光学系统的制作方法
1.本实用新型涉及一种光学系统,特别涉及一种透镜数较多、具有各种机构的照相机的机构。
背景技术:
2.作为照相机的一例,能够列举出数码相机等产品。近年来,随着针对数码相机用摄像光学系统等越来越要求高性能化,数码相机中的透镜的构成枚数也随之增加,此外,除了针对照相机的高性能化,还要求自动对焦、光圈自动调整、防振等更多的功能,即,追求高性能且多功能的照相机。
技术实现要素:
3.实用新型要解决的问题
4.但是,随着透镜数量、各种功能机构的增加,照相机的机构整体变得复杂,存在组装性下降、难以将各种构件、机构、透镜等高精度地组装起来的问题,若无法将各透镜、机构等高精度地组装,则存在无法发挥其高性能的可能性。因此,提供一种在满足上述要求的同时能够高精度地组装且组装性优异的构造是极为重要的。
5.本实用新型鉴于上述情况提供一种能够满足高性能、多功能的要求,且构造极为简单、组装性良好,从而能够基于高精度的组装来实现高性能的照相机的机构。
6.用于解决问题的方案
7.为了解决上述课题,本实用新型提供一种光学系统,该光学系统具有如下结构(1)~结构(7)。
8.(1)一种光学系统,其分解为至少三个单元,该至少三个单元中包括主要的光学单元、其他光学单元和传感器部,全部的所述其他光学单元以及传感器部直接结合于所述主要的光学单元,所述主要的光学单元包括内置有透镜的透镜室,所述其他光学单元的至少一部分是包括内置有透镜的透镜室的光学单元。
9.(2)在上述结构(1)的基础上,所述主要的光学单元为所述光学系统的后组,所述其他光学单元的所述光学单元为所述光学系统的前组。
10.(3)在上述结构(2)的基础上,不仅所述其他光学单元,所述光学系统的主要的机构部也直接结合于所述主要的光学单元。
11.(4)在上述结构(3)的基础上,所述主要的机构部为焦点调节部,其具有至少一个光学透镜,能够相对于所述主要的光学单元相对移动。
12.(5)在上述结构(3)的基础上,所述主要的机构部为光圈调整装置,其被夹在作为前组的所述其他光学单元和作为后组的所述主要的光学单元之间。
13.(6)在上述结构(4)的基础上,并列地具有对所述焦点调节部进行保持的机构保持部、对所述传感器部进行保持的传感器保持部。
14.(7)在上述结构(5)的基础上,并列地具有对所述光圈调整装置进行保持的机构保
持部、对所述其他光学单元进行保持的光学保持部。
15.实用新型的效果
16.如以上所述那样,通过将光学系统的构成要素直接结合于单一的构成要素,从而能够得到高精度、高性能的光学系统。而且,通过使各单元独立,能够针对各单元独立地进行组装作业,使得组装作业、维护变得极为容易。
附图说明
17.图1是实施例的摄像光学系统在分解状态下的立体结构图。
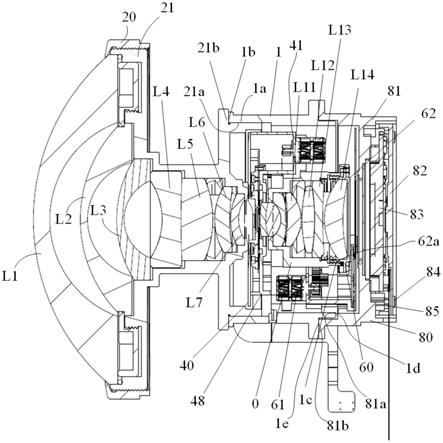
18.图2是实施例的摄像光学系统的截面图。
19.图3是在实施例的摄像光学系统的截面图中将各单元分离并说明各单元的关系的说明图。
20.图4是光圈单元40的主视图。
21.图5是聚焦单元60的主视图。
22.附图标记说明
23.20、前组单元、40、光圈单元、0、后组单元、60、聚焦单元、80、传感器单元、21、前组透镜室、1、后组透镜室、1a、1b、21a、21b、卡合部、1d、1e、81a、81b、卡合部、l1~l14、透镜、61、聚焦马达、62、透镜框、 62a、1c、螺纹部、81、传感器保持件、82、传感器基板、83、传感器、84、传感器基板调整螺纹部、85、传感器基板按压弹簧、47、67、螺钉、41、光圈马达、42、齿轮组、43、光圈驱动凸轮、43、突起部、44、光圈叶片、46、 pi、62b、齿轮、48、基板、63、标识板、64、pi、65、马达齿轮、66、聚焦齿轮组。
具体实施方式
24.以下参照附图,进一步详细地说明本实用新型的照相机的机构的实施方式。
25.在图1中示出了本实用新型的摄像光学系统的典型例。在图1中,将光学系统分解成多个单元地进行图示,这些单元至少包括作为前组单元20的光学单元、作为后组单元0的光学单元以及传感器单元80。后组单元0作为主要的光学单元,前组单元20作为其他光学单元的至少一部分,也可以根据需要追加前组单元20之外的单元作为其他光学单元。摄像光学系统中的单元不限于上述单元,能够根据需要适当追加其他单元。具体而言,图1中沿光学轴向依次具有前组单元20、光圈单元40、后组单元0、聚焦单元60、传感器单元 80。
26.在图2中示出了实施例的摄影光学系统的截面图。作为前组单元20的光学单元包括前组透镜室21,前组透镜室21内置有多个透镜l1~l7。透镜的种类和数量并不特别限定,能够根据实际情况进行变更。光圈单元40与前组单元20相邻地配置,光圈单元40具有光圈马达41,通过光圈马达41的旋转驱动,能够使光圈半径发生变化。
27.后组单元0以将光圈单元40夹在前组单元20和后组单元0之间的方式配置,后组单元0包括后组透镜室1,后组透镜室1内置有多个透镜l8~l13。透镜的种类和数量并不特别限定,能够根据实际情况进行变更。
28.为了确保光学性能,要求的精度极高,例如,需要将前组单元中的透镜和后组单元中的透镜之间的偏心量控制在5μm,将倾斜角度控制在30秒以内等,若无法确保精度,则无法发挥出光学系统的性能。
29.作为确保精度的手段之一,如图2所示,后组单元0的后组透镜室1沿光学轴向延伸,在靠近前组单元20的一侧的内周壁具有卡合部1a,在后组透镜室1的靠前组单元20侧的端面的局部具有卡合部1b。在前组单元20的靠后组单元0侧的端部具有筒状部和自筒状部突出的凸缘部。该筒状部的外周面与后组透镜室1的内周部相接合,该筒状部的与卡合部1a相对应的部位具有卡合部21a。该凸缘部与后组透镜室1的靠前组单元20侧的端面相抵接,且在与卡合部1b相对应的部位具有卡合部21b。通过这些卡合部,能够可靠地保证前组单元20、后组单元0的组合精度。
30.在本技术实施例的照相机中,还具有聚焦单元60,该聚焦单元60具有聚焦马达61以及透镜框62。该聚焦马达61内置于聚焦单元60,透镜框62保持透镜l14,进而使得透镜l14能够旋转、沿光轴方向移动。通过该聚焦马达61 的驱动,能够使得透镜框62所保持的透镜l14移动。聚焦单元60中保持的透镜并不限于透镜l14,还可以在保持透镜l14之外,还保持其他透镜。
31.该透镜框62具有螺纹部62a,该后组透镜室1具有与卡合部1a、1b相同的卡合部1d、1e。该卡合部1d、1e与卡合部1a、1b一体形成于后组透镜室1上。后组透镜室1在与螺纹部62a对应的位置具有螺纹部1c,通过螺纹部1c与螺纹部62a螺纹结合,从而使后组透镜室1与透镜框62彼此卡合。
32.当聚焦马达61驱动时,带动透镜框62旋转,通过螺纹部62a与螺纹部1c 之间的螺纹结合,将透镜框62的旋转转换为沿光轴方向的移动,由此,使透镜l14沿光轴方向移动,进行焦点调节。
33.通过上述结构,将前组单元20和后组单元0高精度地组合起来,并且,针对聚焦单元60同样将其卡合于后组单元0的后组透镜室1,由此,能够以后组单元中的透镜组l8~l13为基准,保证前组单元中的透镜组l1~l7和聚焦透镜l14的光轴精度。
34.光圈马达41和聚焦马达61分别与光轴平行,但两者的输出轴的方向相反,以夹着后组透镜室1的方式设置于对称位置,由此,能够设置于较小的空间,实现镜筒的小型化。
35.更进一步说,如图2所示那样,照相机的机构中还具有传感器单元80,该传感器单元80具有传感器保持件81、传感器基板82、传感器83、传感器基板调整螺纹部84以及传感器基板按压弹簧85。作为传感器,并不特别限定,例如可以列举cmos、ccd等传感器的元件,利用透镜l1~l14,在传感器83 上成像。传感器基板调整螺纹部84用于调整传感器基板82的倾斜度。
36.作为确保精度的手段之一,如图2所示,后组单元0的后组透镜室1沿光学轴向延伸,在靠近传感器单元80的一侧的外周壁具有卡合部1d,在后组透镜室1的靠传感器单元80侧的端面的局部具有卡合部1e。在传感器单元80的靠后组单元0侧的端部具有筒状部和自筒状部突出的凸缘部。该筒状部的内周面与后组透镜室1的外周部相接合,该筒状部的与卡合部1d相对应的部位具有卡合部81a。该凸缘部与后组透镜室1的靠传感器单元80侧的端面相抵接,且在与卡合部1e相对应的部位具有卡合部81b。通过这些卡合部,能够可靠地保证传感器单元80、后组单元0的组合精度。
37.在图3中,以截面图的形式将各单元分离地示出,如图3所示,利用多个螺钉47(图示中为3个)将光圈单元40紧固固定于后组透镜室1,利用多个螺钉67(图示中为4个)将聚焦单元60紧固固定于后组透镜室1,像这样,通过不仅使与成像具有直接关系的前组单元20、
传感器单元80直接卡合于后组单元0,还使与成像无直接关联的光圈单元40、聚焦单元60也直接结合于后组单元0,从而能够以极高的程度保证上述单元彼此之间的精度。在设置有前组单元20之外的单元作为其他光学单元的情况下,该单元同样直接卡合于作为主要的光学单元的后组单元0,从而保证其精度。
38.在图4中示出了光圈单元40的主视图。如上所述,光圈单元40具有光圈马达41,该光圈马达41能够驱动光圈叶片,如图4所示,在光圈马达41附近设有齿轮组42,光圈马达41的输出轴上设有一个传动齿轮,该齿轮与齿轮组 42中的一个齿轮相啮合,从而能够将光圈马达41的驱动力传递给齿轮组42,齿轮组42中的另一个齿轮与在光圈驱动凸轮43的外周设置的齿相啮合,从而齿轮组42能够将驱动力传递给光圈驱动凸轮43,使光圈驱动凸轮43随着光圈马达41的驱动而绕光轴中心旋转。当光圈驱动凸轮43旋转时,会驱动光圈叶片44、全闭叶片45,从而调整光圈值。光圈叶片44具有5个,其中一个为全闭叶片45,通过该全闭叶片45,能够将光圈设为全闭状态。在光圈驱动凸轮 43设有局部突起部43a,pi(photo interrupter)46用于检测光圈驱动凸轮43 的旋转基准位置,并控制其旋转量。pi46基于突起部43a的进出来检测光圈驱动凸轮43的位置。
39.在图5中示出了聚焦单元60的主视图。如上所述,聚焦单元60具有聚焦马达61,保持透镜l14的透镜框62具有螺纹部62a,该透镜框62进行透镜l14 的旋转、沿光轴方向的移动。在透镜框62一体地设有齿62b。表示透镜框62 的旋转位置的标识板63能够相对于透镜框62相对地移动。pi64能够检测标识板63的位置。通过在聚焦马达61上设置的齿轮65,将聚焦马达61的驱动力传递至聚焦齿轮组66中的一个齿轮,聚焦齿轮组66中的另一个齿轮与透镜框62 的外周的齿62b相啮合。
40.如上所述,本技术的各机构均直接结合于后组单元0,因此,能够以高精度组装各机构,通过以高精度进行组装,能够获得高性能的光学系统。
41.前组单元20、光圈单元40均位于后组单元0的拍摄对象侧(附图的左侧),通过使前组单元20、光圈单元40的相对于后组单元0的固定位置与光轴之间的距离不同,能够使前组单元20、光圈单元40均与后组单元0直接结合,从而保证了高精度。由此,将前组单元20、光圈单元40并列地固定。而且,如图2所示,作为保持光圈单元40的保持部即基板48与保持前组单元20的前组透镜室21并列。
42.聚焦单元60、传感器单元80均位于后组单元0的像侧(附图的右侧),同样地,通过使聚焦单元60、传感器单元80的相对于后组单元0的固定位置与光轴之间的距离不同,能够使聚焦单元60、传感器单元80均与后组单元0直接结合,从而保证了高精度。由此,将聚焦单元60、传感器单元80并列地固定。而且,如图2所示,作为保持聚焦单元60的保持部即透镜框62与保持传感器单元80的传感器保持件81并列。在设置有前组单元20之外的单元作为其他光学单元的情况下,针对该其他光学单元,也能够通过使其固定位置与光轴之间的距离不同于其他单元,来使其直接结合于后组单元0,且其保持件也与其他单元的保持件并列。
43.而且,各机构之间彼此独立,方便单独地进行组装作业、维护作业,因此,能够获得较高的组装性。此外,由于聚焦马达61、光圈马达41、位置检测pi汇总地设置于后组单元0,因此,还能够获得电布线简单的效果。
44.而且,后组单元0的与其他单元结合的结合部分,例如,卡合部1a、1b、卡合部1d、1e、螺纹部1c、供螺钉47贯穿的螺纹孔、供螺钉67贯穿的螺纹孔均一体地设于后组单元0的
后组透镜室1这一单一构件,因此,能够保证结合部分彼此之间的位置精度。
45.在本实施例中,以用于鱼眼透镜的实施进行了例示,但只要是能够分为三个四个或五个以上的单元的光学系统,就也能够基于同样的技术思想将各单元直接结合。此外,即使是沿相同方向结合的单元,也能够通过变更结合部位相对于光轴的距离,来平行地进行直接结合,从而获得整体上极其高精度的单元乃至光学系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1