜筒与其中一个光学元件于像侧的分解示意图,且图16 绘示图13的成像镜头的tt区域中光学辨识结构经设置可固化液体的局部放大示意图。
[0208]
在本实施例中,成像镜头2具有一光轴201以及一成像面202。成像镜头2包含多个光学元件21、一镜筒22以及一第二镜筒lb2。光学元件21沿光轴201排列,且包含一光轴转折元件ofe。镜筒22环绕光轴201,且多个光学元件21收纳于镜筒22。第二镜筒lb2设置于镜筒22与成像面202之间,且光轴转折元件ofe 收纳于第二镜筒lb2。如图10所示,光轴转折元件ofe例如为棱镜(prism)或反射镜(mirror),由成像镜头2像侧延伸的光轴201经过光轴转折元件ofe后会被转向90度,借以获得较高弹性的空间配置。此外,成像镜头2于像侧搭配一电子感光元件is以及一电路板cb。电子感光元件is设置于成像面202上,并电性连接电路板cb,以接受成像面202上的成像光信息,并将成像光信息传递给电路板 cb。仅基于绘示简洁的目的,本实施例中仅有图10是绘示出通过转折的光轴201 配置,本实施例其余附图仍绘示一直线的光轴201。
[0209]
具体来说,光学元件21包含一物侧光学元件216、一像侧光学元件217以及位于像侧光学元件217像侧的光轴转折元件ofe。光学元件21还包含位于物侧光学元件216与像侧光学元件217之间的多个其余光学元件(未另标号)。也就是说,光学元件21沿光路方向从物侧到像侧依序包含物侧光学元件216、多个其余光学元件、像侧光学元件217以及光轴转折元件ofe。详细来说,物侧光学元件216 为一片透镜,且像侧光学元件217为一固定件。像侧光学元件217用于从像侧固定物侧光学元件216与其余光学元件。
[0210]
物侧光学元件216包含一光学部2161以及一承靠部2162。光学部2161由光轴201所通过,且为透光材质。承靠部2162环绕光学部2161,且为不透光材质。光学部2161与承靠部2162通过两次注塑成型为一体成型的光学元件。承靠部2162 于一第一方向d1与一第二方向d2上与镜筒22实体接触。详细来说,第一方向 d1由垂直于光轴201的一第一轴ax1与光轴201的交点沿第一轴ax1的其中一个远离光轴201的方向所定义,第二方向d2由垂直于光轴201的一第二轴ax2 与光轴201的交点沿第二轴ax2的其中一个远离光轴201的方向所定义,且第一轴ax1垂直于第二轴ax2。承靠部2162于第二方向d2上具有两个切面2163,使得物侧光学元件216呈现非圆形的外观,故物侧光学元件216也可被称为非圆形元件。
[0211]
像侧光学元件217包含一光学部2171以及一承靠部2172。光学部2171朝向光轴201。承靠部2172环绕光学部2171,并朝向镜筒22。承靠部2172于第一方向d1上与镜筒22实体接触。承靠部2172于第二方向d2上具有两个切面2173,使得像侧光学元件217呈现非圆形的外观,故像侧光学元件217也可被称为非圆形元件。
[0212]
成像镜头2还包含两个光学辨识结构23o以及两个光学辨识结构23i。光学辨识结构23o于第一轴ax1的相对两方向上设置于物侧光学元件216的承靠部2162 的物侧并位于镜筒22与物侧光学元件216之间所形成的凹槽gv,光学辨识结构 23o垂直于光轴201,且光学辨识结构23o朝向物侧。光学辨识结构23i于第一轴 ax1的相对两方向上设置于像侧光学元件217的承靠部2172的像侧并位于镜筒22与像侧光学元件217之间所形成的凹槽gv,光学辨识结构23i垂直于光轴201,且光学辨识结构23i朝向像侧。光学辨识结构23o、23i皆沿环绕光轴201的圆周方向dcf朝向第二轴ax2延伸而呈现弧形的外观。光学辨识结构23o、23i皆从第一轴ax1沿圆周方向dcf往第二轴ax2渐缩。
[度]。每一光学辨识单元230i中的第一光学辨识面231i与第二光学辨识面232i于观察方向上的光泽度差值为δg,其满足下列条件:15[光泽单位]≤δg≤50[光泽单位]。
[0228]
成像镜头2还包含两个可固化液体24i。可固化液体24i设置于凹槽gv内的光学辨识结构23i,且可固化液体24i实体接触于第一光学辨识面231i与第二光学辨识面232i。可固化液体24i在固化后将镜筒22与像侧光学元件217彼此接合。
[0229]
<第三实施例>
[0230]
请参照图17至图21,其中图17绘示依照本实用新型第三实施例的成像镜头的正视示意图,图18绘示图17的成像镜头的侧视示意图,图19绘示图17的成像镜头的后视示意图,图20绘示图17的成像镜头的uu区域的局部放大示意图,且图21绘示图20的成像镜头的光学辨识结构经设置可固化液体的示意图。
[0231]
在本实施例中,成像镜头3具有一光轴301以及一成像面302。成像镜头3包含多个光学元件31以及一镜筒32。光学元件31沿光轴301排列。镜筒32环绕光轴301,且多个光学元件31收纳于镜筒32。其中,如同第二实施例,光学元件31 于成像镜头3的像侧包含一光轴转折元件ofe,光轴转折元件ofe的描述请见第二实施例的相关叙述内容,在此不再赘述。并且,仅基于绘示简洁的目的,本实施例中的附图仍绘示一直线的光轴301。
[0232]
具体来说,光学元件31包含一物侧光学元件316、一像侧光学元件317以及位于像侧光学元件317像侧的一光轴转折元件ofe。光学元件31还包含位于物侧光学元件316与像侧光学元件317之间的多个其余光学元件(未另标号)。也就是说,光学元件31沿光路方向从物侧到像侧依序包含物侧光学元件316、多个其余光学元件、像侧光学元件317以及光轴转折元件ofe。详细来说,物侧光学元件 316为一片透镜,且像侧光学元件317为一固定件。像侧光学元件317用于从像侧固定物侧光学元件316与其余光学元件。
[0233]
物侧光学元件316包含一光学部3161以及一承靠部3162。光学部3161由光轴301所通过。承靠部3162环绕光学部3161。承靠部3162于一第一方向d1与一第二方向d2上与镜筒32实体接触。详细来说,第一方向d1由垂直于光轴301 的一第一轴ax1与光轴301的交点沿第一轴ax1的其中一个远离光轴301的方向所定义,第二方向d2由垂直于光轴301的一第二轴ax2与光轴301的交点沿第二轴ax2的其中一个远离光轴301的方向所定义,且第一轴ax1垂直于第二轴 ax2。承靠部3162于第二方向d2上具有两个切面3163,使得物侧光学元件316 呈现非圆形的外观,故物侧光学元件316也可被称为非圆形元件。
[0234]
像侧光学元件317包含一光学部3171以及一承靠部3172。光学部3171朝向光轴301。承靠部3172环绕光学部3171,并朝向镜筒32。承靠部3172于第一方向d1上与镜筒32实体接触。承靠部3172于第二方向d2上具有两个切面3173,使得像侧光学元件317呈现非圆形的外观,故像侧光学元件317也可被称为非圆形元件。
[0235]
成像镜头3还包含两个光学辨识结构33o以及一光学辨识结构33i。光学辨识结构33o于第一轴ax1的相对两方向上设置于物侧光学元件316的承靠部3162 的物侧并位于镜筒32与物侧光学元件316之间所形成的凹槽gv,光学辨识结构 33o垂直于光轴301,且光学辨识结构33o朝向物侧。光学辨识结构33i环绕地设置于像侧光学元件317的承靠部3172的像侧并部分地位于镜筒32与像侧光学元件317之间所形成的凹槽gv,光学辨识结构33i垂直于光轴301,且光学辨识结构33i朝向像侧。光学辨识结构33o沿环绕光轴301的圆周方向dcf朝向第二轴 ax2延伸而呈现弧形的外观。光学辨识结构33o、33i皆从第一轴ax1沿圆周方向
[度]。每一光学辨识单元330i中的第一光学辨识面331i与第二光学辨识面332i于观察方向上的光泽度差值为δg,其满足下列条件:15[光泽单位]≤δg≤50[光泽单位]。
[0251]
成像镜头3还包含一可固化液体34i。可固化液体34i设置于凹槽gv内的光学辨识结构33i,且可固化液体34i实体接触于第一光学辨识面331i与第二光学辨识面332i。可固化液体34i在固化后将镜筒32与像侧光学元件317彼此接合。
[0252]
本实用新型不以上述实施例的光学辨识结构为限,可视情形将上述任一种光学辨识结构更换成另一种光学辨识结构,或者也可视情形更换成下述其中一种平面式或立体式光学辨识结构。
[0253]
请参照图31,是绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。如图31所示,一立体式光学辨识结构tois1包含多个光学辨识单元 tois1_0。每一个光学辨识单元tois1_0包含一第一光学辨识面tois1_1以及一第二光学辨识面tois1_2。第一光学辨识面tois1_1与第二光学辨识面tois1_2 相邻地排列。
[0254]
第一光学辨识面tois1_1与第二光学辨识面tois1_2于一方向上可具有相异的光泽度与相同的粗糙度。
[0255]
每一个第一光学辨识面tois1_1在垂直于光轴的参考面上的投影面积为a,其满足下列条件:a=6.7
×
10e
‑
3[平方毫米]。
[0256]
第一光学辨识面tois1_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:d=0.1333[毫米]。
[0257]
每一个第一光学辨识面tois1_1在垂直于光轴的参考面上的投影面积为a,第一光学辨识面tois1_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:
[0258]
每一光学辨识单元tois1_0中的第一光学辨识面tois1_1与第二光学辨识面 tois1_2的相交角度为φ,其满足下列条件:φ=57[度]。
[0259]
请参照图32,是绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。如图32所示,一立体式光学辨识结构tois2包含多个光学辨识单元tois2_0。每一个光学辨识单元tois2_0包含一第一光学辨识面tois2_1、一第二光学辨识面tois2_2、一第三光学辨识面tois2_3以及一第四光学辨识面tois2_4。第一光学辨识面tois2_1、第二光学辨识面tois2_2、第三光学辨识面tois2_3 与第四光学辨识面tois2_4依序地排列。
[0260]
第一光学辨识面tois2_1与第二光学辨识面tois2_2于一方向上具有相异的光泽度,第一光学辨识面tois2_1与第三光学辨识面tois2_3于一方向上具有相同的光泽度,且第二光学辨识面tois2_2与第四光学辨识面tois2_4于一方向上具有相同的光泽度。
[0261]
每一个第一光学辨识面tois2_1在垂直于光轴的参考面上的投影面积为a,其满足下列条件:a=6.7
×
10e
‑
3[平方毫米]。
[0262]
第一光学辨识面tois2_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:d=0.2667[毫米]。
[0263]
每一个第一光学辨识面tois2_1在垂直于光轴的参考面上的投影面积为a,第一光学辨识面tois2_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:
[0264]
每一光学辨识单元tois2_0中的第二光学辨识面tois2_2与第四光学辨识面 tois2_4于光轴方向上的高度差值为δh,其满足下列条件:δh=0.072[毫米]。
[0265]
每一光学辨识单元tois2_0中的第一光学辨识面tois2_1与第二光学辨识面 tois2_2的相交角度为φ,其满足下列条件:φ=47[度]。
[0266]
请参照图33,是绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。如图33所示,一立体式光学辨识结构tois3包含多个光学辨识单元 tois3_0。每一个光学辨识单元tois3_0包含一第一光学辨识面tois3_1与一第二光学辨识面tois3_2。第一光学辨识面tois3_1与第二光学辨识面tois3_2相邻地排列。
[0267]
第一光学辨识面tois3_1与第二光学辨识面tois3_2于一方向上具有相异的光泽度。
[0268]
每一个第一光学辨识面tois3_1在垂直于光轴的参考面上的投影面积为a,其满足下列条件:a=1.0
×
10e
‑
2[平方毫米]。
[0269]
第一光学辨识面tois3_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:d=0.20[毫米]。
[0270]
每一个第一光学辨识面tois3_1在垂直于光轴的参考面上的投影面积为a,第一光学辨识面tois3_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:
[0271]
每一光学辨识单元tois3_0中的第一光学辨识面tois3_1与第二光学辨识面 tois3_2的相交角度为φ,其满足下列条件:φ=20[度]。
[0272]
如图33所示,另有一对应光学辨识结构cois以斜面对应平面的方式与光学辨识结构tois3对应设置。对应设置的详细说明可参照前述有关对应光学辨识结构19的叙述,在此不再赘述。另外,对应光学辨识结构cois的相关参数a、d、φ皆相同于光学辨识结构tois3的对应参数,在此不再赘述。此外,光学辨识结构tois3与对应光学辨识结构cois之间形成一凹槽gv。
[0273]
请参照图34,是绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图。如图34所示,一立体式光学辨识结构tois4包含多个光学辨识单元 tois4_0。每一个光学辨识单元tois4_0包含一第一光学辨识面tois4_1与一凹陷结构tois4_9。第一光学辨识面tois4_1与凹陷结构tois4_9相邻地排列。
[0274]
第一光学辨识面tois4_1与凹陷结构tois4_9于一方向上具有相异的光泽度。
[0275]
每一个第一光学辨识面tois4_1在垂直于光轴的参考面上的投影面积为a,其满足下列条件:a=1.0
×
10e
‑
2[平方毫米]。
[0276]
第一光学辨识面tois4_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:d=0.2[毫米]。
[0277]
每一个第一光学辨识面tois4_1在垂直于光轴的参考面上的投影面积为a,第一光学辨识面tois4_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:
[0278]
凹陷结构tois4_9在垂直于光轴的参考面上的投影定义出一等效光学辨识面 eois。等效光学辨识面eois的面积与每一个光学辨识单元tois4_0于所述参考面上的投影
面积占比为ar,其满足下列条件:ar=0.5。
[0279]
请参照图35,是绘示图34的光学辨识结构经设置可固化液体的示意图。如图 35所示,可固化液体cl收纳于凹陷结构tois4_9,而在上表面处呈现与第一光学辨识面tois4_1相同大小的形状。然而,本实用新型不以此为限。
[0280]
请参照图36至37,其中图36绘示依照本实用新型的再一实施例中立体式光学辨识结构的立体示意图,且图37绘示图36的光学辨识结构经设置可固化液体的示意图。
[0281]
图36至图37的立体式光学辨识结构(未另标号)大致上与图34至图35的立体式光学辨识结构tois4类似,惟图36至图37的立体式光学辨识结构的等效光学辨识面eois的面积与光学辨识单元(未另标号)于参考面上的投影面积占比 ar为0.75。
[0282]
请参照图38,绘示依照本实用新型的再一实施例中平面式光学辨识结构的示意图。如图38所示,一平面式光学辨识结构tois6包含多个光学辨识单元tois6_0。每一个光学辨识单元tois6_0包含一第一光学辨识面tois6_1、一第二光学辨识面tois6_2、一第三光学辨识面tois6_3以及一第四光学辨识面tois6_4。第一光学辨识面tois6_1与第二光学辨识面tois6_2于环绕光轴的圆周方向dcf上相邻地排列。第三光学辨识面tois6_3与第四光学辨识面tois6_4于圆周方向dcf 上相邻地排列,且较第一光学辨识面tois6_1与第二光学辨识面tois6_2靠近光轴。也就是说,每一个光学辨识单元tois6_0中,第一光学辨识面tois6_1、第二光学辨识面tois6_2、第三光学辨识面tois6_3与第四光学辨识面tois6_4可被视为2
×
2的矩阵排列。光学辨识单元tois6_0沿圆周方向dcf与沿远离光轴的方向daf相邻地排列,使得光学辨识结构tois6呈网格状的外观。
[0283]
第一光学辨识面tois6_1与第二光学辨识面tois6_2于一方向上具有相异的光泽度,第一光学辨识面tois6_1与第三光学辨识面tois6_3于一方向上具有相同的光泽度,且第二光学辨识面tois6_2与第四光学辨识面tois6_4于一方向上具有相同的光泽度。
[0284]
每一个第一光学辨识面tois6_1在垂直于光轴的参考面上的投影面积为a,其满足下列条件:a=1.21
×
10e
‑
2[平方毫米]。
[0285]
第一光学辨识面tois6_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:d=0.22[毫米]。
[0286]
每一个第一光学辨识面tois6_1在垂直于光轴的参考面上的投影面积为a,第一光学辨识面tois6_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:
[0287]
请参照图39,绘示依照本实用新型的再一实施例中平面式光学辨识结构的示意图。如图39所示,一平面式光学辨识结构tois7包含多个光学辨识单元tois7_0。每一个光学辨识单元tois7_0包含一第一光学辨识面tois7_1、一第二光学辨识面tois7_2、一第三光学辨识面tois7_3、一第四光学辨识面tois7_4、一第五光学辨识面tois7_5、一第六光学辨识面tois7_6、一第七光学辨识面tois7_7以及一第八光学辨识面tois7_8。第一光学辨识面tois7_1、第二光学辨识面 tois7_2、第七光学辨识面tois7_7与第八光学辨识面tois7_8于环绕光轴的圆周方向dcf上相邻地排列。第四光学辨识面tois7_4、第三光学辨识面tois7_3、第六光学辨识面tois7_6与第五光学辨识面tois7_5于圆周方向dcf上相邻地排列,且较第一光学辨识面tois7_1、第二光学辨识面tois7_2、第七光学辨识面 tois7_7与第八光学辨识面tois7_8靠近光轴。从图39可看出,第一光学辨识面 tois7_1、第二光学辨识面
tois7_2、第三光学辨识面tois7_3、第四光学辨识面 tois7_4、第五光学辨识面tois7_5、第六光学辨识面tois7_6、第七光学辨识面 tois7_7与第八光学辨识面tois7_8可被视为八个三角形组成一个梯形外观。光学辨识单元tois7_0沿圆周方向dcf与沿远离光轴的方向daf相邻地排列,使得光学辨识结构tois7呈网格状的外观,其中,圆周方向dcf与远离光轴的方向 daf夹角为60度。从图39中可看出,光学辨识结构tois7于侧缘处还包含面积仅有光学辨识单元tois7_0一半的1/2光学辨识单元(未另标号),使得光学辨识结构tois7可如图39所示,形成矩形。
[0288]
第一光学辨识面tois7_1、第二光学辨识面tois7_2、第三光学辨识面 tois7_3与第四光学辨识面tois7_4于一方向上具有相异的光泽度,第一光学辨识面tois7_1与第五光学辨识面tois7_5于一方向上具有相同的光泽度,第二光学辨识面tois7_2与第六光学辨识面tois7_6于一方向上具有相同的光泽度,第三光学辨识面tois7_3与第七光学辨识面tois7_7于一方向上具有相同的光泽度,且第四光学辨识面tois7_4与第八光学辨识面tois7_8于一方向上具有相同的光泽度。
[0289]
每一个第一光学辨识面tois7_1在垂直于光轴的参考面上的投影面积为a,其满足下列条件:a=5.2
×
10e
‑
3[平方毫米]。此外,其中一个1/2光学辨识单元中的1/2第一光学辨识面(未另标号)在垂直于光轴的参考面上的投影面积为 2.6
×
10e
‑
3平方毫米。
[0290]
第一光学辨识面tois7_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:d=0.22[毫米]。
[0291]
每一个第一光学辨识面tois7_1在垂直于光轴的参考面上的投影面积为a,第一光学辨识面tois7_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:
[0292]
请参照图40,绘示依照本实用新型的再一实施例中平面式光学辨识结构的示意图。如图40所示,一平面式光学辨识结构tois8包含多个光学辨识单元tois8_0。每一个光学辨识单元tois8_0包含一第一光学辨识面tois8_1、一第二光学辨识面tois8_2、一第三光学辨识面tois8_3以及一第四光学辨识面tois8_4。第一光学辨识面tois8_1与第二光学辨识面tois8_2于环绕光轴的圆周方向dcf上相邻地排列。第三光学辨识面tois8_3与第四光学辨识面tois8_4于圆周方向dcf 上相邻地排列,且较第一光学辨识面tois8_1与第二光学辨识面tois8_2靠近光轴。也就是说,每一个光学辨识单元tois8_0中,第一光学辨识面tois8_1、第二光学辨识面tois8_2、第三光学辨识面tois8_3与第四光学辨识面tois8_4可被视为2
×
2的矩阵排列。光学辨识单元tois8_0沿圆周方向dcf相邻地排列,使得光学辨识结构tois8呈网格状的外观。
[0293]
第一光学辨识面tois8_1与第二光学辨识面tois8_2于一方向上具有相异的光泽度,第一光学辨识面tois8_1与第三光学辨识面tois8_3于一方向上具有相同的光泽度,且第二光学辨识面tois8_2与第四光学辨识面tois8_4于一方向上具有相同的光泽度。
[0294]
每一个第一光学辨识面tois8_1在垂直于光轴的参考面上的投影面积为a,其满足下列条件:a=1.34
×
10e
‑
2[平方毫米]。
[0295]
第一光学辨识面tois8_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:d=0.488[毫米]。
[0296]
每一个第一光学辨识面tois8_1在垂直于光轴的参考面上的投影面积为a,第一光
学辨识面tois8_1中的相邻两者各自的图形中心的间隔距离为d,其满足下列条件:
[0297]
<第四实施例>
[0298]
请参照图22,是绘示依照本实用新型第四实施例的一种取像装置的立体示意图。在本实施例中,取像装置4为一相机模块。取像装置4包含上述第一实施例的成像镜头1、驱动装置42、电子感光元件43以及影像稳定模块44。取像装置4 也可改为配置上述其他实施例的成像镜头,本实用新型并不以此为限。取像装置4 利用成像镜头1聚光产生影像,并配合驱动装置42进行影像对焦,最后成像于电子感光元件43并且能作为影像资料输出。
[0299]
驱动装置42可具有自动对焦(auto
‑
focus)功能,其驱动方式可使用如音圈马达 (voice coil motor,vcm)、微机电系统(micro electro
‑
mechanical systems,mems)、压电系统(piezoelectric)、以及记忆金属(shape memory alloy)等驱动系统。驱动装置42可让成像镜头1取得较佳的成像位置,可提供被摄物于不同物距的状态下,皆能拍摄清晰影像。此外,取像装置4搭载一感光度佳及低杂讯的电子感光元件 43(如cmos、ccd)设置于成像镜头1的成像面102,可真实呈现成像镜头1的良好成像品质。
[0300]
影像稳定模块44例如为加速计、陀螺仪或霍尔元件(hall effect sensor)。驱动装置42可搭配影像稳定模块44而共同作为一光学防手震装置(optical imagestabilization,ois),通过调整成像镜头1不同轴向的变化以补偿拍摄瞬间因晃动而产生的模糊影像,或利用影像软件中的影像补偿技术,来提供电子防手震功能 (electronic image stabilization,eis),进一步提升动态以及低照度场景拍摄的成像品质。
[0301]
<第五实施例>
[0302]
请参照图23至图25,其中图23绘示依照本实用新型第五实施例的一种电子装置的立体示意图,图24绘示图23的电子装置的另一侧的立体示意图,图25绘示图23的电子装置的系统方块图。
[0303]
在本实施例中,电子装置5为一移动装置,其中移动装置可以是电脑、智能手机、智能穿戴装置、空拍机或车用影像纪录与显示仪器等等,本实用新型不以此为限。电子装置5包含取像装置4、取像装置5a、取像装置5b、取像装置5c、取像装置5d、取像装置5e、取像装置5f、取像装置5g、闪光灯模块52、对焦辅助模块53、影像信号处理器54(image signal processor)、使用者介面55以及影像软件处理器56。
[0304]
取像装置4、取像装置5a、取像装置5b、取像装置5c及取像装置5d是皆配置于电子装置5的同一侧。取像装置5e、取像装置5f、取像装置5g及使用者介面 55是皆配置于电子装置5的另一侧,并且使用者介面55为显示装置,以使取像装置5e及取像装置5f可作为前置镜头以提供自拍功能,但本实用新型并不以此为限。
[0305]
取像装置5a、取像装置5b、取像装置5c、取像装置5d、取像装置5e、取像装置5f及取像装置5g皆可包含本实用新型的成像镜头且皆可具有与取像装置4 类似的结构配置。详细来说,取像装置5a、取像装置5b、取像装置5c、取像装置 5d、取像装置5e、取像装置5f及取像装置5g各可包含一成像镜头、一驱动装置、一电子感光元件以及一影像稳定模块。其中,取像装置5a、取像装置5b、取像装置5c、取像装置5d、取像装置5e、取像装置5f及取像装置5g的成像镜头各可包含例如为本实用新型的多个光学元件的一光学镜组、例如为本实用新型的镜筒的用于承载光学镜组的一镜筒以及一支持装置。
[0306]
取像装置4为一广角取像装置,取像装置5a为一超广角取像装置,取像装置 5b为一微距取像装置,取像装置5c为一望远取像装置,取像装置5d为一超望远取像装置,取像装置5e为一超广角取像装置,取像装置5f为一广角取像装置,且取像装置5g为一飞时测距(time of flight,tof)取像装置。本实施例的取像装置4、取像装置5a、取像装置5b、取像装置5c与取像装置5d具有相异的视角,使电子装置5可提供不同的放大倍率,以达到光学变焦的拍摄效果。举例来说,超广角取像装置5a或5e具有105度至125度的最大视角,其能达成介于11mm至14mm 之间等效焦距的影像,而超广角取像装置5a或5e能被视为可提供0.5倍的放大倍率。在此情况下所拍摄到的影像可参照图26,是绘示有电子装置5以介于11mm 至14mm之间的等效焦距所撷取到的影像示意图,其中所撷取到的影像包含整体教堂、周边建筑与广场上的人物。图26的影像具有较大的视角与景深,但常伴随有较大的畸变。广角取像装置4或5f具有50度至100度的最大视角,其能达成介于20mm至40mm之间等效焦距的影像,而广角取像装置4或5f能被视为可提供 1倍的放大倍率。在此情况下所拍摄到的影像可参照图27,是绘示有电子装置5 以介于20mm至40mm之间的等效焦距所撷取到的影像示意图,其中所撷取到的影像包含整体教堂与教堂前的人物。望远取像装置5c具有15度至30度的最大视角,其能达成介于100mm至150mm之间等效焦距的影像,而望远取像装置5c能被视为可提供5倍的放大倍率。在此情况下所拍摄到的影像可参照图28,是绘示有电子装置5以介于100mm至150mm之间的等效焦距所撷取到的影像示意图,其中所撷取到的影像包含教堂前方飞翔的鸟群。图28的影像具有较小的视角与景深,使得望远取像装置5c可用于拍摄移动目标,致动器驱动成像镜头对目标快速且连续的自动对焦,使目标物不会因为远离对焦位置而模糊不清。超望远取像装置5d具有4度至8度的最大视角,其能达成介于400mm至600mm之间等效焦距的影像,而超望远取像装置5d能被视为可提供20倍的放大倍率。在此情况下所拍摄到的影像可参照图29,是绘示有电子装置5以介于400mm至600mm之间的等效焦距所撷取到的影像示意图,其中所撷取到的影像包含教堂尖塔上方的天使像与十字架。图29的影像具有更小的视角与景深,使得超望远取像装置5d的成像镜头更容易因抖动而失焦,因此致动器在提供驱动力使超望远取像装置5d的成像镜头对目标物聚焦时,可同时提供修正抖动的反馈力以达成光学防抖的功效。另外,取像装置5g是可取得影像的深度信息。上述电子装置5以包含多个取像装置4、5a、5b、5c、5d、5e、5f、5g为例,但取像装置的数量与配置并非用以限制本实用新型。
[0307]
当使用者拍摄被摄物obj时,电子装置5利用取像装置4、取像装置5a、取像装置5b、取像装置5c或取像装置5d聚光取像,启动闪光灯模块52进行补光,并使用对焦辅助模块53提供的被摄物obj的物距信息进行快速对焦,再加上影像信号处理器54进行影像最佳化处理,来进一步提升成像镜头1所产生的影像品质。对焦辅助模块53可采用红外线或激光对焦辅助系统来达到快速对焦。
[0308]
此外,电子装置5也可利用取像装置5e、取像装置5f或取像装置5g进行拍摄。当取像装置5e、取像装置5f或取像装置5g进行拍摄时,可有一提示灯5h发光以提醒使用者电子装置5正在拍摄中。使用者介面55可采用触控屏幕或实体拍摄按钮551,配合影像软件处理器56的多样化功能进行影像拍摄以及影像处理。通过影像软件处理器56处理后的影像可显示于使用者介面55。使用者还可通过使用者介面55的影像回放按键552重播先前拍摄的影像,也可通过取像装置切换按键553以选取适合的取像装置来进行拍摄,还可通过集成选单
按键554来对当下的拍摄场景进行适合的拍摄条件调整。
[0309]
进一步来说,电子装置5还包含一电路板57,且电路板57承载多个电子元件 58。取像装置4、5a、5b、5c、5d、5e、5f、5g通过电路板57上的连结器571电性连接电子元件58,其中电子元件58可包含一信号发射模块581,可通过信号发射模块581将影像传递至其他电子装置或是云端储存。其中,信号发射模块581 可以是无线网络技术(wireless fidelity,wifi)模块、蓝牙模块、红外线模块、网络服务模块或上述多种信号发射的集成模块,本实用新型不以此为限。
[0310]
电子元件58也可包含存储器582、随机存储器583以储存影像信号、陀螺仪 584、位置定位器585以利电子装置5的导航或定位。在本实施例中,影像信号处理器54、影像软件处理器56与随机存储器583整合成一个单晶片系统59,但本实用新型不以此配置为限。在部分其他实施例中,电子元件也可以整合于取像装置或也可设置于多个电路板的其中一者。
[0311]
本实用新型的成像镜头1~3不以应用于移动装置为限。成像镜头1~3更可视需求应用于移动对焦的系统,并兼具优良像差修正与良好成像品质的特色。举例来说,成像镜头1~3可多方面应用于三维(3d)影像撷取、数字相机、移动装置、平板计算机、智能电视、网络监控设备、行车记录仪、倒车显影装置、多镜头装置、辨识系统、体感游戏机与穿戴式装置等电子装置中。前揭电子装置仅是示范性地说明本实用新型的实际运用例子,并非限制本实用新型的相机模块的运用范围。
[0312]
虽然本实用新型以前述的诸项实施例揭露如上,然其并非用以限定本实用新型,任何熟习相像技艺者,在不脱离本实用新型的精神和范围内,当可作些许的更动与润饰,因此本实用新型的专利保护范围须视本说明书所附的权利要求保护范围所界定的为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1