相机模块及具有相机模块的电子设备的制作方法
相机模块及具有相机模块的电子设备
1.相关申请的交叉引用
2.本申请要求于2020年3月3日在韩国知识产权局提交的第10
‑
2020
‑
0026789号韩国专利申请以及2020年5月29日在韩国知识产权局提交的第10
‑
2020
‑
0065281号韩国专利申请的优先权,出于所有目的将这些韩国专利申请的全部公开内容通过引用并入本申请中。
技术领域
3.本申请涉及相机模块以及具有相机模块的电子设备。
背景技术:
4.近来,除了智能电话之外,在诸如平板个人计算机(pc)、膝上型计算机等的移动通信终端(电子设备)中已经安装了超小型相机模块。
5.随着移动通信终端的小型化,由于在拍摄图像时手抖动的显著影响,由此拍摄的图像的质量可能降低。因此,可能需要用于补偿手抖动的技术以获得清晰的图像。
6.当在拍摄图像的同时发生手抖动时,可以使用光学图像防抖(ois)致动器来补偿手抖动。ois致动器可以在垂直于光轴的方向上移动透镜模块。
7.然而,由于相机模块的抖动并不总是仅在垂直于光轴的方向上发生,因此当透镜模块在垂直于光轴的方向上移动时,对补偿抖动可能存在局限性。
8.现有的光学成像防抖(ois)模块可以通过在垂直于光轴的多个方向上水平地移动透镜模块来防止少量的手抖动。然而,这种现有的ois模块在补偿于拍摄运动图像时发生的连续抖动方面可能受到限制。
9.由于现有的光学成像防抖(ois)模块可以通过在垂直于光轴的多个方向上水平移动透镜模块来防止少量的手抖动,因此传统的ois模块在实现于拍摄运动图像时作为附加功能所需的跟踪功能方面存在局限性。
技术实现要素:
10.提供本发明内容部分旨在以简要的形式介绍对发明构思的选择,而在以下的具体实施方式部分中将进一步描述这些发明构思。本发明内容部分目的不在于确认所要求保护的主题的关键特征或必要特征,也不籍此帮助确定所要求保护的主题的范围。
11.在一个总的方面,相机模块包括壳体以及在光轴方向上依次设置在壳体中的第一框架和第二框架。第二框架包括透镜模块,透镜模块配置成与第二框架一起绕第一旋转轴和第二旋转轴旋转,第一旋转轴和第二旋转轴与光轴方向相交。第一旋转轴通过设置在壳体和第一框架在光轴方向上相对的表面之间的第一球构件而形成在与光轴方向相交的方向上。第二旋转轴通过设置在第一框架和第二框架在光轴方向上相对的表面之间的第二球构件而形成在与光轴方向和第一旋转轴相交的方向上。
12.第一球构件和第二球构件可设置成分别在其相同位置旋转或保持在固定状态。
13.第一旋转轴和第二旋转轴的交点可以与光轴重合。
14.第一旋转轴和第二旋转轴可以以直角相交。
15.壳体可以具有矩形的盒轮廓,并且第一旋转轴和第二旋转轴中的每个可以相对于壳体对角地形成。
16.第二框架可以包括设置在透镜模块下方的图像传感器,并且图像传感器可以与透镜模块一起旋转。
17.透镜模块的光轴可以随着第二框架的旋转而相应地改变。
18.第二框架可以包括其上安装图像传感器的传感器基板,并且传感器基板可以通过柔性基板连接到包括在壳体中的主基板。
19.柔性基板可以包括信号线或电力线,该信号线或该电力线被划分成彼此分开的多条信号线或多条电力线。
20.柔性基板可以包括各自连接到主基板的边缘以形成十字形的多个柔性基板。
21.第二框架或透镜模块可以包括第一磁性材料,壳体或连接到壳体的辅助构件包括第二磁性材料,并且第二框架可以通过第一磁性材料和第二磁性材料的磁力被吸引到壳体。
22.第一磁性材料可以是吸引磁体,第二磁性材料可以是吸引轭。
23.第一磁性材料和第二磁性材料可以设置成沿着光轴以规则的间隔隔开。
24.在另一个总的方面,相机模块包括固定部分和旋转模块部分,固定部分包括壳体,旋转模块部分设置在壳体中并形成可移动部分。旋转模块部分包括透镜模块、图像传感器和第一磁性材料。透镜模块和图像传感器配置成绕与光轴方向相交的第一旋转轴和第二旋转轴旋转。固定部分包括第二磁性材料,并且旋转模块部分通过第一磁性材料和第二磁性材料的磁力被吸引到固定部分。
25.第一磁性材料和第二磁性材料可以设置成沿着光轴以规则的间隔隔开。
26.在另一个总的方面,电子设备包括具有不同视场的多个相机模块。这些相机模块中的一个包括壳体以及在光轴方向上依次设置在壳体中的第一框架和第二框架。第二框架包括透镜模块,透镜模块配置成与第二框架一起绕第一旋转轴和第二旋转轴旋转,第一旋转轴和第二旋转轴与光轴方向相交。第一旋转轴通过设置在壳体和第一框架在光轴方向上相对的表面之间的第一球构件而形成在与光轴方向相交的方向上。第二旋转轴通过设置在第一框架和第二框架在光轴方向上的相对表面之间的第二球构件而形成在与光轴方向和第一旋转轴相交的方向上。
27.第一球构件和第二球构件可设置成分别在其相同位置旋转或保持在固定状态。
28.第一旋转轴和第二旋转轴的交点可以与光轴重合。
29.第一旋转轴和第二旋转轴可以以直角相交。
30.壳体可以具有矩形的盒轮廓,并且第一旋转轴和第二旋转轴中的每个可以相对于壳体对角地形成。
31.第二框架可以包括设置在透镜模块下方的图像传感器,并且图像传感器可以与透镜模块一起旋转。
32.透镜模块的光轴可以随着第二框架的旋转而相应地改变。
33.第二框架可以包括其上安装图像传感器的传感器基板,并且传感器基板可以通过柔性基板连接到包括在壳体中的主基板。
34.柔性基板可以包括信号线或电力线,该信号线或该电力线被划分成彼此分开的多条信号线或多条电力线。
35.柔性基板可以包括各自连接到主基板的边缘以形成十字形的多个柔性基板。
36.第二框架或透镜模块可以包括第一磁性材料,壳体或连接到壳体的辅助构件可以包括第二磁性材料,并且第二框架可以通过第一磁性材料和第二磁性材料的磁力被吸引到壳体。
37.第一磁性材料可以是吸引磁体,并且第二磁性材料可以是吸引轭。
38.第一磁性材料和第二磁性材料可以设置成沿着光轴以规则的间隔隔开。
39.根据下面的具体实施方式、附图和权利要求,其它特征和方面将显而易见。
附图说明
40.图1是根据示例的相机模块的组装立体图。
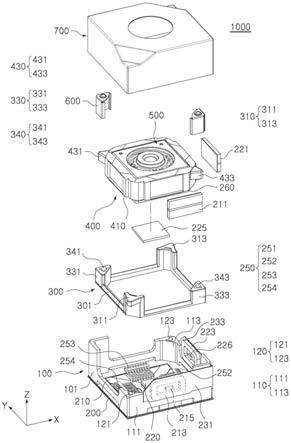
41.图2是根据示例的相机模块的分解立体图。
42.图3是沿着图1中的线i
‑
i’截取的图1的相机模块的截面立体图。
43.图4是沿着图1中的线ii
‑
ii’截取的图1的相机模块的截面立体图。
44.图5是沿着图1中的线iii
‑
iii’截取的图1的相机模块的截面立体图。
45.图6是根据示例的相机模块的底部投影图(其中透明地示出了辅助基板)。
46.图7a至图7h是示出根据示例的可以设置在传感器基板上的具有各种结构的连接基板的参考图。
47.图8是根据示例的主基板的平面图。
48.图9是示出根据示例的在相机模块中旋转模块绕第一旋转轴和第二旋转轴旋转的形状的参考图。
49.图10是示出根据示例的在相机模块中通过第一磁性材料和第二磁性材料施加将旋转模块吸引到壳体的力的结构的参考图。
50.图11是根据示例的便携式电子设备的立体图。
51.图12是示出根据示例的安装在便携式电子设备中的多个相机模块的视场的参考图。
52.图13是示出根据示例的安装在便携式电子设备上的多个相机模块拍摄的图像的参考图。
53.在整个附图和具体实施方式中,相同的附图标记表示相同的元件。并且为了清楚、说明和方便,附图可能未按比例绘制,并且附图中的元件的相对尺寸、比例和描绘可能被夸大。
具体实施方式
54.提供以下具体实施方式以帮助读者获得对本申请中所描述的方法、装置和/或系统的全面理解。然而,本申请中所描述的方法、装置和/或系统的各种改变、修改和等同在理解本申请的公开内容之后将是显而易见的。例如,本申请中所描述的操作的顺序仅仅是示例,并且除了必须以特定顺序发生的操作之外,不限于在本申请中所阐述的顺序,而是可以改变的,这在理解本申请的公开内容之后将是显而易见的。另外,为了更加清楚和简洁,可
省略对在理解本申请的公开内容之后已知的特征的描述。
55.本申请中所描述的特征可以以不同的形式实施,而不应被理解为受限于本申请中所描述的示例。更确切地,提供本申请所描述的示例仅仅是为了说明实现本申请中描述的方法、装置和/或系统的许多可能的方式中的一些方式,这在理解本申请的公开内容之后将是显而易见的。
56.本公开涉及相机模块,并且可以应用于诸如移动通信终端、智能电话、平板pc等的便携式电子设备。
57.相机模块是用于拍摄静止图像或运动图像的光学设备。相机模块可以包括折射从对象反射的光的透镜以及使透镜移动以调整焦点或补偿抖动的透镜驱动设备。
58.本公开的一方面是提供相机模块,即使在通过对运动对象进行成像而获得的运动图像以及通过对固定对象进行成像而获得的静止图像中,该相机模块也能够容易地调节抖动。
59.本公开的一方面是提供相机模块,该相机模块在拍摄运动图像时能够以足够宽的角度旋转以实现跟踪功能。
60.图1是根据示例的相机模块的组装立体图,以及图2是根据示例的相机模块的分解立体图。
61.参考图1和图2,根据示例,相机模块1000可以包括设置在壳体100中的抖动补偿模块。抖动补偿模块可以包括设置在其中的自动聚焦模块。
62.抖动补偿模块(或旋转模块,为了便于描述,以下称为抖动补偿模块)可以由壳体100的主体101、在光轴方向(z轴方向)上依次设置在壳体100中的第一框架300和第二框架400以及抖动补偿致动器来实现。第一框架300和第二框架400可以是在壳体100内旋转以实现抖动补偿(或跟踪)的抖动补偿部分(或者旋转模块部分,为了便于描述,以下称为抖动补偿部分)。
63.例如,构成可移动部分的抖动补偿部分可以包括透镜模块和图像传感器,并且可移动部分(抖动补偿部分、透镜模块和图像传感器)可以相对于包括壳体100的固定部分旋转。
64.自动聚焦模块可以通过设置在第二框架400中的透镜模块500来实现,并且透镜模块500可以包括用于实现自动聚焦功能的致动器。
65.由于自动聚焦模块设置在抖动补偿模块中,因此包括构成自动聚焦模块的线圈和磁体的自动聚焦致动器与图像传感器一起在实现抖动补偿期间移动。因此,在该示例中,需要用于向自动聚焦线圈和图像传感器提供电力并发送控制信号的连接基板250的结构。
66.在下文中,将更详细地描述抖动补偿模块,并且将描述连接到设置在抖动补偿模块中的自动聚焦模块的连接基板250的结构。
67.图3是沿着图1中的线i
‑
i’截取的图1的相机模块的截面立体图。
68.图4是沿着图1中的线ii
‑
ii’截取的图1的相机模块的截面立体图。图5是沿着图1中的线iii
‑
iii’截取的图1的相机模块的截面立体图。图9是示出根据示例的在相机模块中旋转模块绕第一旋转轴和第二旋转轴旋转的形状的参考图。图10是示出根据示例的在相机模块中旋转模块通过第一磁性材料和第二磁性材料向壳体施加吸引力的结构的参考图。
69.在图3至图5以及图9和图10中,根据该示例,相机模块1000的抖动补偿模块可以包
括壳体100以及在光轴方向上依次设置在壳体100内的第一框架300和第二框架400。
70.如图9中所示,第一旋转轴ra1可以通过位于壳体100和第一框架300在光轴方向上相对的表面之间的至少两个第一球构件形成,并且第二旋转轴ra2可以通过位于第一框架300和第二框架400在光轴方向上相对的表面之间的至少两个第二球构件形成。该至少两个第一球构件设置在与光轴方向相交的方向上,并且该至少两个第二球构件设置在与光轴方向和第一旋转轴方向相交的方向上。
71.第一框架300可以绕与光轴方向(z轴方向)相交(或垂直)的第一旋转轴ra1旋转。
72.壳体100可以包括位于主体101上的第一引导件110(111和113),并且第一框架300可以包括第二引导件310(311和313)。支承件(例如,第一球构件120(121和123))可以设置在第一引导件111和113与第二引导件311和313之间。由于支承件可以是用于引导旋转的任何支承件,因此支承件可以具有各种形状,诸如球形形状或圆柱形形状、尖头形形状、半球形形状等。
73.第一引导件110(111和113)与第二引导件310(311和313)可以各自包括两个引导件。因此,第一球构件120(121和123)也可以包括两个球构件。此外,第一旋转轴ra1可以是将两个支承件121和123互连的假想线,并且第一框架300可以绕第一旋转轴ra1旋转。
74.在该示例中,两个第一球构件121和123可以设置在垂直于光轴(z轴)的第一旋转轴ra1的方向上。例如,假设根据该示例的壳体100具有大致矩形的盒形状并且垂直于光轴的x轴方向和y轴方向平行于形成壳体100的边的方向,则第一球构件121和123可以设置在具有x轴和y轴作为边的矩形的角部上。因此,第一旋转轴ra1可以形成在矩形的对角线方向上。
75.例如,壳体100具有带矩形的盒形状的主体101,并且主体101可以在光轴方向上是中空的。此外,第一引导件111和113可设置在主体101的角部上,使得两个第一球构件121和123对角地设置。第一引导件111和113可以在光轴方向上向上突出。
76.例如,第一框架300具有带矩形的框架形状的主体301,并且主体301可以在光轴方向上是中空的。此外,两个第二引导件311和313可设置在主体301的角部上,以与第一引导件111和113相对,使得两个第一球构件121和123对角地设置。
77.第一引导件111和113以及第二引导件311和313可以分别包括引导凹槽,使得第一球构件121和123插置于第一引导件111和113以及第二引导件311和313在光轴方向上相对的表面上以被固定或防止被分离。
78.第二框架400可以绕第二旋转轴ra2旋转,第二旋转轴ra2与光轴(z轴)相交或垂直并且与第一旋转轴ra1相交或垂直。第一旋转轴ra1和第二旋转轴ra2的交点可以与光轴相遇,并且第一旋转轴ra1和第二旋转轴ra2可以彼此垂直相交。此外,第一旋转轴ra1和第二旋转轴ra2可以平行于与光轴垂直的方向,并且可以沿光轴方向设置在基本上相同的高度处。
79.第一框架300可包括位于主体301上的第三引导件330(331和333),并且第二框架400可包括第四引导件430(431和433)。支承件(例如,第二球构件340(341和343))可以设置在第三引导件331和333与第四引导件431和433之间。由于支承件可以是用于引导旋转的任何支承件,因此支承件可以具有各种形状,诸如球形形状或圆柱形形状、尖头形形状、半球形形状等。
80.第一球构件121和123以及第二球构件341和343可以设置成在其相同的位置旋转或者保持在固定状态。
81.第三引导件330(331和333)与第四引导件430(431和433)各自可包括两个引导件。因此,第二球构件340(341和343)也可以包括两个球构件。此外,第二旋转轴ra2可以是连接两个支承件341和343的假想线,并且第二框架400可以绕第二旋转轴ra2旋转。
82.在该示例中,两个第二球构件341和343可以设置在第二旋转轴ra2的方向上,第二旋转轴ra2垂直于光轴(z轴)并且与第一旋转轴ra1相交(或垂直)。例如,假设根据该示例的第一框架300具有基本上矩形的形状,并且垂直于光轴的x轴方向和y轴方向平行于形成第一框架300的边的方向,则第二球构件341和343可以设置在具有x轴和y轴作为边的矩形的角部上。因此,第二旋转轴ra2可以形成在该矩形的对角线方向上。
83.例如,第一框架300可以具有带矩形的盒形状的主体301,并且主体301可以在光轴方向上是中空的。此外,第三引导件331和333可设置在主体301的角部上,使得两个第二球构件341和343对角地设置。第三引导件331和333可以在光轴方向上向上突出。
84.例如,第二框架400可以具有带矩形的框架形状的主体410,并且主体410可以在光轴方向上是中空的。此外,两个第四引导件431和433可设置在主体410的角部上,以与第三引导件331和333相对,使得第二球构件341和343对角地设置。
85.第三引导件331和333以及第四引导件431和433可以分别包括引导凹槽,使得第二球构件341和343插置于第三引导件331和333以及第四引导件431和433在光轴方向上相对的表面上,以固定第二球构件341和343的位置或防止第二球构件341和343分离。
86.如上所述,根据该示例,第一框架300可相对于壳体100绕第一旋转轴ra1旋转,并且第二框架400可相对于第一框架300绕第二旋转轴ra2旋转。此外,由于第二框架400由第一框架300支撑,因此第二框架400可以在第一框架300相对于壳体100旋转时一起旋转。
87.图10示出了根据示例的在相机模块中通过第一磁性材料和第二磁性材料施加将旋转模块吸引到壳体的力的原理。
88.例如,第一框架300和第二框架400分别依次放置在壳体100上,且第一球构件121和123以及第二球构件341和343插置在它们之间。因此,当这种结构受到冲击或抖动时,可能在光轴方向上形成间隙而使第一框架300和第二框架400彼此分离。
89.因此,第一磁性材料220和第二磁性材料225选择性地设置于在光轴方向上设置在最上部分上的第二框架400下方,并设置在壳体100的底表面上以防止这种分离。将第二框架400吸引到壳体100的磁力可以由第一磁性材料220和第二磁性材料225产生。因此,第一框架300可吸引到壳体100,并且第二框架400可吸引到第一框架300。
90.第一磁性材料220和第二磁性材料225可以设置成在光轴方向上彼此相对。
91.第一磁性材料220或第二磁性材料225是磁性材料,并且可以是在磁场中磁化的材料(包括金属材料和非金属材料二者)。第一磁性材料220或第二磁性材料225可以是吸引磁体或吸引轭。
92.例如,当第一磁性材料220是吸引磁体时,第二磁性材料225可以是吸引轭或吸引磁体。此外,当第一磁性材料220是吸引轭时,第二磁性材料225可以是吸引磁体。在下文中,为了便于描述,将对吸引磁体220设置在壳体100中并且吸引轭225设置在第二框架400中的示例进行描述。
93.由于第二框架400通过吸引轭225和吸引磁体220的吸引力被吸引到壳体100,因此可以防止第一框架300或第二框架400分离。
94.此外,在该示例中,吸引轭225和吸引磁体220可设置成使得即使在不施加电力时,透镜模块500也通过吸引轭225和吸引磁体220的吸引力而被固定到预定位置以达到平衡。
95.因此,第一磁性材料220和第二磁性材料225可以沿着光轴设置。更特别地,第一磁性材料220和第二磁性材料225可以沿着光轴以规则的间隔设置,并且可以设置在第一旋转轴ra1和第二旋转轴ra2的交点下方。光轴可以指实际光轴(图9中的ox),例如,在多个透镜于光轴方向上堆叠的状态下形成的连接该多个透镜的中心的线。
96.在该示例中,为了易于描述,将对吸引轭225设置在第二框架400下方而吸引磁体220设置在壳体100的底表面上的结构进行描述。
97.吸引轭225可以在光轴方向上安装在第二框架400的下部上,详细地,安装在设置于透镜模块500的底表面上的传感器基板260的下表面上。
98.吸引磁体220可安装成设置在安装于壳体100中的主基板200的中空部分中。
99.例如,可以在主基板200的中空部分中设置单独的辅助基板210,辅助基板210固定到主基板200的在光轴方向上的下表面的内边缘或者从内边缘延伸到光轴ox。此外,可以在辅助基板210的上表面上在光轴方向上将吸引磁体220设置在与吸引轭225相对的位置。
100.可替换地,吸引磁体220可以安装在安装有相机模块1000的设备(例如,图11中所示的便携式终端(电子设备))中。例如,相机模块1000的主基板200可以具有中空部分201,并且相机模块1000可以首先安装在该设备中,使得吸引磁体220暴露成与吸引轭225相对。
101.在该示例中,辅助构件600可以设置在盖700和第二框架400之间。辅助构件600可包括止动件、阻尼器、缓冲构件等。此外,辅助构件600可以设置成从上方覆盖第四引导件431。
102.在该示例中,可以提供抖动补偿驱动部分。抖动补偿驱动部分可以提供驱动力以旋转第一框架300和第二框架400。
103.抖动补偿驱动部分可以由选择性地设置在壳体100和第二框架400中的线圈213和223以及磁体211和221来实现。抖动补偿驱动部分应提供驱动力,使得第一框架300和第二框架400分别绕第一旋转轴ra1和第二旋转轴ra2旋转。因此,可以提供各自包括线圈和磁体的两组抖动补偿驱动部分。
104.在该示例中,两个磁体211和221设置在第二框架400的侧表面上,并且两个线圈213和223设置在壳体100的侧表面上以分别与两个磁体211和221相对。然而,本公开不限于这种结构,并且两个线圈可以设置在第二框架400的侧表面上,且两个磁体可以设置在壳体100上。
105.在两个磁体设置在壳体100的侧表面上的后一种情况下,轭可以设置成覆盖壳体100的外表面,这致使可以防止在抖动补偿驱动部分中产生的磁场泄漏的附加效果。在这种结构中,即使当相机模块安装成与另一相机模块相邻时,也没有泄漏的磁场对另一相机模块产生影响。因此,当在单个设备中将多个相机安装成与彼此相邻时,可以显著增加自由度。
106.尽管将在下面描述,但是在该示例中,图像传感器261与第二框架400一起旋转,并且自动聚焦模块设置在第二框架400中,使得附加的电力线和信号线应当连接到设置在第
二框架400中的传感器基板260。因此,抖动补偿驱动线圈可以在某种程度上容易地设置在第二框架400中。
107.该示例的抖动补偿驱动部分可以连续地感测第一框架300的位置和第二框架400的位置以进行驱动控制。为了执行这种位置感测,位置检测传感器215和226可以设置成分别与两个磁体211和221相对。位置检测传感器215和226中的每个可以是霍尔传感器。
108.线圈213和223以及位置检测传感器215和226可以在它们分别安装在线圈基板231和233上的状态下固定到壳体100。线圈基板231和233中的每个可以连接到与壳体100联接的主基板200。详细地,线圈基板231和233可以分别连接到主基板200的线圈基板连接端子202和203。
109.线圈基板231和233中的每个或者主基板200可以是柔性基板或刚性基板。线圈基板231和233以及主基板200可以整体形成或单独地设置,并且然后通过端子等彼此连接。
110.该示例的主基板200可以联接到壳体100的底表面,并且可以在光轴方向上具有中空部分201。
111.向抖动补偿线圈提供电力和信号的线圈基板231和233以及向自动聚焦线圈提供电力和信号的连接基板251、252、253和254以及传感器基板260可以连接到主基板200。
112.另外,参考图3至图5,根据该示例的相机模块1000的透镜模块500可以设置在第二框架400中。
113.透镜模块500包括:透镜镜筒,多个透镜在光轴方向上堆叠在透镜镜筒中;以及自动聚焦模块,其允许透镜镜筒在光轴方向上移动。
114.此外,透镜模块500设置在第二框架400中,以在第二框架400绕第一旋转轴ra1和第二旋转轴ra2旋转时一起旋转。因此,由于透镜模块500的光轴一起移动以与第二框架400的旋转对应,所以透镜模块500的光轴ox也可以旋转(移动)。因此,透镜模块500包括图像传感器261,在图像传感器261中穿过透镜镜筒的多个透镜的光被形成为图像。例如,第二框架400包括图像传感器261以及透镜模块500。
115.结果,透镜模块500包括自动聚焦模块和图像传感器,因此该示例的相机模块1000需要旋转(移动)构件、可以向透镜模块500提供电力和信号的柔性连接线(柔性基板)。此外,连接线可以设置成具有足够的柔性,从而不会因安装在第二框架400中的透镜模块500的旋转运动而断开或分离。
116.图6是根据示例的相机模块的底部投影图(其中透明地示出了辅助基板)。图7a至图7h是示出根据示例的可以设置在传感器基板上的具有各种结构的连接基板的参考图。图8是根据示例的主基板的平面图。
117.另外,参考图6至图8,将进一步详细描述该示例的相机模块1000的连接基板251、252、253和254。
118.透镜模块500包括其上安装有图像传感器261的传感器基板260。向用于对透镜模块500进行自动聚焦的线圈提供电力的线圈基板可以连接到传感器基板260。
119.传感器基板260可以通过连接基板连接到相机模块1000的主基板200。连接基板可以是柔性基板(fpc)。例如,连接基板251、252、253和254可以设置成通过将至少一些信号线或电力线分开而具有多股线。因此,由于每条线被划分成多股线,所以可以容易地进行弯曲以充分地实现第二框架400的运动。
120.当然,即使当连接基板251、252、253和254分开设置时,连接基板251、252、253和254的两个端部上也设置有端子,以将连接基板251、252、253和254中的一些的一个端部连接到传感器基板260,并将连接基板的其它端部连接到主基板200。可替代地,连接基板251、252、253和254中的一些的一个端部可以与传感器基板260集成在一起,并且只有连接基板的其它端部可以包括稍后连接到主基板200的端子。当连接基板251、252、253和254与传感器基板260集成在一起时,连接基板251、252、253和254可以与传感器基板260一起设置成根据半导体制造工艺提供的堆叠结构。
121.连接基板251、252、253和254可以被划分成四个连接基板。例如,一个端部可以连接到矩形的传感器基板260的四个边中的每个。在被划分成四个连接基板的连接基板251、252、253和254可以弯曲若干次之后,弯曲的连接基板251、252、253和254的其它端部中的每个可以连接到主基板200。由于连接基板251、252、253和254被划分成四个连接基板并且分别连接到传感器基板260的四个边,因此可以容易地进行弯曲以充分地实现第二框架400的运动。
122.更特别地,在被划分成四个连接基板的连接基板251、252、253和254弯曲若干次之后,例如,弯曲的连接基板251、252、253和254的其它端部可以在光轴方向上通过具有矩形形状的中空部分201连接到主基板200的下表面。因此,连接基板连接端子205、206、207和208可以沿着中空部分201的边缘在光轴方向上设置在主基板200的下表面上。连接基板连接端子205、206、207和208可以设置在形成矩形的中空部分201的边中的每个上。
123.线圈基板连接端子202和203可以沿着主基板200的上表面的边缘在光轴方向上设置在主基板200的上表面上。
124.图7a至图7h示出了根据各种示例的连接基板各自设置在传感器基板上的结构。在该示例中,连接基板可以具有足够的耐久性,并且可以具有即使在其被反复使用时也能够显著减少变形或损坏的结构。
125.参考图7a和图7b,根据示例,连接基板251、252、253和254可以在矩形的传感器基板260的每一边上一对一地设置。在这种情况下,连接基板251、252、253和254中的每个的电力线或控制线可以分支成至少两条电力线或控制线。连接基板251、252、253和254中的每个可以通过各种方法(诸如,焊接和使用导电粘合剂的粘附)联接到传感器基板260的上表面或下表面,或者连接基板251、252、253、254中的每个可以与传感器基板260集成在一起。当连接基板251、252、253和254可以与传感器基板260集成在一起时,它们可以与传感器基板260一起设置成根据半导体制造工艺提供的堆叠结构,并且连接基板251、252、253和254可以从传感器基板260的侧表面延伸。
126.参考图7c至图7e,根据示例,连接基板251、252、253和254可以在矩形的传感器基板260的每一边上一对一地设置。此外,连接基板251、252、253和254可以整体地联接到传感器基板260(半导体工艺等),或者可以单独地制造,并且然后通过各种方法联接,诸如相互焊接、使用导电粘合剂的粘附等。
127.参考图7c,分别连接到传感器基板260的边的连接基板251、252、253和254可以设置成具有弯曲形状,就好像覆盖传感器基板260的边缘一样。参考图7d,连接基板251、252、253和254中的每个可以包括一个或多个倒角的部分251a、251b、251c、252a、252b、252c、253a、253b、253c、254a、254b和254c,连接基板251、252、253和254中的每个设置为具有弯曲
部分被切割的形状。
128.参考图7e,连接基板251、252、253和254中的每个可以包括设置成在长度方向上延伸的一个或多个切割型狭缝251d、252d、253d和254d。
129.图7f至图7h示出了根据示例的连接基板的这样的结构,在该结构中,在连接基板的中央设置有弯曲部分使得另一端子部分设置在与设置有传感器基板的平面不同的平面上。每个连接基板可以整体地联接到传感器基板260(半导体工艺等)或者单独制造,并且然后通过各种方法(诸如,相互焊接、使用导电粘合剂的粘附等)联接。
130.参考图7f,连接基板251、252、253和254可以在矩形的传感器基板260的每一边上一对一地设置。分别设置在传感器基板260的边上的连接基板251、252、253和254可以设置成具有弯曲形状,就好像覆盖传感器基板260的边缘一样。
131.连接基板251、252、253、254可以包括弯曲部分251e、252e、253e和254e,每个弯曲部分具有弯曲至少一次的中央部分,使得连接基板251、252、253和254的与连接到传感器基板260的端部相对的端部设置在与设置有传感器基板260的平面不同的平面上。
132.参考图7g,连接基板255和256可以在矩形的传感器基板260的相对边中的每个上一对一地设置。连接基板255和256可以包括弯曲部分255e和256e,弯曲部分255e和256e各自具有弯曲至少一次的中央部分,使得连接基板255和256的与连接到传感器基板260的端部相对的端部设置在与设置有传感器基板260的平面不同的平面上。在这种情况下,传感器基板260与连接基板255和256之间在光轴方向上可以没有重叠的部分。
133.参考图7h,连接基板257和258可以一起设置在矩形的传感器基板260的同一边上。连接基板257和258可以包括弯曲部分257e和258e,弯曲部分257e和258e各自具有弯曲至少一次的中央部分,使得连接基板257和258的与连接到传感器基板260的端部相对的端部设置在与设置有传感器基板260的平面不同的平面上。在这种情况下,连接基板257和258可以弯曲到传感器基板260的下表面,使得传感器基板260与连接基板257和258在光轴方向上重叠。此外,连接基板257和258上可以设置有在垂直于光轴的方向上折叠的一个或多个折叠部分257a、257b、258a和258b。此外,连接基板257和258可以包括在长度方向上形成的一个或多个狭缝257c和258c。
134.图11是根据示例的便携式电子设备的立体图。便携式电子设备1可以是例如移动通信终端、智能电话、平板pc等。
135.如图11中所示,便携式电子设备1可以配备有多个相机模块以拍摄对象。例如,便携式电子设备1可以包括第一相机模块1000和第二相机模块2000。
136.在示例中,第一相机模块1000和第二相机模块2000具有不同的视场。例如,第一相机模块1000和第二相机模块2000中的一个包括长焦相机,并且另一个包括广角相机。第一相机模块1000可以配置成具有相对窄的视场(例如,长焦),并且第二相机模块2000可以配置成具有相对宽的视场(例如,广角)。可替代地,第一相机模块1000可以是广角相机,并且第二相机模块2000可以是长焦相机。
137.如上所述,两个相机模块1000和2000被设计成具有不同的视场,并且因此,可以以不同的深度拍摄对象的图像。
138.因此,根据该示例,相机模块1000可以基于绕两个轴旋转的结构来实现抖动补偿,并且可以由于图像传感器与旋转的透镜模块500一起旋转而恒定地保持焦点。此外,透镜模
块500的每条信号线和每条电力线可以被分开成具有多股线,并且可以分支成四条线,以充分地实现成对透镜模块500的旋转驱动没有影响。
139.如图12中所示,第一相机模块1000和第二相机模块2000可以配置成具有不同的视场。
140.在示例中,第一相机模块1000配置成具有相对窄的视场(例如,长焦相机),并且第二相机模块2000配置成具有相对宽的视角(例如,广角相机)。第一相机模块1000可对应于参考图1至图8描述的相机模块。
141.例如,第一相机模块1000的视场θ1可以形成为处于9度至35度的范围内,并且第二相机模块2000的视场θ2可以形成为处于60度至120度的范围内。
142.如上所述,两个相机模块1000和2000被设计成具有不同的视场,并且因此,可以以不同的深度拍摄对象的图像。
143.根据示例,便携式电子设备1可以包括画中画(pip)功能。
144.作为示例,便携式电子设备可以在由具有较宽视场的相机模块(例如,第二相机模块2000)拍摄的图像中显示由具有较窄视场的相机模块(例如,第一相机模块1000)拍摄的图像。
145.例如,可以以窄的视场拍摄感兴趣的对象(因此,可以放大感兴趣的对象)并且将其显示在以宽的视场拍摄的图像中。
146.由于在拍摄运动图像时感兴趣的对象可能运动,因此具有较窄视场的相机模块(例如,第一相机模块1000)可以包括旋转以拍摄感兴趣的运动对象的图像的反射模块。因此,入射在第一相机模块1000上的光可以在反射模块的反射构件上反射,并且然后在光路改变之后入射到透镜模块上。
147.例如,第一相机模块1000可以可旋转地移动反射模块以跟踪感兴趣对象的运动。
148.例如,设置在第一相机模块1000中的反射模块可以绕第一旋转轴ra1和第二旋转轴ra2旋转。因此,第一相机模块1000可以补偿在图像拍摄期间可能发生的抖动。
149.第一旋转轴可以指垂直于光轴(z轴)的轴,并且第二旋转轴可以指垂直于光轴(z轴)和第一旋转轴二者的轴。第一旋转轴和第二旋转轴(第一相机模块1000的反射模块的旋转轴)可以与光轴(z轴)相交。光轴(z轴)、第一旋转轴和第二旋转轴可以大致在某个点处相遇。
150.图13示出了可以使用安装在根据示例的便携式电子设备1中的第一相机模块1000和第二相机模块2000拍摄的对象的范围。
151.具有相对宽的视场的第二相机模块2000可以拍摄具有相对大的面积的对象的图像,并且具有相对窄的视场的第一相机模块1000可以拍摄具有相对小的面积的对象的图像。
152.特别地,第一相机模块1000可以在远程成像范围t1到t9内拍摄具有由第二相机模块2000拍摄的宽成像范围w的内部区域的图像。在远程成像范围t1至t9内拍摄的图像可以显示在宽成像范围w内拍摄的图像中。第一相机模块1000可以以远程成像范围t1至t9拍摄内部区域的一部分以及与宽成像范围w的外部重叠的一部分,或者可以拍摄宽成像范围w的外部区域。
153.由于第一相机模块1000包括绕与光轴(z轴)相交的第一旋转轴和第二旋转轴旋转
的反射模块,因此由第一相机模块1000拍摄的图像可以倾斜于由第二相机模块2000拍摄的图像,因为成像角度通过反射模块的旋转而改变。在图13的参考图中所示的远程成像范围中,t1至t3或者t6至t9是通过反射模块的旋转来改变角度的情况。
154.因此,在第一相机模块1000在远程成像范围中的t1至t3或者t6至t9内拍摄对象的图像的情况下,可以旋转所拍摄的图像以与第二相机模块2000的所拍摄的图像对准,从而实现pip功能。
155.为了实现这种功能,相机模块1000和2000或便携式电子设备1可以包括用于编辑图像或实现pip功能的控制器。
156.如上所述,根据示例,即使在通过对运动对象成像而获得的运动图像以及通过对固定对象成像而获得的静止图像中,相机模块也可以容易地调整相机抖动。
157.此外,根据示例,相机模块能够以足够宽的角度旋转,以在拍摄运动图像时实现跟踪功能。
158.虽然本公开包括具体示例,但是在理解本申请的公开内容之后将显而易见的是,在不背离权利要求及其等同方案的精神和范围的情况下,可对这些示例作出形式和细节上的各种改变。本申请中所描述的示例仅以描述性的意义进行理解,而非出于限制的目的。对每个示例中的特征或方面的描述应被认为是可适用于其它示例中的相似的特征或方面。如果以不同的顺序执行所描述的技术,和/或如果以不同的方式组合和/或通过其它部件或它们的等同件替换或补充所描述的系统、架构、设备或电路中的部件,则仍可实现适当的结果。因此,本公开的范围不由具体实施方式限定,而是由权利要求及其等同方案限定,且在权利要求及其等同方案的范围之内的所有变型应被理解为包括在本公开中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1