光学部件驱动机构和摄像装置及电子设备的制作方法
1.本发明属于电子设备配件技术领域,例如,光学棱镜驱动,尤其涉及一种光学部件驱动机构和摄像装置及电子设备。
背景技术:
2.潜望式马达其被广泛应用于各种摄像装置或者电子设备中。
3.现有的潜望式马达其一般采用双载体的结构,其承载光学棱镜,光学棱镜其有入射光轴和出射光轴,在使用防抖驱动结构的情况下,载体和底座之间采用驱动绕x轴和绕y轴使用的弹片是两种不同的弹片分别连接,不仅有成本的增加,还可能会出现双弹片晃动不一致的问题,也不利于手机摄像马达小型化的发展趋势;还有发明人设计了利用两个相对的弹片以对载体和底座进行弹性连接,每片弹片采用上侧和下侧两个连接点与载体连接,在载体绕x轴转动时,受限于四个连接点,导致需要非常大的x轴电磁扭矩力才能驱动载体绕x轴转动,不仅降低了载体绕x轴转动灵敏度,而且还缩小了载体绕x轴转动角度,设计不合理,影响摄像装置或者电子设备使用,不利于手机摄像马达小型化的发展趋势。
4.有鉴于此,本领域技术人员亟待改进光学部件驱动机构的结构,以期解决上述技术问题。
技术实现要素:
5.本发明的目的是针对上述问题,提供一种可以解决上述技术问题的光学部件驱动机构和摄像装置及电子设备。
6.为达到上述目的,本发明采用了下列技术方案:本光学部件驱动机构包括:底座,具有单载体容纳空间;单载体,位于单载体容纳空间内;弹片容纳空间,有两个,一个弹片容纳空间位于单载体的x轴一端和底座的x轴一端之间,另外一个弹片容纳空间位于单载体的x轴另一端和底座的x轴另一端之间;弹片,有两片,其中一片置于一个弹片容纳空间中并且分别与单载体和底座连接,另一片置于另外一个弹片容纳空间中并且分别与单载体和底座连接;弹片固定部,有两个并且一个弹片容纳空间中设置有一个弹片固定部,弹片固定部固定在单载体上并且每个弹片容纳空间中相应弹片的接触部连接在弹片固定部上,该弹片的底座连接部与底座连接;所述两片弹片沿着光学部件其入射光轴方向分布;电磁驱动机构,驱动单载体相对底座转动,协同弹片用于矫正光学部件折射光线的偏移。
7.在上述的光学部件驱动机构中,两片弹片以入射光轴呈对称分布,所述两片弹片处于同一个沿着光学部件其入射光轴方向的纵向面上。
8.在上述的光学部件驱动机构中,所述的弹片包括:接触部,呈片状并沿着入射光轴的纵向面分布;上腕部,其一端连接在接触部上侧边;下腕部,其一端连接在接触部下侧边;底座连接部,分别与上腕部的另一端连接,以及下腕部的另一端连接。
9.在上述的光学部件驱动机构中,所述的上腕部和下腕部呈对称分布。
10.在上述的弹性支撑机构中,所述的接触部、上腕部、下腕部和底座连接部合围内部形成中间小两端大的内闭合形变空间。
11.在上述的光学部件驱动机构中,所述的上腕部具有上l形外形变空间,所述的下腕部具有下l形外形变空间,所述的上l形外形变空间和下l形外形变空间呈对称分布。
12.在上述的光学部件驱动机构中,在每个弹片固定部上分别设有纵向固定平面,接触部服帖固定在纵向固定平面上在上述的光学部件驱动机构中,所述纵向面与入射光轴间隔分布,或者所述入射光轴位于纵向面上。
13.在上述的光学部件驱动机构中,所述的电磁驱动机构包括y轴电磁驱动机构和倾斜式的x轴电磁驱动机构。
14.在上述的光学部件驱动机构中,所述的x轴电磁驱动机构包括:x轴驱动磁石,倾斜固定在单载体上,并且x轴驱动磁石的轴心线与光学部件的入射光轴形成钝角夹角;x轴线圈,倾斜固定在电路板上并且位于x轴驱动磁石侧下方,x轴线圈倾斜方向与x轴驱动磁石倾斜部倾斜方向一致。
15.在上述的光学部件驱动机构中,x轴驱动磁石向下延长并伸入至x轴线圈内,x轴驱动磁石的下端端面和电路板之间留有间隙。
16.在上述的光学部件驱动机构中,所述x轴驱动磁石固定在单载体的中间倾斜部上。
17.在上述的光学部件驱动机构中,在电路板上具有电路倾斜部,所述x轴线圈固定在电路倾斜部上。
18.在上述的光学部件驱动机构中,所述y轴电磁驱动机构包括两块固定在单载体上的y轴驱动磁石,在底座上设有与所述y轴驱动磁石一一对应的y轴线圈,两块y轴驱动磁石位于两个y轴线圈之间。
19.在上述的光学部件驱动机构中,在电路板上设有两呈相对分布的电路侧部,每个电路侧部连接一y轴线圈。
20.本发明还公开了一种摄像装置,具有如上所述的光学部件驱动机构。
21.本发明还公开了一种电子设备,具有如上所述的摄像装置。
22.与现有的技术相比,本发明的优点在于:当x轴驱动机构驱动单载体绕x轴转动并实现单载体上的棱镜上下点头时,每片弹片和单载体采用一个连接点(一个接触部对应一个弹片固定部)连接,此时的单载体沿x轴有只有两个扭矩受力点,本申请的x轴转动扭矩只要9.97的电磁扭矩力就可以推动单载体转动1.5
°
的角度,利用非常小的扭矩力以推动单载体达到相同的角度角度,在大幅降扭矩力的同时,可大幅降低制造成本,以及大幅降低制造加工难度,以及可以进一步节能内部空
间,达到微小化应用目的。
23.其次,本申请利用两个受力点的结构,其可以扩大单载体绕x轴的转动角度,以满足更大角度的折射光效矫正要求和使用工况。
24.另外,本申请利用两个受力点,其不仅大幅提高了单载体绕x轴转动的灵敏度,而且还大幅提高了棱镜对于折射光线的矫正效率,设计更加合理。
25.利于小型化应用,设计更加合理,同时,绕x轴旋转能够使得单载体实现上下点头,绕y轴旋转能够使得单载体实现左右摇头。
26.利用倾斜式的x轴驱动,其可以使得在驱动单载体时绕x轴转动,以矫正折射光线,效率高。
27.电路倾斜部则对应倾斜分布的x轴电磁驱动,然后协同y轴电磁驱动,利用这种最终的倾斜驱动方式,其可以在驱动时使得棱镜在调整偏移时具有绕x轴和y轴同时旋转的位置调整,x/y轴方向姿势差非常小,使得调整偏移效率大幅提升,进一步提升了棱镜驱动的精准度和可靠性,实现棱镜地摇头。
附图说明
28.图1是本发明提供的外壳立体结构示意图。
29.图2是本发明提供的外壳前侧正视结构示意图。
30.图3是本发明提供的外壳另一视角立体结构示意图。
31.图4是本发明提供的外壳内安装光学部件驱动机构后的结构示意图。
32.图5是本发明提供的电路板立体结构示意图。
33.图6是本发明提供的底座前侧视角立体结构示意图。
34.图7是本发明提供的底座后侧视角立体结构示意图。
35.图8是本发明提供的底座和电路板固定在一起的状态示意图。
36.图9是本发明提供的光学部件驱动机构立体结构示意图。
37.图10是图9爆炸结构示意图。
38.图11是本发明提供的光学部件驱动机构俯视结构示意图。
39.图12是图11中a
‑
a沿线剖视结构示意图。
40.图13是图11中b
‑
b沿线剖视结构示意图。
41.图14是本发明提供的单载体后侧视角结构示意图。
42.图15是本发明提供的单载体前侧视角俯视结构示意图。
43.图16是本发明提供的弹片结构示意图。
44.图17是本发明提供的摄像装置结构示意图。
45.图18是本发明提供的电子设备结构示意图。
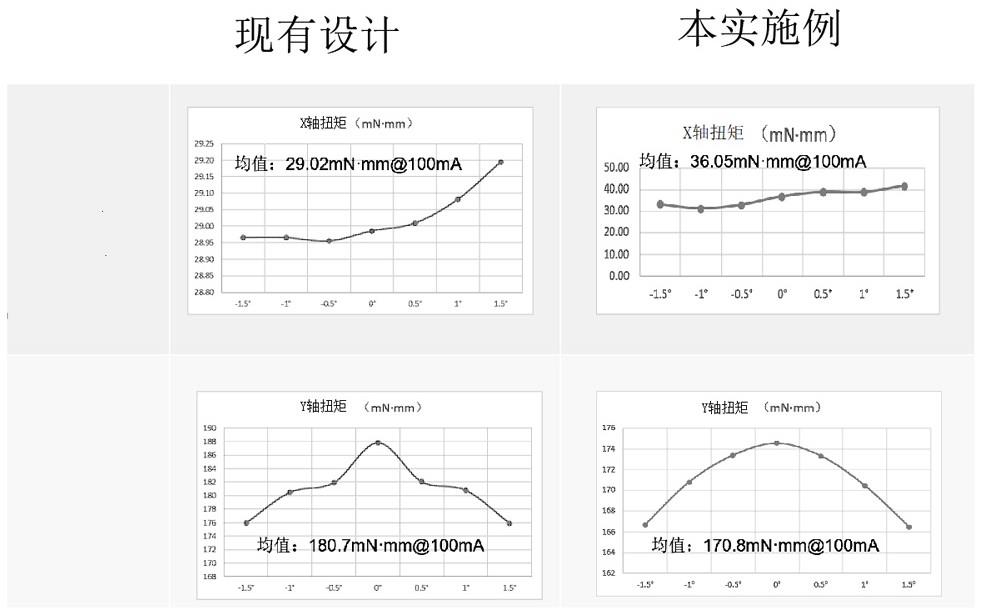
46.图19是本发明提供的现有设计和本实施例扭矩对比曲线图。
47.图20是本发明提供的现有设计和本实施例扭矩对比示意图。
48.图21是本发明提供的现有设计与本实施例各个轴对比数据表。
49.图22是本发明提供的x轴驱动原理示意图。
50.图23是本发明提供的y轴驱动原理结构示意图。
具体实施方式
51.以下是发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
52.实施例一如图4和图9所示,本发明提供了一种光学部件驱动机构l,图中的箭头代表入光和出光方向,利用光学部件驱动机构对棱镜l0进行位置多个方向位置调节,以满足使用要求。
53.具体地,本实施例的光学部件驱动机构l包括外壳1和底座2,在底座2上固定有电路板3,底座2内有单载体容纳空间,单载体4通过弹性支撑机构安装于单载体容纳空间中,本实施例设置电磁驱动机构,即y轴电磁驱动机构,以及倾斜式的x轴电磁驱动机构,以对单载体4进行驱动,协同弹性支撑机构用于矫正光学部件折射光线的偏移。
54.如图9和图10所示,底座2用于固定电路板3,以及承载单载体4。
55.如图5所示,电路板3包括电路中间部30,在电路中间部30的中部区域内部嵌固有加强件,以便于提高电路中间部30的结构强度。
56.在电路板3的一端连接有接电端33,以便于与电源连接。
57.如图5和图12
‑
13所示,电路侧部31有两个并且呈相对分布。电路侧部31其与电路中间部30连接并且用于与y轴线圈6b电连。
58.电路倾斜部32,位于两个电路侧部31之间并且倾斜至电路中间部30的上方。电路倾斜部32用于与倾斜式的x轴线圈6c电连。
59.电路中间部30和电路倾斜部32呈45
°
夹角分布,当然,还可以是其余的锐角角度值。
60.其中一电路侧部31连接在电路中间部30远离接电端33的一端,另外一电路侧部31通过弯折部34连接在电路中间部30的后侧边。这里的弯折部34包括与电路中间部30后侧边连接的向后悬部,连接在向后悬部悬空端并且与向后悬部垂直连接的垂直部,上述电路侧部31连接在垂直部上。
61.利用倾斜设置的电路倾斜部32,其可以使得设置在电路倾斜部32上的x轴线圈6c结合x轴驱动磁石6d实现对单载体4绕x轴旋转,不仅提高了驱动效率,而且还提高了最终的摄像精度。
62.通过弯折部34与电路中间部30连接的所述电路侧部31其悬空在电路中间部30上方。
63.在电路倾斜部32上设有第一销孔320;第一销孔320有若干个并且分布在电路倾斜部32的上侧,即,倾斜表面的上侧。
64.在电路侧部31上设有第二销孔310;在电路中间部30上设有第三销孔300;以及在弯折部34上设有第四销孔340。
65.上述的销孔与底座2上的销进行配合,以实现电路板3的准确定位。
66.另外,电路中间部30和电路倾斜部32通过u形连接部35连接。进一步地,在u形连接部35与电路中间部30的连接处上表面设有台阶槽350,而u形连接部35的厚度小于电路中间部30的厚度并且u形连接部35向后延伸至台阶槽中,以及所述u形连接部35和台阶槽之间间隔分布并且u形连接部35伸入至台阶槽中的部分其上表面不超出电路中间部30的上表面。
设计这种结构其主要是为了便于安装电路板3。
67.优选方案,本实施例的u形连接部35有两个并且间隔分布。以提高结构强度。
68.优选方案,本实施例的两电路侧部31相互平行,以及电路倾斜部32位于两个电路侧部31之间的居中位置。
69.如下对底座2的结构做详细陈述:如图6
‑
8所示,本底座2包括中间承载部20,用于固定电路板3的电路中间部30;中间承载部20的结构呈矩形块状。
70.两个侧端承载部21,连接在中间承载部20上并且间隔分布,两个侧端承载部21分别用于固定与电路中间部30连接的电路侧部31;优选地,两个侧端承载部21分别连接在中间承载部20的两长度方向端部,并且侧端承载部21和中间承载部20呈垂直连接,这种结构其便于加工制造,同时,整体结构强度非常好。
71.两电路侧部31则对应y轴电磁驱动并且两个侧端承载部21呈相对分布。
72.倾斜面220,设置在中间承载部20上并且用于固定与中间承载部20连接的电路倾斜部32。
73.基于本底座2的上述结构,电路倾斜部32则对应倾斜分布的x轴电磁驱动,然后协同y轴电磁驱动,其可以在驱动时使得棱镜l0在调整偏移时具有x轴和y轴同时旋转调整性能,使得调整偏移效率大幅提升,进一步提升了棱镜驱动的精准度和可靠性。
74.优选方案,在本实施例的中间承载部20的中心区域设有倾斜承载部22,倾斜承载部22的后侧表面为上述的倾斜面220。倾斜承载部22的设计其可以对结构底座2的结构形成三角加强,同时,还可以用于固定电路倾斜部32。
75.其次,倾斜承载部22位于两个侧端承载部21之间。优选的,倾斜承载部22位于两个侧端承载部21之间的居中位置,以确保驱动稳定。当然,倾斜承载部22可以处于两个侧端承载部21之间的任意位置,更进一步地,倾斜承载部22的数量还可以是两个,每个倾斜承载部22上分别布置电路倾斜部32和相应的x轴电磁驱动,x轴线圈并联,以进一步提高驱动速度。
76.在倾斜承载部22的中心区域设有x轴线圈避让通孔223。电路倾斜部32上安装有x轴线圈6c,x轴线圈6c置于x轴线圈避让通孔223中,以防止运动干涉以及提高拆装效率。
77.在倾斜面220上设有第一储胶槽221,以及第一定位销222。第一储胶槽221用于固定电路倾斜部32,而在电路倾斜部32上设有供第一定位销222插入的第一销孔320,可以实现稳固固定。
78.在每个侧端承载部21的外表面分别设有内凹定位槽210,内凹定位槽210用于固定上述的电路侧部31。在内凹定位槽210的槽底设有第二定位销211,以及第二储胶槽212。同理,第二储胶槽212中的胶其可以增强与电路侧部31的连接强度,电路侧部31上设有第二销孔310,第二定位销211插入第二销孔,可以实现稳固固定。
79.其次,在每个侧端承载部21上分别设有与相应内凹定位槽210连通的y轴线圈避让通孔213。提高拆装效率,以及起到避让作用。
80.另外,在中间承载部20的底部设有与两个内凹定位槽210连通的底部定位槽200,底部定位槽200用于固定电路中间部30。这种方式其可以便于电路板3的安装,以及对电路板3的保护,防止在底部定位槽200和内凹定位槽210的连通拐角处与外壳1接触导致磨损损坏。上述提到的u形连接部35伸入至台阶槽中的部分其上表面不超出电路中间部30的上表
面,其可以防止电路中间部30凸出于中间承载部20的下表面,以防止电路板3的接触损坏。
81.在中间承载部20的底部前侧设有两个供u形连接部35伸入的避让缺口203,避让缺口和底部定位槽200连通。
82.同样的,如图6
‑
7所示,在底部定位槽200的槽底设有第三定位销201,以及第三储胶槽202。即,第三储胶槽202中的胶其提高与电路中间部30的固定牢度,同时,在电路中间部30上设有第三销孔,以便于第三定位销201的插入定位。
83.还有,在中间承载部20的后侧连接有后支撑部23,倾斜承载部22的上侧与后支撑部23连接,侧端承载部21的后侧与后支撑部23连接,所述中间承载部20、后支撑部23、倾斜承载部22和侧端承载部21合围形成单载体容纳空间,单载体4通过弹性支撑机构安装于单载体容纳空间中。
84.单载体4和底座2之间有两个弹片容纳空间,一个弹片5容纳空间位于单载体的x轴一端和底座的x轴一端之间,另外一个弹片5容纳空间位于单载体的x轴另一端和底座的x轴另一端之间;进一步地,在后支撑部23的后表面和/或顶部设有第四储胶槽230。在侧端承载部21的顶部和/或外表面设有第五储胶槽215。第四储胶槽230和第五储胶槽215中的胶其可以提高与外壳1的连接强度,防止脱落。
85.如图1
‑
4所示,底座2安装于外壳1内,为了提高外壳1和底座2的组装效率,防止相互之间位移,在每个侧端承载部21的前侧分别连接有凸出部214。
86.具体地,上述外壳1包括壳体10,内部有容纳光学部件驱动机构的空腔;壳体10由金属材料制成,例如,钣金材料等等,其具有非常好的刚性,以起到保护和支撑固定等等作用。当然,非金属材料只要能够满足上述的要求也可以应用于本实施例中。
87.光入射口100,设置在壳体10顶侧并且所述空腔连通;光出射口101,设置在壳体10周向并且与光入射口100贯通,光出射口101和所述空腔连通;优选地,本实施例的光入射口100为u形口,而光出射口101也为u形口,两者连通其可以便于外壳加工制造,以及最终棱镜的拆装。
88.功能孔102,设置在壳体10上并且用于限制光学部件驱动机构相对壳体10位移。功能孔102的形状为椭圆孔、方形孔、三角形孔和t形孔中的任意一种或者多种的组合,当然,还可以是其它异形孔,本实施例不对功能孔的形状做过度的举例。
89.也就是说,光学部件驱动机构上有相应的凸出部214能够伸入功能孔102并且与功能孔102匹配,此时的光学部件驱动机构则被预先定位,在后续的后处理加工过程中,受限于功能孔102的限制,光学部件驱动机构则不会发生位移,解决了组装效率低和品质差,以及报废率高等等问题。
90.优选方案,本实施例的功能孔102有两个并且分布在光出射口101的两侧。两个功能孔102其可以提供一个水平面的定位,防止了由于单个孔,特别是单个圆孔的设计而同样出现位移现象,即,当选用圆孔时,圆孔的数量设计为两个。
91.设置在两侧其可以便于光学部件驱动机构的安装,以提高组装效率。
92.优选方案,本实施例的壳体10呈矩形状,当然,也可以是正方形等等其它形状。矩
形状结构其可以尽可能对整体体积进行缩小,以应用于各种摄像装置,例如,手机等等。
93.优选方案,本实施例的光出射口101设置在壳体10周向两相对长周侧面的其中一长周侧面,该长周侧面为前侧面,这种设计其可以优化整个结构的布局,以使得安装有光学部件驱动机构的外壳整体结构更加紧凑合理。
94.其次,其中一个功能孔102设置在所述长周侧面,另外一功能孔102设置在所述长周侧面和与该长周侧面相邻的短周侧面的拐角处。如上的分布方式,其可以使得整体结构更加稳固,即,配合光学部件驱动机构的凸出部后,其可以对外壳周向不同侧面形成加强。
95.具体地,本实施例的壳体10包括相互套接的第一壳体10a和第二壳体10b;以便于光学部件驱动机构的组装。
96.光入射口100设置在第一壳体10a顶部;在第一壳体10a前侧设有与光入射口100连通的第一子口,在第二壳体10b前侧设有与第一子口连通的第二子口,所述第一子口和第二子口形成上述的光出射口101。
97.其次,所述第一壳体10a具有第一敞口;所述第二壳体10b具有与第一敞口相对的第二敞口,敞口设计其可以便于两者的配合连接。
98.另外,上述的功能孔102包括设置在第一敞口上的第一半口,在第二敞口上设有与所述第一半口对应的第二半口,所述第一半口和第二半口形成上述的功能孔102。
99.还有,所述第一壳体10a和第二壳体10b通过局部套接连接结构10c连接在一起,使得第一壳体10a靠近第一敞口一端的局部端面和第二壳体10b靠近第二敞口一端的局部端面呈间隔分布。呈间隔分布其可以防止两者的接触式的对接而导致(由于加工误差) 光学部件驱动机构的凸出部难以伸入功能孔102。
100.因为两个功能孔102中有一个功能孔102是设置在上述长周侧面和与该长周侧面相邻的短周侧面的拐角处,为了能够确保组装效率以及结构的稳定,本实施例的局部套接连接结构10c其为l形局部套接连接结构,并且局部套接连接结构10c位于另外一长周侧面和与该长周侧面相邻的短周侧面的拐角处。具体地,局部套接连接结构10c包括l形套接边100c,l形套接边100c设置在第一壳体10a的第一敞口后侧边和远离拐角处第一半口的第一敞口短侧边,即,第一敞口的口径大于第二敞口。
101.在壳体10长度方向一端设有第一避让孔103,用于供光学部件驱动机构的电路板接电端子伸出,以便于接电连接。第一避让孔103设置在第二壳体10b的一端下侧位置。
102.在壳体10的底部设有第二避让孔104。第二避让孔104设置在第二壳体10b的底部中心位置,起到散热、点胶与底座点胶避让和安装避让等等作用。
103.如图11
‑
13所示,为了能够提高驱动效率以及稳定性,本实施例设置了y轴电磁驱动机构和倾斜式的x轴电磁驱动机构,以对单载体4进行驱动。具体地,如图10
‑
13所示,y轴电磁驱动机构包括设置在单载体4其x轴方向的两块y轴驱动磁石6a,每块y轴驱动磁石6a内表面间隔对应一y轴线圈6b,y轴线圈6b固定在电路板3上。
104.优选地,在单载体4其周向外表面设有两个沿着单载体4其x轴方向设置的y轴安装孔414,每一个y轴安装孔414中固定一块y轴驱动磁石6a。
105.在电路板3的两电路侧部31的相向内表面分别固定有一y轴线圈6b,利用y轴线圈6b通电协同y轴驱动磁石6a,可以使得单载体4绕着y轴进行转动,达到位置调节的目的。
106.具体地,x轴电磁驱动机构包括倾斜式的x轴驱动磁石6d,x轴驱动磁石6d固定在单载体4其中间倾斜部40的后侧倾斜面上,在电路板3的电路倾斜部32上设有倾斜式的x轴线圈6c,x轴线圈6c固定在电路倾斜部32的倾斜表面,x轴驱动磁石6d伸入x轴线圈6c中。后侧倾斜面和电路倾斜部32的倾斜表面平行。
107.x轴线圈6c的轴心线和倾斜表面垂直。
108.两块y轴驱动磁石位于两个y轴线圈之间。
109.所述x轴驱动磁石6d的轴心线和x轴线圈6c的轴心线重合,以确保驱动稳定性。
110.所述x轴驱动磁石6d轴心线向入射光轴rs延长并与入射光轴相交,两者形成钝角夹角rs0。因为x轴驱动磁石6d轴心线和x轴线圈6c的轴心线重合,也就是x轴线圈6c的轴心线和入射光轴rs同样形成钝角夹角,本实施例的钝角夹角rs0为135
°
。两种电磁驱动方式的结合协同弹性支撑机构其可以缩小x/y轴方向姿势差。入射光轴rs为棱镜入射光轴。
111.如下对单载体4的结构做进一步陈述:如图12
‑
15所示,单载体4的结构包括中间倾斜部40,用于固定倾斜方向与中间倾斜部40倾斜方向一致的x轴驱动磁石6d。x轴驱动磁石6d协同上述电路倾斜部32上的x轴线圈6c,可以使得单载体4绕x轴旋转,实现角度调整,大幅提高了调节效率以及调节精度。
112.侧向定位部41,有两个并且呈相对分布,两个侧向定位部41连接在中间倾斜部40的两端,使得侧向定位部41和中间倾斜部40内部形成光学部件容纳空间,光学部件例如棱镜l0。
113.优选地,中间倾斜部40的后侧倾斜面用于固定x轴驱动磁石6d,进一步地,在中间倾斜部40的后侧倾斜面设有倾斜定位孔410,其用于固定x轴驱动磁石6d。进一步地,在中间倾斜部40的后侧倾斜面设有向后凸起的倾斜凸起411,倾斜凸起411上设有上述的倾斜定位孔410,倾斜定位孔410的轴心线和x轴驱动磁石6d的轴心线重合,倾斜定位孔410的轴心线向入射光轴rs延长并与入射光轴相交,两者形成钝角夹角rs0。
114.在倾斜定位孔410的孔底设有底部储胶槽412,以提高与x轴驱动磁石6d的连接牢固度。
115.其次,在倾斜定位孔410的孔壁上设有若干沿着倾斜定位孔410轴向设置的接触凸起413,这种结构其显然缩小了与x轴驱动磁石6d的接触面,以提高x轴驱动磁石6d的安装效率。
116.优选地,上述的倾斜定位孔410为矩形孔。
117.在每个侧向定位部41的外表面分别设有用于安装y轴驱动磁石6a的y轴安装孔414,y轴驱动磁石6a安装于y轴安装孔414中后其协同y轴线圈6b能够实现对单载体4的y轴位置驱动。
118.如图9
‑
10所示,弹性支撑机构还包括两片弹片5,其中一弹片置于一个弹片容纳空间中并且分别与单载体和底座连接,另一片置于另外一个弹片5容纳空间中并且分别与单载体和底座连接.所述两片弹片5沿着光学部件其入射光轴方向分布,优选地,所述两片弹片5处于同一个沿着入射光轴rs方向的纵向面上,所述纵向面与入射光轴rs间隔分布,或者所述入射光轴rs位于纵向面上,可以依据实际的重心位置进行设定弹片位置。两片弹片5以入射光轴rs呈对称分布。以起到对称弹性支撑作用。
119.另外,如图14
‑
15所示,一个弹片容纳空间中设置有一个弹片固定部415,弹片固定部415固定在单载体4上并且每个弹片容纳空间中相应弹片的接触部连接在弹片固定部上,该弹片5的底座连接部与底座连接。在单载体4的每个侧向定位部41上还设有用于使得弹片5沿着入射光轴rs方向设置的上述弹片固定部415,两个弹片固定部415以入射光轴呈对称分布。
120.每个弹片固定部415固定的一弹片5,两弹片5处于同一个沿着入射光轴rs方向的纵向面上,并且每一弹片5分别与底座2连接,即,两弹片5其呈纵向设置并支撑所述单载体4。这种方式其可以实现双轴转动,以及使得x/y轴方向姿势差非常小,同时,x/y轴共用载体,可有效解决fra(晃动)不良问题。
121.优选地,本实施例的弹片固定部415包括沿着入射光轴rs方向设置的纵向固定平面415a,两个纵向固定平面415a处于同一个沿着入射光轴rs方向的纵向面上。
122.其次,在每个纵向固定平面415a上分别设有定位柱415b,以便于弹片5的精准定位固定,纵向固定平面415a和定位柱415b呈垂直连接。
123.所述纵向固定平面415a处于相应侧向定位部41的纵向等分面上或者居中位置。
124.另外,在每个侧向定位部41的外表面后侧分别设有外凸台416,在每个外凸台416远离侧向定位部41的外表面分别设有上述的y轴安装孔414。两个外凸台416呈对称分布。
125.同时,为了提高安装精准度以及安装效率,所述y轴驱动磁石6a和侧向定位部41之间设有磁石定向安装结构。
126.具体地,作为第一种方案,该磁石定向安装结构包括:y轴安装孔414,有两个并且分别设置在单载体4的x轴两端;y轴驱动磁石6a,有两块并且一一固定于上述的y轴安装孔414中;定向缺口414a,有两个并且分别设于所述y轴安装孔孔壁;定向凸起60a,有两个并且一一卡于所述定向缺口414a中,每块y轴驱动磁石外缘连接一定向凸起。
127.即,在每个y轴安装孔414孔壁上设有定向缺口414a,在y轴驱动磁石6a的周向设有卡入定向缺口414a的定向凸起60a。
128.优选地,在每块y轴驱动磁石6a的内表面设有内连接块61a,所述定向凸起60a设置在内连接块61a的周向一侧边。
129.在y轴安装孔414的孔底设有y轴储胶槽414b,内连接块61a通过填充在y轴储胶槽414b中的胶固定在y轴安装孔414内,同时,y轴驱动磁石6a和内连接块61a采用胶连接等等固定方式。除了定向凸起60a位置,y轴驱动磁石6a的周向侧边和内连接块61a的周向侧边齐平,以便于安装固定。
130.在y轴安装孔414的孔壁上设有若干沿着y轴安装孔414轴向设置的内凸起筋414c,其可以缩小与y轴驱动磁石6a和内连接块61a的接触面,提高安装效率,当然,还可以在相邻两内凸起筋之间形成的槽中添加胶以进一步提高y轴驱动磁石6a固定牢度。
131.两个y轴安装孔414孔壁上的定向缺口414a呈对称设置或者呈前后错位分布。
132.作为第二种方案:磁石定向安装结构包括:y轴安装孔414,有两个并且分别设置在单载体的x轴两端;y轴驱动磁石6a,有两块并且一一固定于上述的y轴安装孔中;
定向缺口414a,有两个并且分别设于y轴驱动磁石外缘;定向凸起60a,有两个并且一一卡于所述定向缺口中,每个y轴安装孔孔壁连接一定向凸起。
133.作为第三种方案,磁石定向安装结构包括:y轴安装孔,有两个并且分别设置在单载体的x轴两端;y轴驱动磁石,有两块并且一一固定于上述的y轴安装孔中;定向缺口,有两个,其中一个定向缺口设置在其中一个y轴安装孔孔壁,另外一个定向缺口设置在其中一块y轴驱动磁石外缘;定向凸起,有两个,其中一个定向凸起设置在另外一个y轴安装孔孔壁,另外一个定向凸起设置在另外一个y轴安装孔孔壁;所述的定向凸起卡入相应的定向缺口中。
134.在外凸台416的前侧面和侧向定位部41的连接处设有定位凸台417,上述的纵向固定平面415a设置在定位凸台417的前侧面,定位凸台417起到悬空作用,防止弹片5与单载体4接触。
135.定位凸台417位于外凸台416的前侧面的居中位置,可确保重心平衡。
136.具体地,如图16所示,每一弹片5的结构包括:接触部50,接触部服帖固定在纵向固定平面上与纵向固定平面415a吻合接触,在接触部50上设有供定位柱415b插入的柱孔500,定位柱415b插入柱孔500中,实现预定位。
137.上腕部51,其一端连接在接触部50上侧边;下腕部52,其一端连接在接触部50下侧边;所述的上腕部51和下腕部52呈对称分布。
138.底座连接部53,分别与上腕部51的另一端连接,以及下腕部52的另一端连接,底座连接部53与底座2连接。
139.具体地,上腕部51包括具有上l形外形变空间510的上中间部511,上中间部511的一端通过上纵向部512与接触部50上侧边连接,上中间部511的另一端通过上横向部513与底座连接部53的上端连接。
140.下腕部52包括具有下l形外形变空间520的下中间部521,下中间部521的一端通过下纵向部522与接触部50下侧边连接,下中间部521的另一端通过下横向部523与底座连接部53的下端连接。所述的上中间部511和下中间部521呈对称分布,所述的上纵向部512和下纵向部522位于同一直线上,所述的上横向部513和下横向部523相互平行。
141.所述的接触部50、上腕部51、下腕部52和底座连接部53合围内部形成中间小两端大的内闭合形变空间54。
142.上l形外形变空间510和下l形外形变空间520呈对称分布。
143.利用沿着入射光轴rs方向设置的两弹片5,协同倾斜式的x轴电磁驱动机构和y轴电磁驱动机构,可以实现对单载体4的双轴位置旋转调节,双轴即x轴和y轴,以及使得x/y轴方向姿势差非常小,同时,x/y轴共用载体,可有效解决fra(晃动)不良问题。
144.其次,如图6所示,在底座2上设有安装纵向面216,安装纵向面216有两处,具体地,在底座2的每一侧端承载部21的前侧表面分别设有用于安装底座连接部53的上述安装纵向面216,在安装纵向面216的下端设有下柱销217,在底座连接部53的下端连接有柱销孔体
530,底座连接部53服帖在安装纵向面216上,下柱销217插于柱销孔体530中。
145.另外,如图9所示,在侧向定位部41的内表面设有纵向槽体418和/或横向槽体419,其用于减轻重量,以及便于棱镜l0安装。其次,在中间倾斜部40的前倾斜表面两侧分别设有倾斜方向与中间倾斜部40倾斜方向一致的倾斜凸筋400,倾斜凸筋400和相应的侧向定位部41的内表面形成倾斜储胶槽体401,棱镜l0放置在倾斜凸筋400上并且利用倾斜储胶槽体401中的胶使得棱镜l0固定在中间倾斜部40上。
146.中间倾斜部40其前倾斜表面的每一侧分别设有两倾斜凸筋400,并且同一侧的两倾斜凸筋400呈对称分布。
147.为了使得运行更加可靠,本实施例还设置了运动限制结构。具体地,所述运动限制结构为x、y和z三个方向的限制结构,如图9和图14
‑
15所示,z方向限制结构设置在载体的z轴方向两端,其包括设置在单载体4后侧表面的z轴后侧限制凸块2b,在单载体4的前侧设置有z轴弹性层或者z轴前侧限制凸块2c,z轴后侧限制凸块2b其可以起到极限单载体4向后运动与底座2接触形成保护,z轴弹性层或者z轴前侧限制凸块2c可以起到单载体4向前极限运动与外壳1内壁接触形成保护。
148.x方向限制结构设置在载体的x轴方向两端,其包括在单载体4两对称外表面的x轴外凸限制块4a。x方向限制结构可以对单载体4沿着y轴极限运动后与底座2接触形成保护。
149.y方向限制结构设置在载体的y轴方向两端,其包括设置在单载体4顶部的y轴上凸限制块4b,y轴上凸限制块4b其可以在单载体4在x轴运动后与外壳1接触形成保护。
150.所述z轴后侧限制凸块2b设置在单载体4后侧表面顶侧。
151.所述z轴弹性层或者z轴前侧限制凸块2c设置在单载体4前侧面的上侧和/或下侧位置。
152.所述的y轴上凸限制块4b设置在单载体4其u形顶面的两端。
153.上述的限制结构其可以确保xy轴电磁驱动机构使用稳定性,以及确保使用寿命,避免单载体撞击导致损坏。
154.为了能够使得单载体4运行位置更加精准,本实施例设置了位置检测机构,如图10和12
‑
13所示,其包括设置在第一位置检测机构和倾斜式位置检测机构,具体地,第一位置检测机构包括设置在至少一电路侧部31上的第一位置传感器4c,第一位置传感器4c位于y轴线圈6b内,并且第一位置传感器4c与该y轴线圈6b间隔分布的y轴驱动磁石6a留有间距,以检测与y轴驱动磁石6a连接的单载体4其位置。
155.所述的倾斜式位置检测机构包括设置在电路倾斜部32上的倾斜式的位置传感器4d,倾斜式的位置传感器4d与倾斜式的x轴驱动磁石6d间隔分布,以检测与x轴驱动磁石6d连接的单载体4位置。
156.优选地,本实施例的第一位置传感器4c和位置传感器4d均为霍尔传感器。
157.其次,所述的位置传感器4d固定在电路倾斜部32的后侧倾斜面上。位置传感器4d和第一位置传感器4c进行闭环反馈控制。
158.如图19所示,从曲线图上可以看出,本实施例的x轴扭矩曲线更加稳定,即,单载体在绕x轴转动至不同位置时,其x轴扭矩输出趋向更小差的扭矩区间,也就可以说明,本实施例的弹片设计其可以在一个稳定的扭矩区间范围内即可驱动单载体4绕x轴运动,以便于对单载体的稳定转动控制。相反,从图19中可以看出,现有技术其x轴扭矩处于一个较大落差
的区间范围内,其不便于对单载体的稳定转动控制。
159.工作原理如下:电路板3通电则给x轴线圈6c和y轴线圈6b供电;如图22
‑
23所示,x轴转动:x轴线圈6c通电后则和x轴驱动磁石6d(以单极磁石为例)产生电磁推力,即,第一电磁推力xf1和第二电磁推力xf2,第一电磁推力xf1和第二电磁推力xf2方向相反,也就可以驱动单载体绕x轴逆时针旋转或者顺时针(改变电流方向)旋转。
160.受限于两弹片5以及第一电磁推力xf1和第二电磁推力xf2共同作用使得单载体4绕x轴相对于两弹片5旋转,即,可以带动单载体4上的棱镜绕x轴相对于底座2旋转。
161.y轴转动:一个y轴线圈6b相对一个y轴驱动磁石6a,分布在单载体4两端的y轴线圈6b在连通电源时但是两个y轴线圈6b的相位相反,即,其中一个y轴线圈6b和与其相对的y轴驱动磁石6a产生沿着z轴方向分布的第一洛伦磁力y
‑
fv1,另外一个y轴线圈6b和与其相对的y轴驱动磁石6a产生沿着z轴方向分布的第二洛伦磁力y
‑
fv2,第一洛伦磁力y
‑
fv1和第二洛伦磁力y
‑
fv2方向相反,此时的单载体4绕y轴相对于两弹片5旋转,即,可以带动单载体4上的棱镜绕y轴相对于底座2旋转。
162.上述的驱动实现单载体4绕x轴和y轴同时运动。
163.x轴电磁驱动和y轴电磁驱动共用一转动中心(即,单载体4),协同两弹片5的设计实现单载体4的双轴转动,以及使得在x/y方向受控转动,这种设计其可以使得x/y轴方向姿势差非常小,见附图20
‑
21。
164.附图20其对比可以得出,本实施例其x推力更小,而y轴推力更加稳定。
165.实施例二在上述实施例一的基础上,如图17所示,本发明还提供了一种摄像装置,具有如上实施例一所述的光学部件驱动机构l,以及透镜驱动机构t,透镜驱动机构t位于光出射口101处,利用光学部件驱动机构l改变光路,以及透镜驱动机构t进行协同作用,可以实现高精度超清晰摄像作业。
166.实施例三在上述实施例二的基础上,如图18所示,本发明还提供了一种电子设备,例如手机,具有如实施例二所述的摄像装置。
167.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1