产生第一部件与第二部件之间的粘合接合的方法和装置与流程
产生第一部件与第二部件之间的粘合接合的方法和装置
1.本技术要求2019年7月1日提交的德国专利申请de 10 2019 209 610.7的优先权。该德国申请的全部内容通过引用还并入在本技术文本中。
2.发明背景
技术领域
3.本发明涉及用于产生微光刻的第一部件与第二部件之间的粘合接合的方法和装置。本发明特别地可以用于产生在致动器与例如作为用于产生微光刻的部件的反射镜的光学元件之间的粘合接合。本发明还涉及制造包括照明装置和投射镜头的微光刻投射曝光设备的方法,其中在照明装置和/或投射镜头中产生第一部件与第二部件之间的粘合接合。
背景技术:
4.微光刻用于制造诸如集成电路或lcd的微结构部件。在包括照明装置和投射镜头的称为投射曝光设备中进行微光刻过程。在此将通过照明装置照明的掩模(=掩模母版)的图像通过投射镜头投射至基板(例如硅晶片)上,该基板涂有感光层(=光刻胶)且设置在投射镜头的像平面中,以便将掩模结构转印至基板的感光涂层。
5.在对euv范围(即在例如大约13nm或大约7nm的波长处)设计的投射镜头中,由于缺少可用的合适的光透射的折射材料,因而反射镜用作成像过程的光学部件。
6.在为euv范围设计的系统和duv系统(即波长小于250nm,特别是小于200nm)两者中,已知以自适应或可致动的方式配置光学部件,例如反射镜,以便至少部分补偿光学系统中的成像像差,例如通过局部变形补偿。为此,特别地,可以通过粘合接合将一个或多个(例如压电)致动器固定到相应的光学元件,例如固定到其背离光学有效表面的后侧。
7.在这样的粘合接合的情况下,粘合间隙的精确设置——其对于粘合接合的使用寿命原因且为了避免光学系统中不期望的光学像差是期望或必须的——由于光刻应用中的准确度要求高因而构成严苛的挑战。这尤其是归因于以下事实:在通常弯曲的连接表面处的相应粘合间隙的限定设置由于多种因素而变得更加困难,多种因素特别地包括连接表面的制造决定几何偏差、粘合剂的粘度波动以及尤其对粘合剂的流动行为和部件的准确取向的重力影响。附加因素在于,鉴于高准确度要求,必须可靠地防止将机械应力和与其相关联的变形特别是引入到相应的致动器或相关的光学元件中。
技术实现要素:
8.本发明的目的是提供用于产生在微光刻的第一部件与第二部件之间的粘合接合的方法和装置,其能够可靠且精确地设置粘合间隙,同时至少部分地避免上述问题。
9.该目的通过根据独立权利要求1的特征的方法以及根据替代的独立权利要求16的特征的装置来实现。
10.根据本发明的用于产生在微光刻的第一部件与第二部件之间的粘合接合的方法,其中第二部件是光学元件,包括以下步骤:
[0011]-将第一部件和第二部件引入到定位装置中,其可以改变第一部件与第二部件之间的相对位置;
[0012]-校准第一相对位置,在第一相对位置,第一部件与第二部件之间的距离具有限定预定义粘合间隙的第一值;
[0013]-校准第二相对位置,在第二相对位置,第一部件与第二部件之间的距离具有大于第一值的第二值;
[0014]-在第一部件和第二部件彼此之间相距大于第一值的距离时将粘合剂施加到第一部件;以及
[0015]-在第一部件与第二部件之间形成粘合剂时设置第一相对位置;
[0016]
其中,校准第一相对位置和校准第二相对位置两者仍然在将粘合剂施加到第一部件之前实行。
[0017]
尽管在下文中作为示例假设第一部件是致动器且第二部件是例如形式为反射镜的光学元件,这两个部件都用于微光刻,但是本发明不限于此。相反,本发明还能够有利地在用于微光刻的其他应用中实现,这些应用力求实现粘合间隙的尽可能可靠和精确的设置,同时至少部分地避免在背景技术中描述的问题。
[0018]
在对微光刻的要求的上下文中,本发明基于以下构思,特别是当产生粘合接合时,实现第一部件(例如致动器)和第二部件(例如光学部件)之间的粘合间隙的精确和受控设置,这通过仍然在将粘合剂施加到连接表面中的一个之前在定位装置中实行关于与最终期望的粘合间隙距离对应的终止位置及关于尚未与所述终止位置对应的(开始)位置两者对致动器和光学元件之间的相对位置的校准,该定位装置使其可以改变致动器和光学元件相对于彼此的相对位置。仍然在没有施加粘合剂的情况下实行的这些校准步骤中的一个校准步骤典型地在开始时实行或仍然在致动器最初已经移动到光学元件之前实行,而另一个校准步骤(与致动器的终止位置相对于光学元件的校准有关,所述终止位置对应于粘合间隙距离)在初始移动到光学元件之后实行。然后,则可以在致动器再次与光学元件相距较大距离的情况下将粘合剂施加到致动器并且致动器最终从校准的起始位置移动到光学元件,直到与粘合间隙距离相对应的同样校准的终止位置。
[0019]
因为最后提及的步骤是在光学元件没有被致动器接触的情况下且还在有(典型地传感器辅助的)粘合间隙距离设置的控制的情况下实行的,因此以控制的方式实现了精确的粘合间隙设置,而同时避免经由致动器将机械应力引入光学元件。
[0020]
根据一个实施例,校准第二相对位置包括测量临时与第一部件的表面接触的校准元件的位置。
[0021]
根据一个实施例,所述校准元件具有与第二部件的表面对应的几何形状。
[0022]
根据一个实施例,使用至少一个距离传感器、特别是光学距离传感器来实行第一相对位置和/或第二相对位置的校准。
[0023]
根据一个实施例,校准第一相对位置和/或第二相对位置包括在六个自由度中取向第二部件。
[0024]
根据一个实施例,使用存在于定位装置中的至少一个机械止挡件来实行第二部件的所述取向。
[0025]
根据一个实施例,校准第一相对位置和/或第二相对位置包括第一部件的横向取
向。
[0026]
根据一个实施例,第一部件的所述横向取向使用存在于定位装置中的至少一个机械止挡件来实行。
[0027]
根据一个实施例,第一部件包括多个部分表面,其中在施加粘合剂的过程中,考虑到在相应部分表面的边缘区域中预期的弯月面形成,对于相互不同的部分表面改变粘合剂的计量。
[0028]
根据一个实施例,在施加粘合剂的过程中,考虑到第一部件与第二部件之间的角位置来定位粘合剂,预期该角位置在已经产生粘合接合之后所获得的终止位置中。
[0029]
根据一个实施例,第一部件是致动器。
[0030]
根据一个实施例,第二部件是光学元件,特别是反射镜或透镜元件。
[0031]
本发明还涉及用于制造包括照明装置和投射镜头的微光刻投射曝光设备的方法,其中在照明装置和/或投射镜头中的第一部件与第二部件之间的粘合接合是通过实行具有上述特征的方法产生的。
[0032]
在这种情况下,特别地,第一部件可以是致动器,而第二部件特别地可以是光学元件,更特别地是反射镜或透镜元件。
[0033]
本发明还涉及表征用于产生微光刻的第一部件与第二部件之间的粘合接合的装置,其中装置配置为实行具有上述特征的方法。
[0034]
可以从说明书和从属权利要求获得本发明的其他配置。
[0035]
下面基于附图中所示的示例性实施例更详细地解释本发明。
附图说明
[0036]
附图中:
[0037]
图1a-1e示出了用于阐明根据本发明的方法的可能顺序的示意图;
[0038]
图2-3显示了用于更具体地阐明图1b中区域“a”的可能配置的细节示意图;
[0039]
图4示出了用于阐明在一个示例性实施例中根据本发明的方法的顺序的流程图;
[0040]
图5-6示出了用于阐明根据本发明的方法的有利配置的示意图;
[0041]
图7示出了用于阐述针对euv下操作所设计的微光刻投射曝光设备的可能构造的示意图;以及
[0042]
图8示出了用于阐述针对duv范围下操作所设计的微光刻投射曝光设备的可能构造的示意图。
具体实施方式
[0043]
下面参考图1a-1e和图2-3中的示意图以及图4所示的流程图解释根据本发明的方法的实施例。
[0044]
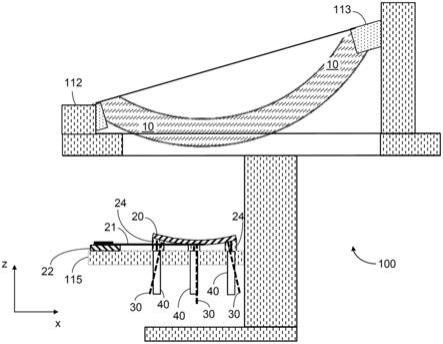
根据图1a,该方法在定位装置100中实行,该定位装置如下文更详细描述的使得部件(一方面是光学部件10,另一方面是致动器20)的取向可以通过粘合接合和调整所述部件相对于彼此的相对位置的方式来彼此连接。这包括根据图1a和根据图4的步骤s410和s420,首先实行一方面在六个自由度中取向光学部件10的过程(例如使用机械止挡件112、113)以及横向取向致动器20的过程,该致动器20由在z方向上可移动的桌115承载并且通过例如微
米螺钉的形式的调整装置40是可调整的。“21”和“22”表示相应(例如压电)致动器20的连接线和接触体。根据图1a,在示例性实施例中,致动器20的横向取向是通过横向机械止挡件24来实行。
[0045]
下一步骤s430包括校准致动器20的(z)位置,其可以用作在稍后相对调整中的起始位置。在此,下面提及的测量技术(例如共聚焦传感器)根据致动器表面被“归零”,并且限定稍后粘合间隙的边界表面的位置。使用任何合适的测量技术,并且在示例性实施例中借助于指向形式为参考反射镜的校准元件50的参考表面50a的共聚焦传感器30来实行与致动器20的z位置的“归零”相对应的该校准。如可以从图2最好地看出,在具体示例性实施例中(但本发明不限于此),共聚焦传感器30的测量部分延伸穿过位于致动器20内的孔23。校准元件50的参考表面50a就其本身而言具有对应于光学元件10的表面的几何体,所述参考表面在该校准期间承载抵靠致动器20的表面20a。通过借助于共聚焦传感器30测量参考表面50a的位置,也间接地确定致动器20的表面20a的位置。
[0046]
在其他实施例中,致动器20的位置的上述校准还可以使用任何其他合适的(例如触觉)测量技术或使用坐标测量机来实行。
[0047]
根据图3,在致动器20的位置的上述校准中使用的校准元件(或参考反射镜)还可以被配置有显著减小的横向尺寸,使得例如在根据图3图示的示例性实施例中,校准元件55精确地投射到致动器20中存在的孔23上方并由共聚焦传感器30使用。因此,通过使用这样的校准元件55,与图2中的配置相反,通常致动器20的表面20a上存在的形状的缺陷或不均匀对校准没有影响。此外,当实行两个单独的校准步骤,其中一个校准步骤使用较大的校准元件50实行而另一个校准步骤使用较小的校准元件55实行时,还可以确定致动器20的表面20a上的所述形状的缺陷。
[0048]
根据图4以及图1c的下一步骤s440然后包括将致动器20移动到光学元件10直到获得期望的粘合间隙(仅作为示例为100μm),该移动借助于桌115在z方向上可移动并且优选地在借助于共聚焦传感器30的控制下。在本发明的实施例中,还可以针对由粘合接合固定到光学元件10的多个致动器20实行上述步骤。在获得期望的粘合间隙距离之后,再次实行该z位置的对应校准,因此根据图4和图1d的后续步骤s450包括再次将致动器20移开光学元件10并且通过合适装置25在致动器20的表面上施加粘合剂26。
[0049]
其他步骤s460包括再次将致动器20移动到光学元件10直到达到根据期望的粘合间隙先前限定的校准位置,其中可以借助于共聚焦传感器30再次实现对粘合间隙的精细控制30。粘合剂26的实际固化过程(步骤s470)典型地可以持续数天。在这种情况下,可选地在粘合剂26已经固化并且致动器20已经可靠地固定到反射镜10的合适时间段(例如24小时)之后,z方向上可移动的桌115可以降低相对较小的距离(例如5μm),以便通过这种“自由移动”避免机械应力随后从致动器20经由粘合剂26传递到光学元件10。
[0050]
向(特别是压电)致动器20施加电流同样可以在步骤s460中并且例如仍然在可选的自由移动之前实行,但是出于安全原因优选在致动器的精细定位之后实行。
[0051]
在其他实施例中,(特别是压电)致动器还可以具有多个部分表面,在根据图4的步骤s450中在各个情况下向该多个部分表面施加粘合剂以便产生粘合接合。在这种情况下,如图5a-5c中示意性所示,相应施加的粘合剂的量可以取决于具体的几何形状而变化,其目的是在具有限定的粘合间隙的相应边缘表面处获得均匀的弯月面形成。
[0052]
为此,图5a首先示意性地示出了在致动器501与光学元件500之间的粘合间隙501的形成以及在边缘区域处弯月面(meniscus)502的形成。根据图5b,致动器具有不同类型的部分表面(“类型1
”‑“
类型4”),其关于边缘区域(圆形段或外边缘)彼此不同,其中弯月面在粘合接合的过程中相应地形成。在这方面,作为示例,对于图5c中示意性示出的“类型1”的(“内”)部分表面,弯月面仅在四个圆形段512处形成,而不在较短或较长的外边缘513、514处形成。相比之下,对于“类型2”的部分表面,弯月面还形成在除了四个圆形段以外的较短外边缘处;对于“类型3”的部分表面,弯月面还形成在除了四个圆形段以外的较长外边缘处;并且对于“类型4”的部分表面,弯月面还形成在除了四个圆形段以外的较短外边缘和较长外边缘处。因此,对于“类型1”的部分表面所施加的粘合剂的量优选地选择为小于对于“类型2”的部分表面所施加的粘合剂的量,并且对于“类型2”和“类型3”的部分表面所施加的粘合剂的量选择为小于对于“类型4”的部分表面所施加的粘合剂的量,等等。
[0053]
在其他实施例中,当在图1d和步骤s450中施加粘合剂时,还可以考虑相关致动器表面在相应位置处的相应倾斜位置或角位置(即在粘合点位置中选择合适的余量),因此只有在粘合剂以由相应倾斜位置管控的方式流入其中之后,才建立粘合点的期望设定点位置。这在图6中图示出。通过对应余量的选择,对应地考虑粘合剂的粘度(优选是预先确定的)。
[0054]
图7示出了对于euv下操作所设计的并且其中可以实现本发明的示例性投射曝光设备的示意图。
[0055]
根据图7,对于euv所设计的投射曝光设备700中的照明装置包括场分面反射镜703和光瞳分面反射镜704。来自包括等离子体光源701和集光器反射镜702的光源单元的光被指引到场分面反射镜703上。第一望远镜反射镜705和第二望远镜反射镜706布置在光瞳分面反射镜704下游的束路径中。偏转反射镜707布置在光路的下游,所述偏转反射镜将入射其上的辐射指引到包括六个反射镜751-756的投射镜头的物平面中的物场上。在物场的位置处,反射结构承载的掩模721布置在掩模台720上,借助于投射镜头将所述掩模成像到像平面中,其中涂覆有感光层(光刻胶)的基板761位于晶片台760上。
[0056]
在其他应用中,本发明还可以在对于duv下操作所设计的投射曝光设备中来实现。
[0057]
图8示出了微光刻投射曝光设备800的其他可能构造的示意图,该微光刻投射曝光设备800被设计为在duv范围(例如近似193nm)的波长处操作并且同样地包括照明装置801和投射镜头808。
[0058]
照明装置801包括光源802和照明光学单元,该照明光学单元以高度简化方式由透镜元件803、804和光阑805表示。当使用arf准分子激光器作为光源802时,在所示示例中的投射曝光设备800的操作波长为193nm。然而,操作波长例如还可以在使用krf准分子激光器作为光源802时是248nm或者在使用f2激光器作为光源802时是157nm。在照明装置801和投射镜头808之间,掩模807布置在投射镜头808的物平面op中,所述掩模通过掩模保持件806保持在束路径中。掩模807具有微米至纳米范围的结构,该结构例如通过投射镜头808被缩小4或5倍地成像到投射镜头808的像平面ip上。投射镜头808包括限定光轴oa的透镜元件布置,所述透镜布置同样仅以高度简化的方式由透镜元件809至812表示。
[0059]
将已配备有感光层815并通过基板保持件818定位的基板816或晶片保持在投射镜头808的像平面ip中。例如可以是去离子水的浸没介质850坐落在投射镜头808的最后位于
像平面侧上的光学元件820与感光层815之间。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1