一种透镜系统、采集模组及飞行时间相机的制作方法
1.本实用新型涉及光学及电子技术领域,特别涉及一种透镜系统、采集模组及飞行时间相机。
背景技术:
2.近年来,扫地机器人和智能电风扇等智能设备走进了越来越多的家庭,其中,高端的扫地机器人配备vslam(visual simultaneous localization and mapping,视觉导航)+tof(time-of-flight,飞行时间)技术,可极大提升扫地机器人的定位精准性。tof相机是通过计算光线发射反射时间差或相位差来换算被拍摄物体的距离,以产生深度信息的相机装置。为了更好地提高扫地机器人等智能设备对场景建模的效率,以及tof相机的精准度,迫切需求一种超广角、大光圈的透镜系统。
技术实现要素:
3.针对上述问题,本实用新型的目的在于提供一种透镜系统、采集模组及飞行时间相机,透镜系统具有超广角、大光圈的特性,满足tof相机进行房间级场景大视场、高精度建模的应用需求。
4.为解决上述技术问题,本实用新型的实施方式提供了一种透镜系统,包括从物面到像面依次设置的:
5.第一透镜,具有负光焦度,所述第一透镜朝向所述物面的表面为凸面,所述第一透镜朝向所述像面的表面为凹面;
6.第二透镜,具有负光焦度,所述第二透镜朝向所述物面的表面为凹面,所述第二透镜朝向所述像面的表面为凸面;
7.第三透镜,具有正光焦度,所述第三透镜朝向所述物面的表面为凸面,所述第三透镜朝向所述像面的表面为凹面;
8.第四透镜,具有正光焦度,所述第四透镜朝向所述物面的表面为凸面,所述第四透镜朝向所述像面的表面为凹面;
9.第五透镜,具有正光焦度,所述第五透镜朝向所述物面的表面为凸面,所述第五透镜朝向所述像面的表面为凹面。
10.在一个实施例中,所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜以及所述第五透镜均为塑料材质。
11.在一个实施例中,所述透镜系统的光圈值fno满足如下条件:fno≤1.2。
12.在一个实施例中,所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜以及所述第五透镜满足如下条件:
13.-5.0<f1<0;
14.-20.0<f2<0;
15.5.0<f3<15.0;
16.3.0<f4<10.0;
17.0<f5<12.0;
18.其中,f1为所述第一透镜的有效焦距,f2为所述第二透镜的有效焦距,f3 为所述第三透镜的有效焦距,f4为所述第四透镜的有效焦距,f5为所述第五透镜的有效焦距。
19.在一个实施例中,所述透镜系统满足如下条件:
20.1.52<nd<1.95;
21.0.1<f/tl<0.6;
22.0.3<h<2.0;
23.0.25<h’<2.0;
24.其中,f为透镜系统的有效焦距,nd为透镜材料在d线的折射率,tl为所述第一透镜朝向所述物面的表面至所述像面的轴上距离;h为所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜以及所述第五透镜的镜片的中心厚度,h’为所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜以及所述第五透镜的镜片的边缘厚度。
25.在一个实施例中,还包括孔径光阑,所述孔径光阑设置于所述第一透镜朝向所述物面一侧、所述第一透镜与所述第二透镜之间、所述第二透镜与所述第三透镜之间、所述第三透镜与所述第四透镜之间或者所述第四透镜与所述第五透镜之间。
26.在一个实施例中,所述第一透镜、所述第二透镜、所述第三透镜、所述第四透镜以及所述第五透镜均为非球面透镜。
27.本实用新型还提供一种采集模组,包括如上任一项所述的透镜系统。
28.在一个实施例中,采集模组还包括飞行时间传感器。
29.本实用新型还提供一种飞行时间相机,包括如上任一项所述的采集模组。
30.本实用新型的有益效果在于:本实用新型的透镜系统通过设置的第一透镜、第二透镜、第三透镜、第四透镜以及第五透镜,能够获得较大的视场角,具有超广角、大光圈的特性,满足tof相机进行房间级场景大视场、高精度建模的应用需求,结合超广角散斑发射模组还可实现散斑畸变校正的效果。
附图说明
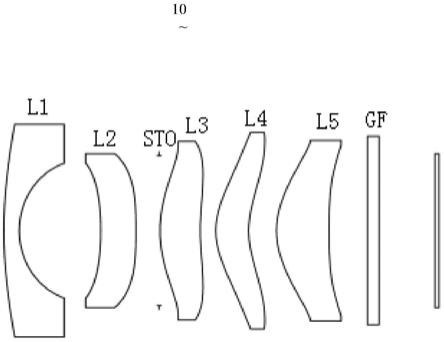
31.图1是本实用新型第一实施例中透镜系统的结构示意图;
32.图2是本实用新型第一实施例中透镜系统的调制传递函数的示意图;
33.图3是本实用新型第一实施例中透镜系统的视场相对照度的示意图;
34.图4是本实用新型第一实施例中透镜系统的场曲及畸变示意图;
35.图5是本实用新型第一实施例中飞行时间相机的结构示意图;
36.图6是本实用新型第一实施例中透镜系统的光路示意图;
37.图7是本实用新型第二实施例中投影透镜系统的光路示意图;
38.图8是本实用新型第二实施例中投影模组和采集模组的畸变网格图;
39.图9是本实用新型第二实施例中投影模组投射散斑和采集模组接收散斑示意图;
40.图10是本实用新型第二实施例中投影模组投射散斑在具体应用场景的示意图;
41.图11是本实用新型第二实施例中采集模组接收散斑在具体应用场景的示意图。
42.在附图中,各附图标记表示:
43.10、透镜系统;20、飞行时间传感器;100、投影模组;200、采集模组; 300、处理器;l1、第一透镜;l2、第二透镜;l3、第三透镜;l4、第四透镜; l5、第五透镜;l6、第六透镜;gf、过滤片;sto、孔径光阑;40、投影透镜系统。
具体实施方式
44.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本实用新型而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本实用新型所要求保护的技术方案。
45.实施例一:
46.请参阅图5,本实施例提供了一种飞行时间相机,飞行时间相机主要组成部件有投影模组100、采集模组200、以及处理器300。投影模组100、采集模组200一般以一定的基线距离安装在支架上。
47.投影模组100包括投射光源,投射光源可采用多灯的方式增大视场范围或提高光场均匀性。投射光源为红外激光光源,如850nm或940nm波段,投射光源为泛光,采集模组200为对应的波段的红外相机。利用处理器300获取深度图像具体是指由采集模组200的像素采集到光源发出的光信号后,该信号能量携带光的飞行时间信息,通过计算光由投射模组100经目标反射,再到采集模组200对应像素的飞行时间数值,就可以得到深度图像。采集模组200包括飞行时间传感器20以及透镜系统10,透镜系统10用于接收目标的反射光并汇聚到飞行时间传感器。
48.请参阅图1和图6,本实用新型提供了一种透镜系统10,该透镜系统10 包括从物面到像面依次设置的第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4以及第五透镜l5。第五透镜l5和像面之间可设置过滤片gf(比如红外滤光片)。
49.其中,第一透镜l1具有负光焦度,第一透镜l1朝向物面的表面为第一表面s1,第一透镜l1朝向像面的表面为第二表面s2,第一表面s1为凸面,第二表面s2为凹面;第二透镜l2具有负光焦度,第二透镜l2朝向物面的表面为第三表面s3,第二透镜l2朝向像面的表面为第四表面s4,第三表面s3为凹面,第四表面s4为凸面;第三透镜l3具有正光焦度,第三透镜l3朝向物面的表面为第五表面s5,第三透镜l3朝向像面的表面为第六表面s6,第五表面s5为凸面,第六表面s6为凹面;第四透镜l4具有正光焦度,第四透镜l4朝向物面的表面为第七表面s7,第四透镜l4朝向像面的表面为第八表面s8,第七表面s7 为凸面,第八表面s8为凹面;第五透镜l5具有正光焦度,第五透镜l5朝向物面的表面为第九表面s9,第五透镜l5朝向像面的表面为第十表面s10,第九表面s9为凸面,第十表面s10为凹面。
50.优选的,为了追求成本低廉,体积小、结构简单易加工的效果,第一透镜 l1、第二透镜l2、第三透镜l3、第四透镜l4以及第五透镜l5均为塑料材质。塑料材质可以是pmma(polymethyl methacrylate,聚甲基丙烯酸甲酯,即有机玻璃,俗称亚克力)、pc(polycarbonate,聚碳酸脂)、apel5014(一种利用 ziegler聚合技术所开发出的一种环烯烃共聚)等材料制作,可降低成本。当然,对于一些温度变化较大的应用场景,透镜系统10可采用受温度影响小的玻璃材质,玻璃材质的透镜具有耐高温、耐腐蚀、耐划伤等特性,保护
整个透镜系统10在装配、运输、使用过程中不被划伤,在高温、低温、强光照、风沙等恶劣环境下不易被风解、破坏,从而延长了透镜系统10的使用寿命。
51.进一步的,第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4以及第五透镜l5均为非球面透镜,即,可把所有透镜均设置为塑料非球面透镜,可以通过优化系统参数,降低透镜组焦距受温度过冷或过热的影响。
52.根据实际需要,透镜系统10还可以包括孔径光阑sto,孔径光阑sto可以设置于第一透镜l1朝向物面一侧、第一透镜l1与第二透镜l2之间、第二透镜 l2与第三透镜l3之间、第三透镜l3与第四透镜l4之间或者第四透镜l4与第五透镜l5之间,不仅有利于增大视场角,而且可以限制光线中偏离理想位置的光线,降低彗差,从而改善透镜系统10的成像质量。应当理解的是,上述孔径光阑sto的大小可以根据需要设置,以最优化光圈的设置,本实用新型对此不做限制。
53.本实施例中,透镜系统10的光圈值fno满足fno≤1.2,可以使像面具有足够且适当的照度。
54.本实施例中,第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4以及第五透镜l5满足如下条件:
55.-5.0<f1<0;
56.-20.0<f2<0;
57.5.0<f3<15.0;
58.3.0<f4<10.0;
59.0<f5<12.0;
60.其中,f1为第一透镜l1的有效焦距,f2为第二透镜l2的有效焦距,f3 为第三透镜l3的有效焦距,f4为第四透镜l4的有效焦距,f5为第五透镜l5 的有效焦距。
61.进一步的,透镜系统还满足如下条件:
62.1.52<nd<1.95;
63.0.1<f/tl<0.6;
64.0.3<h<2.0;
65.0.25<h’<2.0;
66.其中,f为透镜系统10的有效焦距,nd为透镜材料在d线的折射率;tl 为第一透镜l1朝向物面的第一表面s1至像面的轴上距离;h为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4以及第五透镜l5的镜片的中心厚度, h’为第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4以及第五透镜l5 的镜片的边缘厚度。
67.当第一透镜l1、第二透镜l2、第三透镜l3、第四透镜l4以及第五透镜l5 满足上述条件时,透镜系统10可以获得较大的视场角,保证结构紧凑的同时获得最好的成像质量。
68.接下来将具体提供一种本实用新型的透镜系统10的设计参数,可以理解的是,设计参数仅用于示意,基于本实用新型原理的其他设计在本领域人员阅读本实用新型之后是显而易见的,因此也属于本实用新型的范围内。
69.本实施例中,透镜系统10能够在f/1.2处工作,且透镜系统10的视场角能够达到120
°
。
70.表1示出一种示例性的透镜系统10表面系数:
71.【表1】
[0072][0073][0074]
表2示出一种示例性的透镜系统10中各透镜的非球面数据。
[0075]
【表2】
[0076]
表面a4a6a8a10a12s18.515e-004-1.547e-0044.649e-0068.086e-007-4.287e-008s21.365e-0031.908e-004-4.498e-0042.566e-004-5.863e-005s3-7.266e-003-1.571e-004-1.351e-0041.119e-004-3.814e-005s4-0.0251.154e-003-4.522e-005-1.881e-005-4.887e-006s6-5.519e-003-2.620e-004-8.617e-006-5.658e-006-3.009e-006s7-7.383e-003-2.918e-004-1.559e-005-7.045e-006-9.036e-007s8-6.267e-004-6.047e-004-1.849e-0051.487e-005-6.881e-007s9-0.0113.577e-0045.710e-005-1.424e-0058.430e-007s10-4.442e-0031.487e-003-2.375e-0048.148e-006-2.195e-006s110.013-7.738e-0042.847e-006-2.030e-005-2.383e-009
[0077]
上述各透镜的非球面曲线方程式表示如下:
[0078][0079]
其中,z为沿光轴方向在高度为h的位置以表面顶点作为参考的位置值; c是透镜表面靠近光轴的曲率,并为曲率半径(r)的倒数(c=1/r),r为透镜表面靠近光轴的曲率半径,h是透镜表面距离光轴的垂直距离,k为圆锥系数,而a2、a4、a6、a8、a10、a12为高阶非球面系数。
[0080]
本实施例的透镜系统10的调制传递函数示意图,如图2所示;本实施例的透镜系统10的视场相对照度示意图,如图3所示;本实施例的透镜系统10的场曲及畸变示意图,如图4所示。
[0081]
实施例二:
[0082]
本实施例提供了一种飞行时间相机,本实施例与实施例一基本相同,符号含义与实施例一相同,以下只列出不同点。
[0083]
本实施例的投影模组100的投射光源为散斑,散斑点可以按四边形或六边形图案排布,投影模组100用于向空间中投影散斑图案。投影模组100包括投射透镜系统40,投射透镜系统40由四片透镜组成,投射透镜系统40的光路示意图如图7所示。本实施例中,投影模组100与采集模组200的畸变互补,可实现散斑畸变校正的效果。
[0084]
本实施例的投影模组100和采集模组200的畸变网格图,如图8所示;本实施例的投影模组100投射散斑和采集模组200接收散斑示意图,如图9所示;本实施例的投影模组100投射散斑在具体应用场景的示意图和采集模组200接收散斑在具体应用场景的示意图,分别如图10和图11所示。
[0085]
本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施方式,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1