显示系统以及微创手术机器人的制作方法
1.本技术涉及医疗器械技术领域,特别是涉及一种显示系统以及微创手术机器人。
背景技术:
2.微创手术机器人是集临床医学、生物力学、机械学、材料学、计算机科学、微电子学、机电一体化等诸多学科为一体的新型医疗器械。外科微创手术机器人的机械臂上可以设置手术刀、缝合线、手术钳、手术夹或其它手术器械等设备,医生可以使用控制设备控制各个机械臂,从而进行精准地手术。
3.其中,在微创手术机器人中,需要3d显示设备来完成对3d视频图像的实时显示,画面需要真实清晰,给医生提供较好的临场感,不能晃眼和闪烁,并且需要具备消除或减轻立体视觉眩晕的设计。
4.然而,传统的3d显示设备通常采用偏振3d屏进行图像显示。此时,医生佩戴3d眼镜可以看到立体图像。但是,当传统3d显示设备采用偏振3d屏时,偏振光显示会导致图像亮度减少,容易加剧医生的疲劳感和眩晕感,进而导致医生视线容易受到外界干扰而不能集中于手术区域。
技术实现要素:
5.基于此,针对上述问题,有必要提供一种显示系统以及微创手术机器人。
6.本技术提供一种显示系统。所述显示系统包括视频信号转换模块、左路显示模块、右路显示模块以及近眼显示模块。所述视频信号转换模块用于接收3d视频信号,并将所述3d视频信号转换为左路2d视频信号与右路2d视频信号。所述左路显示模块与所述视频信号转换模块连接,用于接收所述左路2d视频信号显示左路图像,并发出左路图像光。所述右路显示模块与所述视频信号转换模块连接,用于接收所述右路2d视频信号显示右路图像,并发出右路图像光。
7.所述近眼显示模块设置于所述左路图像光的光路上。且所述近眼显示模块设置于所述右路图像光的光路上。所述近眼显示模块用于将所述左路图像和所述右路图像传递到观察者的左眼和右眼。
8.在一个实施例中,所述显示系统还包括左路放大模块与右路放大模块。所述左路放大模块设置于所述左路图像光的光路上,用于将所述左路图像进行放大。所述右路放大模块设置于所述右路图像光的光路上,用于将所述右路图像进行放大。所述近眼显示模块设置于经所述左路放大模块的所述左路图像光的光路上,且所述近眼显示模块设置于经所述右路放大模块的所述右路图像光的光路上。
9.在一个实施例中,所述左路显示模块与所述左路放大模块的距离小于所述左路放大模块的一倍焦距。所述右路显示模块与所述右路放大模块的距离小于所述右路放大模块的一倍焦距。
10.在一个实施例中,所述左路放大模块包括三胶合透镜与凸透镜。所述三胶合透镜
设置于所述左路图像光的光路上。所述凸透镜设置于经所述三胶合透镜后的所述左路图像光的光路上。所述右路放大模块包括三胶合透镜与凸透镜。所述三胶合透镜设置于所述右路图像光的光路上。所述凸透镜设置于经所述三胶合透镜后的所述右路图像光的光路上。
11.在一个实施例中,所述近眼显示模块包括多个棱镜或/和多个反射镜。
12.在一个实施例中,所述近眼显示模块包括反射镜、第一直角棱镜以及第二直角棱镜。所述反射镜设置于经所述左路放大模块的所述左路图像光的光路上,用于形成左路图像反射光。所述反射镜设置于经所述右路放大模块的所述右路图像光的光路上,用于形成右路图像反射光。所述第一直角棱镜设置于所述左路图像反射光的光路上,用于全反射所述左路图像反射光。所述第二直角棱镜设置于所述右路图像反射光的光路上,用于全反射所述右路图像反射光。
13.在一个实施例中,所述显示系统还包括显示控制模块。所述显示控制模块与所述近眼显示模块连接,用于改变所述近眼显示模块的位置,以调节观察者的观察深度和瞳距。
14.在一个实施例中,所述左路显示模块为第一屏幕,所述右路显示模块为第二屏幕。
15.在一个实施例中,所述第一屏幕和所述第二屏幕的尺寸小于3d显示设备的显示屏幕的尺寸,所述第一屏幕和所述第二屏幕的像素密度大于3d显示设备的显示屏幕的像素密度。
16.在一个实施例中,本技术提供一种微创手术机器人。所述微创手术机器人包括上述实施例中任一项所述显示系统。
17.上述显示系统以及微创手术机器人,所述视频信号转换模块接收所述3d视频信号,并将所述3d视频信号转换成两路2d视频信号,即所述左路2d视频信号与所述右路2d视频信号。所述左路2d视频信号传输至所述左路显示模块,显示所述左路图像。此时,所述左路显示模块会发出与所述左路图像相对应的所述左路图像光。同理,所述右路显示模块会发出与所述右路图像相对应的所述右路图像光。
18.根据高斯成像定律,所述左路图像光通过所述近眼显示模块后,观察者的左眼位于所述近眼显示模块后的观察点处观察,可以看到所述左路显示模块上所述左路图像放大后的虚像。同理,所述右路图像光通过所述近眼显示模块后,观察者的右眼位于所述近眼显示模块后的观察点处观察,可以看到所述右路显示模块上所述右路图像放大后的虚像。
19.因此,通过所述显示系统中所述左路显示模块、所述右路显示模块以及所述近眼显示模块,即采用双目立体视觉,从而不需要对图像光进行偏振,可以实现所述3d视频信号的完整传输。此时,通过所述显示系统避免了采用偏振光显示导致的图像亮度减少、视线受偏振光干扰等问题。从而,通过所述显示系统,可以为观察者提供高清晰、3d立体景深明显、医疗形态精准还原的术野显示,使观察者在手术过程中具备视觉高临场感。并且,当观察者的左右眼分别位于所述近眼显示模块的观察点时,能形成立体视觉的效果,实现3d视频图像的实时显示。通过所述显示系统不需要佩戴3d眼镜就可以看到3d视频图像,使得观察者具有沉浸感的3d显示效果。
附图说明
20.为了更清楚地说明本技术实施例或传统技术中的技术方案,下面将对实施例或传统技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
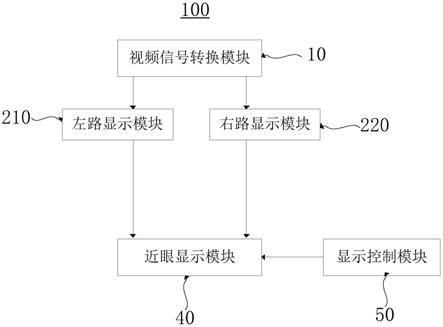
21.图1为本技术提供的一个实施例中显示系统的原理结构示意图。
22.图2为本技术提供的一个实施例中显示系统的原理结构示意图。
23.图3为本技术提供的一个实施例中显示系统的原理结构示意图。
24.图4为本技术提供的一个实施例中左路显示模块、左路放大模块以及近眼显示模块的位置关系示意图。
25.图5为本技术提供的一个实施例中右路显示模块、右路放大模块以及近眼显示模块的位置关系示意图。
26.图6为本技术提供的一个实施例中在观察者的较小瞳距情况下,左路放大模块、右路放大模块以及近眼显示模块的位置关系示意图。
27.图7为本技术提供的一个实施例中在观察者的较大瞳距情况下,左路放大模块、右路放大模块以及近眼显示模块的位置关系示意图。
28.附图标记说明:
29.显示系统100、视频信号转换模块10、左路显示模块210、右路显示模块220、左路放大模块310、右路放大模块320、近眼显示模块40、视频信号接收模块110、视频信号解码模块120、反射镜430、第一直角棱镜410、第二直角棱镜420、显示控制模块50。
具体实施方式
30.为了便于理解本技术,下面将参照相关附图对本技术进行更全面的描述。附图中给出了本技术的实施例。但是,本技术可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使本技术的公开内容更加透彻全面。
31.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
32.可以理解,本技术所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。举例来说,在不脱离本技术的范围的情况下,可以将第一电阻称为第二电阻,且类似地,可将第二电阻称为第一电阻。第一电阻和第二电阻两者都是电阻,但其不是同一电阻。
33.可以理解,以下实施例中的“连接”,如果被连接的电路、模块、单元等相互之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
34.在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。同时,在本说明书中使用的术语“和/或”包括相关所列项目的任何及所有组合。
35.请参阅图1,本技术提供一种显示系统100。所述显示系统100包括视频信号转换模块10、左路显示模块210、右路显示模块220以及近眼显示模块40。所述视频信号转换模块10用于接收3d视频信号,并将所述3d视频信号转换为左路2d视频信号与右路2d视频信号。所
述左路显示模块210与所述视频信号转换模块10连接,用于接收所述左路2d视频信号显示左路图像,并发出左路图像光。所述右路显示模块220与所述视频信号转换模块10连接,用于接收所述右路2d视频信号显示右路图像,并发出右路图像光。
36.所述近眼显示模块40设置于所述左路图像光的光路上。且所述近眼显示模块40设置于所述右路图像光的光路上。所述近眼显示模块40用于将所述左路图像和所述右路图像传递到观察者的左眼和右眼。
37.本实施例中,所述视频信号转换模块10接收所述3d视频信号,并将所述3d视频信号转换成两路2d视频信号,即所述左路2d视频信号与所述右路2d视频信号。所述左路2d视频信号传输至所述左路显示模块210,显示所述左路图像。此时,所述左路显示模块210会发出与所述左路图像相对应的所述左路图像光。同理,所述右路显示模块220会发出与所述右路图像相对应的所述右路图像光。
38.根据高斯成像定律,所述左路图像光通过所述近眼显示模块40后,观察者的左眼位于所述近眼显示模块40后的观察点处观察,可以看到所述左路显示模块210上所述左路图像放大后的虚像。同理,所述右路图像光通过所述近眼显示模块40后,观察者的右眼位于所述近眼显示模块40后的观察点处观察,可以看到所述右路显示模块220上所述右路图像放大后的虚像。所述观察点可以为观察者的左眼或者右眼的放置位置。
39.因此,通过所述显示系统100中所述左路显示模块210、所述右路显示模块220以及所述近眼显示模块40,不需要对图像光进行偏振,可以实现所述3d视频信号的完整传输。此时,通过所述显示系统100避免了采用偏振光显示导致的图像亮度减半的问题。从而,通过所述显示系统100,可以为观察者提供高清晰、3d立体景深明显、医疗形态精准还原的术野显示,使观察者在手术过程中具备视觉高临场感。并且,当观察者的左右眼分别位于所述近眼显示模块40的观察点时,能形成立体视觉的效果,实现3d视频图像的实时显示。通过所述显示系统100不需要佩戴3d眼镜就可以看到3d视频图像,给观察者具有沉浸感的3d显示效果。
40.请参阅图2,在一个实施例中,所述显示系统100还包括左路放大模块310与右路放大模块320。所述左路放大模块310设置于所述左路图像光的光路上,用于将所述左路图像进行放大。所述右路放大模块320设置于所述右路图像光的光路上,用于将所述右路图像进行放大。所述近眼显示模块40设置于经所述左路放大模块310的所述左路图像光的光路上。且所述近眼显示模块40设置于经所述右路放大模块320的所述右路图像光的光路上。
41.本实施例中,根据高斯成像定律,所述左路图像光通过所述左路放大模块310和所述近眼显示模块40后,观察者的左眼位于所述近眼显示模块40后的观察点处观察,可以看到所述左路显示模块210上所述左路图像放大后的虚像。同理,所述右路图像光通过所述右路放大模块320和所述近眼显示模块40后,观察者的右眼位于所述近眼显示模块40后的观察点处观察,可以看到所述右路显示模块220上所述右路图像放大后的虚像。通过所述左路放大模块310和所述右路放大模块320可以获得几倍于所述左路图像的图像尺寸和视场角,进而增大了视野,且大大减小了沉浸式显示器体积重量。
42.因此,通过所述显示系统100中所述左路显示模块210、所述右路显示模块220、所述左路放大模块310、所述右路放大模块320以及所述近眼显示模块40,不需要对图像光进行偏振,可以实现所述3d视频信号的完整传输。此时,通过所述显示系统100避免了采用偏
振光显示导致的图像亮度减半的问题。从而,通过所述显示系统100,可以为观察者提供高清晰、3d立体景深明显、医疗形态精准还原的术野显示,使观察者在手术过程中具备视觉高临场感。并且,当观察者的左右眼分别位于所述近眼显示模块40的观察点时,能形成立体视觉的效果,实现3d视频图像的实时显示。通过所述显示系统100不需要佩戴3d眼镜就可以看到3d视频图像,给观察者具有沉浸感的3d显示效果。
43.在一个实施例中,所述左路显示模块210和所述右路显示模块220可以为高像素密度显示屏,如液晶显示器(liquid crystal display,lcd)、发光二极管(light emitting diode,led)。
44.在一个实施例中,所述左路显示模块210和所述右路显示模块220可以为小型的投影设备或其它显示设备等。
45.请参阅图3,在一个实施例中,所述视频信号转换模块10包括视频信号接收模块110与视频信号解码模块120。所述视频信号接收模块110用于接收所述3d视频信号。所述视频信号解码模块120与所述视频信号接收模块110连接,用于将所述3d视频信号进行信号解码,转换为所述左路2d视频信号与所述右路2d视频信号。
46.本实施例中,所述视频信号接收模块110提供视频接口,接收所述3d视频信号,并将所述3d视频信号传输至所述视频信号解码模块120。所述视频信号解码模块120将所述3d视频信号转换成所述左路2d视频信号与所述右路2d视频信号。所述左路2d视频信号与所述右路2d视频信号相同,并分别传输至所述右路显示模块220与所述左路放大模块310进行显示。
47.在一个实施例中,所述视频信号接收模块110为信号接收端口,可以为高清晰度多媒体接口(high definition multimedia interface,hdmi)、数字视频接口(digital visual interface,dvi)、串行数字接口(serial digital interface,sdi)、二分量视频接口(separate video,s-video)、display port接口、通用串行总线(universal serial bus,usb)或其它标准信号端口等,也可以是自定义的视频端口。
48.在一个实施例中,所述视频信号解码模块120可以为视频解码板。
49.请参阅图4与图5,在一个实施例中,所述左路显示模块210与所述左路放大模块310的距离小于所述左路放大模块310的一倍焦距。所述右路显示模块220与所述右路放大模块320的距离小于所述右路放大模块320的一倍焦距。
50.本实施例中,将所述左路显示模块210和所述右路显示模块220分别设置于与所述左路放大模块310和所述右路放大模块320的成像镜头的一倍焦距以内。当所述左路图像光通过所述左路放大模块310和所述近眼显示模块40后,所述右路图像光通过所述右路放大模块320和所述近眼显示模块40后,观察者位于观察点(如图4和图5中所示)处进行观察,可以观察到所述左路图像和所述右路图像放大的虚像。从而,观察者可以观察到所述左路图像和所述右路图像,进而获得三维图像信息。通过所述左路显示模块210与所述左路放大模块310的相对位置关系,所述右路显示模块220与所述右路放大模块320的相对位置关系,可以增大视野范围,获得较大的图像尺寸和视场角。
51.在一个实施例中,所述左路显示模块210为第一屏幕。所述右路显示模块220为第二屏幕。所述第一屏幕和所述第二屏幕的尺寸小于3d显示设备的显示屏幕的尺寸,所述第一屏幕和所述第二屏幕的像素密度大于3d显示设备的显示屏幕的像素密度。
52.所述左路显示模块210采用小体积的高显示像素密度的小尺寸屏幕,并结合所述左路放大模块310和所述近眼显示模块40可以实现3d显示。所述右路显示模块220采用小体积的高显示像素密度的小尺寸屏幕,并结合右路放大模块320和所述近眼显示模块40可以实现3d显示。
53.所述左路显示模块210与所述右路显示模块220的体积小于传统3d显示设备的显示屏幕的体积,为小体积的高显示像素密度的屏幕。所述左路显示模块210与所述右路显示模块220的屏幕尺寸小于传统3d显示设备的显示屏幕的尺寸,为小尺寸的高显示像素密度的屏幕。所述左路显示模块210和所述右路显示模块220均采用高像素密度显示屏,大于3d显示设备的显示屏幕的像素密度,可以显示高清、4k甚至更高分辨率的图像。
54.所述左路显示模块210和所述右路显示模块220的尺寸较小,具有小型灵巧的特点、成本低廉,大大提高了易用性,降低了使用门槛,且方便携带使用。
55.在一个实施例中,所述左路放大模块310和所述右路放大模块320可以为一个大视场消畸变目镜。
56.在一个实施例中,所述左路放大模块310包括三胶合透镜与凸透镜。所述三胶合透镜设置于所述左路图像光的光路上。所述凸透镜设置于经所述三胶合透镜后的所述左路图像光的光路上。
57.本实施例中,所述左路显示模块210发出的所述左路图像光依次经过所述三胶合透镜和所述凸透镜,能在保证放大所述左路图像的同时将像差控制在理想的范围之内。
58.在一个实施例中,所述右路放大模块320包括三胶合透镜与凸透镜。所述三胶合透镜设置于所述右路图像光的光路上。所述凸透镜设置于经所述三胶合透镜后的所述右路图像光的光路上。
59.本实施例中,所述右路显示模块220发出的所述右路图像光依次经过所述凸透镜和所述三胶合透镜,能在保证放大所述右路图像的同时将像差控制在理想的范围之内。
60.通过凸透镜和三胶合透镜的组合,使得所述显示系统100的体积较小,降低了3d显示设备的重量,提高了所述显示系统100的易用性,降低了所述显示系统100的成本。
61.在一个实施例中,所述近眼显示模块40包括多个棱镜或/和多个反射镜。
62.本实施例中,通过多个棱镜或/和多个反射镜组合,将经所述左路放大模块310的所述左路图像光和经所述右路放大模块320的所述右路图像光进行反射,分别将所述左路图像和所述右路图像传递到观察者的左眼和右眼。
63.通过多个棱镜或/和多个反射镜可以改变所述左路图像光和所述右路图像光的光路路径,进而可以使得所述显示系统100的整体结构更加紧凑,从而可以缩小所述显示系统100的体积。
64.请参阅图6和图7,在一个实施例中,所述近眼显示模块40包括反射镜430、第一直角棱镜410以及第二直角棱镜420。所述反射镜430设置于经所述左路放大模块310的所述左路图像光的光路上,用于形成左路图像反射光。所述反射镜430设置于经所述右路放大模块320的所述右路图像光的光路上,用于形成右路图像反射光。所述第一直角棱镜410设置于所述左路图像反射光的光路上,用于全反射所述左路图像反射光。所述第二直角棱镜420设置于所述右路图像反射光的光路上,用于全反射所述右路图像反射光。
65.本实施例中,所述反射镜430具有两个反射镜面,一个反射镜面位于经所述左路放
大模块310的所述左路图像光的光路上,以形成左路图像反射光。另一个反射镜面位于经所述右路放大模块320的所述右路图像光的光路上,以形成右路图像反射光。通过所述反射镜430可以将所述左路图像光和所述右路图像光进行反射。所述第一直角棱镜410和所述第二直角棱镜420利用临界角特性,高效地内部全反射所述左路图像反射光和所述右路图像反射光。通过所述第一直角棱镜410和所述第二直角棱镜420更容易安装在所述显示系统100的内部,且对机械应力具有更好的稳定性和强度。
66.从而,通过所述反射镜430、所述第一直角棱镜410以及所述第二直角棱镜420,避免了偏振光的产生,进而避免了采用偏振光显示导致的图像亮度减半的问题。从而,通过所述显示系统100,可以为观察者提供高清晰、3d立体景深明显、医疗形态精准还原的术野显示,使观察者在手术过程中具备视觉高临场感。
67.请参阅图1、图2和图3,在一个实施例中,所述显示系统100还包括显示控制模块50。所述显示控制模块50与所述近眼显示模块40连接,用于改变所述近眼显示模块40的位置,以调节观察者的观察深度和瞳距。
68.本实施例中,通过所述显示控制模块50可以对所述近眼显示模块40的位置进行改变,如向前、向后、向左、向右等,以此来适应观察者的观察角度。从而,通过所述显示控制模块50控制所述近眼显示模块40,可以使得观察者(如医生)在操作中能够灵活地切换观察角度和姿势,保证了观察者(如医生)在长时间操作中的舒适度。从而,当观察者(如医生)使用所述显示系统100时,不会局限于固定的姿态,缓解了观察者(如医生)的疲累感。
69.在一个实施例中,所述显示控制模块50至少包括电机、电机驱动电路、按键以及传动模块。其中,所述按键与所述电机驱动电路连接,所述电机驱动电路与所述电机连接,所述电机与所述传动模块连接,所述传动模块与所述近眼显示模块40连接。所述传动模块包括联轴器、减速器组成或是其它传动结构组成,以带动所述近眼显示模块40转动。
70.此时,通过按键可以控制所述电机驱动电路,所述电机驱动电路控制电机,所述电机驱动所述传动模块传动,进而带动所述近眼显示模块40移动,实现所述近眼显示模块40位置的调节。从而,通过所述显示控制模块50可以驱动所述近眼显示模块40的光路前后和左右移动,从而达到调节观察深度和瞳距的目的。
71.请参阅图6和图7,在一个实施例中,所述显示控制模块50分别与所述第一直角棱镜410和所述第二直角棱镜420连接,用于控制所述第一直角棱镜410和所述第二直角棱镜420移动。
72.本实施例中,通过所述显示控制模块50改变所述第一直角棱镜410和所述第二直角棱镜420的相对位置,可以使得所述显示系统100适合于不同瞳距和观察深度的观察者使用。如图5为较小瞳距观察者使用时的情况。如图6为较大瞳距观察者使用时的情况。当观察者的瞳距较大时,通过所述显示控制模块50移动所述第一直角棱镜410与所述第二直角棱镜420的位置,可以改变所述第一直角棱镜410与所述第二直角棱镜420的左右方向的相对位置,从而改变观察者两眼的观察距以适应观察者的瞳距。左右方向也可以理解为水平方向,或者理解为图7所示的x方向。
73.在一个实施例中,所述显示控制模块50分别与所述第一直角棱镜410、所述第二直角棱镜420以及所述反射镜430连接,用于控制所述第一直角棱镜410、所述第二直角棱镜420以及所述反射镜430移动。当需要观察深度较大时,通过所述显示控制模块50移动所述
第一直角棱镜410、所述第二直角棱镜420以及所述反射镜430的位置,可以改变所述第一直角棱镜410、所述第二直角棱镜420以及所述反射镜430的前后方向的相对位置,从而改变观察者的观察深度。前后方向也可以理解为所述左路放大模块310(或者所述右路放大模块320)至所述反射镜430的方向,也可以理解为图7所示的y方向。
74.因此,通过所述显示控制模块50移动所述近眼显示模块40的所述第一直角棱镜410、所述第二直角棱镜420以及所述反射镜430,可以改变观察者的观察点的位置,如向前、向后、向左、向右等,以此来适应观察者的观察角度。
75.在一个实施例中,所述传动模块分别与所述第一直角棱镜410和所述第二直角棱镜420连接。通过按键可以控制所述电机驱动电路,所述电机驱动电路控制电机,所述电机驱动所述传动模块传动,进而改变所述第一直角棱镜410和所述第二直角棱镜420的位置关系,实现位置的调节。
76.因此,通过所述显示系统100,并未涉及偏振光的转换,避免了采用偏振光显示导致的图像亮度减半的问题。并且,所述显示系统100具有小型灵巧的特点,能让医生在长时间的手术中自由地切换姿势和观察角度,避免医生长时间的姿势保持而带来疲劳,极大地提高了设备的易用性。同时,所述显示系统100不会局限于其过于庞大的体积和固定的姿态,医生在手术时即使长时间保持同一个姿势,也不会加剧医生的疲累感。
77.在一个实施例中,本技术提供一种微创手术机器人。所述微创手术机器人包括上述实施例中任一项所述显示系统100。
78.本实施例中,所述微创手术机器人通过使用微创的方法,实施复杂的外科手术。所述微创手术机器人至少包括所述显示系统100、外科医生控制台、床旁机械臂系统等结构。通过所述显示系统100可以为操作者提供高清晰、3d立体景深明显、医疗形态精准还原的术野显示,使医生在手术过程中具备视觉高临场感。从而,通过所述微创手术机器人,医生更能把握操作距离,更能辨认解剖结构,提升了手术精确度。
79.其中,可以理解,上述实施例还可以采用其他形式,而不限于上述实施例已经提到的形式,只要其能够达到完成相应的功能即可。
80.在本说明书的描述中,参考术语“有些实施例”、“其他实施例”、“理想实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特征包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性描述不一定指的是相同的实施例或示例。
81.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
82.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1