边缘场平行板致动器的制作方法
背景技术:
1.致动器(例如,静电的和非静电的)用于各种技术中。例如,致动器可以用于相位光调制器(plm)以调制光的相位。相位光调制器可以被实施为包括反射镜阵列的微机电系统(mems)。入射光束从反射镜反射。mems反射镜可以独立地竖直移动以改变入射光束的相位。每个反射镜可以表示一个像素。这种微机电致动器系统中的每个像素包括基电极以及耦合到反射镜的弹簧电极。当基电极和弹簧电极之间产生电压差时,弹簧电极朝向基电极移动,从而将反射镜移动到不同的位置。这种微机电系统相位光调制器用于各种应用,例如高动态范围影院、光探测和测距系统、大容量光开关(例如,用于电信或服务器场)、显微镜/光谱学/自适应光学(例如,用于天文学、眼科、机器视觉等)和全息显示器。
技术实现要素:
2.在至少一个示例中,相位光调制器包括基板、反射镜、穿孔铰链板以及第一和第二支撑柱。穿孔铰链板支撑反射镜。穿孔铰链板具有第一弯曲臂和第二弯曲臂。穿孔铰链板被配置为基于基板和穿孔铰链板之间电位差的施加而朝向或远离基板移动。第一弯曲臂被连接到第一支撑柱,并且第二弯曲臂被连接到第二支撑柱。
附图说明
3.图1a和图1b图示了相位光调制器内反射镜的两个不同竖直位置。
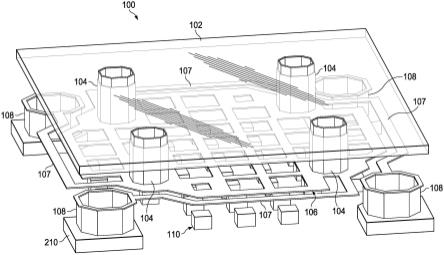
4.图2示出了图1a和图1b的相位光调制器的三维视图,其中铰链板根据一种配置而被穿孔。
5.图3示出了图2的铰链板的俯视图。
6.图4图示了用穿孔铰链板产生的边缘场。
7.图5a和图5b图示了穿孔铰链板但实心基板如何导致部分边缘场。
8.图6图示了穿孔铰链板的另一配置。
9.图7图示了基于未穿孔铰链板的平行板致动器和基于穿孔铰链板的平行板致动器的位移和偏置电压之间的关系的比较。
具体实施方式
10.如上所述,为了调制光束,相位光调制器(plm)包括可以被调整(例如,移动或移位)的反射镜,以便改变反射光束的特性(例如,相位)。在一些示例中,空间光调制器使用致动器来响应所施加电压来移动反射镜。在一些示例中,plm使用基于微机电系统(mems)的致动器来基于静电力和弹簧力的组合来移动反射镜。
11.平行板静电致动器(例如,用在mems中)是使用静电力来移动对象(例如,相位光调制器像素的反射镜)的器件。例如,致动器包括支撑反射镜的第一电极。第一电极也被锚定
到距第二(固定)电极距离d处的附件。第一电极包括附接到支撑柱的一个或更多个弯曲臂。弯曲臂用作弹簧(具有弹簧常数k)并有助于弹簧常数k(硬度)。第一电极和第二电极相互平行,并且在电极之间施加电位差以迫使它们靠得更近或更远,因此得名“平行板致动器”。
12.响应于相对于由第一电极及其弯曲臂实施的弹簧而在第一电极和第二电极之间施加的电位差(其产生静电力),第一电极朝向(或远离)第二电极移动。在一个实施方式中,第一电极接地并且第二电极被耦合到电压调节器。电压调节器向第二电极施加偏置电压。当施加到第二电极的偏压增加时,第一电极和第二电极之间的电压差产生静电力,该静电力驱动第一电极朝向第二电极,从而使反射镜朝向第二电极移动。替代地,可以将第二电极实施为数字电极,使得可以改变第二电极经受所施加电压的面积的量。随着第二电极接收所施加电压的面积的量增加,静电力也增加,导致第一电极被拉近第二电极。随着电压降低(和/或第二电极上施加电压的面积的量减少),静电力降低,导致第一电极远离第二电极(例如,由于弯曲臂的机械力)移动。以这种方式,控制器可以控制电压和/或第二电极上接收电压的面积的量以控制第一电极的位置,从而控制反射镜的位置。反射镜的行进量对应于plm的可实现的相位调制。
13.静电致动器包括“吸合(pull-in)”点,在本文中也称为塌陷点或不稳定点,对应于第一电极在塌陷发生之前能够行进的最大距离。塌陷是指第一电极加速进入与第二电极接触,从而破坏像素的功能。吸合点是一个平衡点,超过该点系统不稳定。
14.值“g”是指在没有任何静电力的情况下(即,没有施加的电位差)第一电极和第二电极之间的距离。对于平行板致动器,在电极不可控地塌陷在一起之前,第一电极不能行进超出1/3x g的距离。例如,如果g为900微米(micrometers)(“微米(microns)”),则在吸合发生之前,第一电极可能仅朝向基电极行进300微米。相位调制量是电极之间的相对行进距离和像素间距的函数。1/3x g行进限制不合需要地限制了plm的光学带宽。可以实施与大间距plm(即电极之间的g间隔较大的plm)更大的区别,以尝试提供更大的电极间行进距离。例如,g为1500微米的plm准许500微米的电极间行进距离,这大于g为900微米的plm的300微米行进距离。吸合电压(vpi)是指在吸合发生之前能够横跨电极施加的最大电压。对于平行板致动器,vpi为:
[0015][0016]
其中k是第一电极的弹簧常数,∈是两个电极之间的介电常数,并且a是第二(固定)电极的面积。从方程式(1)看到,随着g增加,吸合电压变大。对于vpi的电压幅度要求,对于某个值的g值将变得不切实际。用较小的k值(弯曲臂的弹簧常数)可以降低吸合电压。然而,使k值足够小以避免过大的plm也可能是不切实际的。因此,这之间(对于给定的像素间距和铰链的材料厚度)存在设计张力,一方面,希望g更大以促进更高的光学带宽plm,另一方面,需要不切实际的大偏置电压或弹簧常数小得不切实际的弹簧。
[0017]
图1a-图1b图示了在两个不同位置处的示例平行板静电致动器100(例如,以实施基于mems的plm)。图1a-图1b的示例致动器100包括反射镜102、支撑板103、反射镜附件104(例如,反射镜通孔)、铰链板106(也称为“弹簧电极”)、弯曲臂107、支撑柱108、基板110(也称为“基电极”)和电极电压控制器112。
[0018]
图1a-图1b的反射镜102取决于反射镜102的位置在两个或更多个方向上反射光
束。例如并且如图1a所示,反射镜102延伸到第一位置(例如,当没有电压施加到示例基板110时的中性位置)以在第一方向上反射光。反射镜102缩回到图1b中的第二位置以在第二方向上反射光。反射镜102由支撑板103支撑。支撑板103通过反射镜附件104耦合到铰链板106。在一些示例中,可以没有支撑板103并且反射镜102可以直接耦合到反射镜附件104。在一些示例中,可以包括不同的对象来代替反射镜102。在图1a和图1b的示例中,反射镜102和/或支撑板103被制造成比铰链板106大,使得反射镜102和/或支撑板103悬垂在支撑柱108上。在这种特定配置中,支撑柱108充当支撑板103的机械止动件,使得铰链板106面向基板110的表面能够正好接触基板110。尽管图1a-图1b的示例结构100包括三个反射镜附件104,但结构100可以包括任意数量的反射镜附件。
[0019]
图1a-图1b的示例铰链板106是包括弯曲臂107的电极。铰链板106的弯曲臂107的特征在于机械弹簧常数。当被拉伸时,弯曲臂107在与拉伸相反的方向上施加机械力。弯曲臂107被附接到支撑柱108。支撑柱108在该示例中接地。支撑柱108、弯曲臂107和铰链板106都由导电材料(例如金属)形成并耦合在一起(或形成为一组单一的部件),因此铰链板106由于支撑柱108接地而处于接地电位。以这种方式,当静电力被施加到铰链板106时,弯曲臂107朝向基板110延伸,致使铰链板106朝向基板110移动,从而致使反射镜102从图1a的第一位置朝向图1b的第二位置移动(即,更靠近基板110)。反射镜附件104可以为铰链板106提供刚性以确保铰链106不会随着静电力的增加而弯曲。虽然图1a和图1b图示了铰链板106相对于基板110的两个位置,但是施加在铰链板106和基板110之间的电位差可以改变以致使铰链板106处于相对于基板110的多个(两个,三个、四个或更多个)不同位置。例如,铰链板106和基板110之间的间隔距离可以通过模拟电压控制或连续变化的输出而连续变化。
[0020]
图2示出了图1a和图1b的结构100的三维视图。如该示例中所示,铰链板106和基板110是穿孔的,并且穿孔是矩形的(例如,正方形)。铰链板106因此是具有形成在其中的多个穿孔的导电构件。基板110包括大致对应于铰链板106的穿孔的多个电极。
[0021]
图3示出了图2的穿孔铰链板106和基板110的配置的俯视图。基板110包括电极阵列,并且穿孔铰链板106包括对应穿孔的阵列。如图3所示,铰链板包括中心穿孔301。一组八个穿孔311-318围绕中心穿孔301。一组12个穿孔331-342围绕八个穿孔311-318。一组12个穿孔371-382围绕12个穿孔371-382。基板110具有对应于铰链板106的穿孔的电极。基板110的电极302对应于铰链板106的中心穿孔301。电极321-328对应于穿孔311-318。电极351-362对应于穿孔331-342。电极391-402对应于穿孔371-382。基板110的每个电极的形状大致匹配铰链板106的对应穿孔的形状。在一个示例中,穿孔和电极的形状是矩形的。
[0022]
图3所示的穿孔铰链板106的配置表示四位数字电极配置。位0对应于中心电极302。位1对应于电极环321-328。位2对应于电极环351-362。位3对应于电极环391-402。导电迹线(未示出)电连接电极环321-328,使得电极321-328用作单个电极。导电迹线电连接电极环351-362,使得电极351-362用作单个电极。导电迹线还电连接电极环391-402,从而使电极391-402用作单个电极。因此,当四位值的位0生效(asserted时)(例如,“1”),偏置电压被施加到中心电极302。类似地,当位1生效时,偏置电压被施加到由电极环321-328形成的电极。当位2生效时,偏置电压被施加到由电极环351-362形成的电极。当位3生效时,偏置电压被施加到由电极环391-402形成的电极。施加到电极的每个分组的偏置电压可以相同。例如,如果位0和位1生效,则相同的电压被施加到电极302和电极321-328。如果所有四位都生
效,则所有电极302、电极321-328、电极351-362和电极391-402接收相同的电压。
[0023]
当从上方观察时,如图3所示,具有长度s4的间隙将导电部分354从由对应穿孔334限定的面对壁隔开。相同的长度s4可以应用在导电部分354的所有四个侧面周围,以及所有其他导电部分302、导电部分321-328、导电部分351-362和导电部分391-402。s4不应该任意小,因为在这种情况下,边缘场效应会减弱,并且器件将表现为更像是具有平行板静电的简单穿孔铰链。
[0024]
在一个示例实施方式中(图3中未示出),基板110的电极分组的面积是二进制加权的,这意味着如果电极302的面积是“x”,则位1电极环321-328的总面积是2x,位2电极环351-362的总面积是4x,并且位3电极环391-402的总面积是8x。当边缘场致动器在图7所示的线性位移区域中运行时(下文讨论),该器件能够进行相对较大的位移,而这是用传统的平行板致动器不容易实现的。
[0025]
图4图示了通过对铰链板106(具有基板100的对应电极)进行穿孔,边缘电场横跨电极区产生,在穿孔铰链板106的边缘/拐角处具有最强场。在图4中的410处,中心电极302被示出为在穿孔301内。穿孔301部分地由铰链板106的导电部分303和304(也示出在图3中)限定。电场线411被示出为在导电部分303/304和电极302之间。在420处,铰链板106(具有其导电部分303/304)被示出为更靠近基板110(具有其电极302)。当铰链板106由于偏置电压而被拉动靠近基板110时,在导电部分303/304之间产生的电场以及电极302和303/304之间的静电吸引力由边缘场主导,如430的电场线413相对于410的电场线411所示。结果,铰链板106可以被带到与基板110相同的平面而不会发生吸合。在具有未穿孔平行板的致动器与关于图3和图4描述的穿孔铰链板配置之间,所有其他方面都是相同的,穿孔铰链板可以实现更大的竖直位移,从而使用这种结构实现plm的更大的光学带宽。
[0026]
铰链板106和基板110之间的静电力(f
el
)由下式给出:
[0027][0028]
其中a
el
是铰链板106的有效面积,x是铰链板106和基板110之间的可控距离,v是偏置电压。面积(a
el
)被称为“有效”面积。考虑到平行板电容器,如果仅计算其面向另一板的表面积,则a0将表示电容器的面积。然而,对于有限面积的电容器,其所有侧面周围都将存在边缘场。因此,电容器将具有比承受电场的两个直接相对的面更大的面积(“有效面积”)。随着x增加(意味着铰链板106由于偏置电压被施加到基板的更多位电极环而变得更靠近基板110),有效面积a
el
减小。因此,a
el
被调制为铰链板106和基板110之间距离的函数。随着板相互拉近而减小的a
el
至少在一定程度上抵消了x的增加,从而与未穿孔平行板的f
el
相比减小了静电力f
el
。
[0029]
图3和图4的示例图示了铰链板106是穿孔的并且基板110被形成为一系列离散电极。图5a和图5b示出了铰链板106如图4所示穿孔但基板110是实心的(即,不是离散电极)的另一个示例。电场线511说明了一些电场是边缘场,而电场513说明了由于平行板而引起的电场。由于仅铰链板106被穿孔导致的部分边缘场,与具有未穿孔平行板的plm相比,铰链板106可以在吸合发生之前被带至更靠近基板110。
[0030]
图6示出了铰链板606和基板610的示例。弯曲臂607从支撑柱108延伸到铰链板606中,如图所示。铰链板606具有包括四个外部锯齿状穿孔621-624的配置。每个外部锯齿状穿
孔621-624具有相对表面,相对表面具有锯齿形状。例如,穿孔621具有一对相对表面625和626,并且每个表面具有如图所示的锯齿形。穿孔622-624也是如此。基板具有四个对应的锯齿状电极631-634的配置,当从上方观察时,锯齿状电极631-634位于穿孔621-624内,如图6所示。相应地,每个锯齿状电极都在对应的锯齿状穿孔的覆盖范围内(每个穿孔的覆盖范围大于每个对应电极的覆盖范围)。每个电极631-634的面积小于每个对应的穿孔621-624的面积。电极631-634通过导电元件635电连接。在一个实施例中,电极631-634和导电元件635被形成为单一导电结构。电极631-634表示四位电极结构的位3。这种形状有多种用途。首先,通过引入锯齿,增加了给定面积中可以包含的线性距离。其次,尖点的引入用作进一步集中导体边缘处的电荷并且增强边缘场效应。
[0031]
铰链板606还具有一组内部穿孔641-644,并且基板具有对应于穿孔641-644的电极651-654。每个电极651-654的面积小于每个对应的穿孔641-644的面积。每个锯齿状电极651-654在对应的锯齿状穿孔641-644的覆盖范围内。电极651-654相互连接并对应于位2。铰链板606还包括穿孔661-664,并且基板具有对应于穿孔661-664的电极671-674,并且电极671-674具有小于对应的穿孔面积的面积。电极671-674相互连接并且表示位1。每个电极671-674在对应的穿孔661-664的覆盖范围内。基板包括在691处的中心电极(但在图6的视图中被隐藏)。在这种情况下,位0是平行板致动器。
[0032]
电极651-654中的每一个包括相应的一对三角形突起。例如,电极651图示了三角形突起695和696。穿孔641的内表面的轮廓包括用于三角形突起695、696中的每一个的匹配的三角形凹槽697、698。三角形突起促进附加边缘场。
[0033]
因此,图6的配置包括输出穿孔环621-624,输出穿孔环621-624环绕内部穿孔环641-644。此外,穿孔环641-644环绕穿孔环661-664。基板610被类似地配置有多个电极环——一个环环绕一个内部环以此类推。
[0034]
边缘场的面积可能受到底层金属布线的限制。在这种情况下,所有金属布线都在表面,因此一些平行板行为可能是不可避免的。此外,应基于铰链的机械硬度来平衡穿孔。在plm的情况下,反射镜和反射镜通孔可能会增加铰链的刚度,但代价是反射镜通孔下方和一些周围的区需要实心铰链金属来解决未对准问题。边缘场电极的设计也应考虑制造未对准容差。
[0035]
图7示出了位移相对于偏置电压的曲线图。位移值是指铰链板距其初始状态g的距离x。图7中示出了三条曲线710、716、720。曲线属于平行板plm。曲线710表示未穿孔铰链板的位移,而曲线720表示穿孔铰链板(例如,图3或图4的铰链板106或图6的铰链板606和穿孔基板110)的位移。随着偏置电压增加,曲线710图示了位移也增加。曲线710终止于表示250nm位移的线711。线711是两个平行板(未穿孔)不希望地朝向彼此塌陷的吸合点。因此,对于未穿孔平行板,plm的致动器无法进行超过711线的位移。图7的示例用于750nm的g,因此线711是250nm(1/3x 750nm)的位移。曲线716用于其中铰链板是穿孔的但基板110未穿孔的plm。在这种配置中实施了一些超行程(overtravel)——比曲线710所表征的未穿孔结构多,但少于曲线720的穿孔铰链和基板结构。
[0036]
曲线720表示其中铰链板被穿孔的plm的行为。在这种情况下,基板也被构造成离散电极,例如图3和图6所示的离散电极。由于这些电极配置所实施的边缘场,致动器能够进行显著更大的位移。如图7的示例所示,铰链板甚至能够延伸超出基板110的平面,因此能够
进行甚至大于750nm的g的位移。
[0037]
区域760针对小于1/3x g(在本示例中小于250nm)的位移。区域765针对g的三分之一和100%之间的位移。区域760内的曲线720的形状不同于区域765内的曲线720的形状。在区域760内,穿孔铰链板和基板主要用作平行板。然而,在区域765内,由于边缘场效应,致动器在位移和偏置电压之间表现出比区域760更线性的关系。对于所公开的示例,尽管plm应用需要线性位加权致动,但由于与偏置相关的适当反馈和控制回路,整个范围是可用的行进距离,这对于以前的plm是不可能的。
[0038]
在权利要求的范畴内,在所描述的实施例中的修改是可能的,并且其他实施例是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1