光学元件驱动装置、摄像机模块及摄像机搭载装置的制作方法
1.本发明涉及光学元件驱动装置、摄像机模块及摄像机搭载装置。
背景技术:
2.一般而言,在智能手机等便携终端中搭载有小型的摄像机模块。在这种摄像机模块中应用具有在拍摄被拍摄物时自动进行对焦的自动聚焦功能(以下称作“af功能”,af:auto focus,自动聚焦)以及对拍摄时产生的抖动(振动)进行光学修正以减轻图像模糊的抖动修正功能(以下称作“ois功能”,ois:optical image stabilization,光学防抖)的光学元件驱动装置(例如专利文献1)。
3.具有af功能和ois功能的光学元件驱动装置具备用于使透镜部沿光轴方向移动的自动聚焦驱动单元(以下称作“af驱动单元”)以及用于使透镜部在与光轴方向正交的平面内摆动的抖动修正驱动单元(以下称为“ois驱动单元”)。专利文献1中,af驱动单元和ois驱动单元中应有了音圈电机(vcm:voice coil motor)。
4.另外,近年来,正在推进具有多个(典型地为两个)光学元件驱动装置的摄像机模块的实用化(所谓的双镜头摄像机)。双镜头摄像机根据使用场景具有多种可能性,例如能够同时对焦距不同的两张图像进行摄像,以及能够同时对静态图像和动态图像进行摄像等。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2013-210550号公报
8.专利文献2:国际公开第2015/123787号
技术实现要素:
9.发明要解决的问题
10.然而,如专利文献1那样,利用了vcm的光学元件驱动装置受到外部磁性的影响,所以有可能损害高精度的动作。尤其是,在光学元件驱动装置被并排配置的双镜头摄像机中,在光学元件驱动装置之间产生磁干扰的可能性较高。
11.另一方面,在专利文献2中公开了在af驱动单元和ois驱动单元中应用了超声电机的光学元件驱动装置。专利文献2中公开的光学元件驱动装置是无磁的,所以能够减少外部磁性的影响,但结构复杂,难以实现小型化和低高度化。
12.本发明的目的在于提供能够实现小型化和低高度化,并且能够提高驱动性能的光学元件驱动装置、摄像机模块和摄像机搭载装置。
13.解决问题的方案
14.本发明的光学元件驱动装置具备:
15.第一固定部;
16.第一可动部,配置于所述第一固定部的径向内侧;
17.支撑部,介于所述第一固定部与所述第一可动部之间,且相对于所述第一固定部支撑所述第一可动部;
18.z方向驱动部,具有将振动转换为直线运动的超声电机,且通过所述直线运动使所述第一可动部在光轴方向上移动;以及
19.第一施力部,配置于所述第一固定部,将所述第一支撑部向所述第一可动部施力,
20.所述第一施力部具有对所述支撑部施力的弹性部件和配置于所述弹性部件与所述支撑部之间的间隔件。
21.本发明的摄像机模块具备:
22.上述的光学元件驱动装置;
23.光学元件,安装于所述可动部;以及
24.摄像部,对由所述光学元件成像的被拍摄物像进行摄像。
25.本发明的摄像机搭载装置为信息设备或运输设备,该摄像机搭载装置具备:
26.上述的摄像机模块;以及
27.图像处理部,对由所述摄像机模块得到的图像信息进行处理。
28.发明效果
29.根据本发明,能够实现光学元件驱动装置、摄像机模块及摄像机搭载装置的小型化和低高度化,并且能够提高驱动性能。
附图说明
30.图1a、图1b是表示搭载有本发明的一实施方式的摄像机模块的智能手机的图。
31.图2是摄像机模块的外观立体图。
32.图3a、图3b是实施方式的光学元件驱动装置的外观立体图。
33.图4是实施方式的光学元件驱动装置的分解立体图。
34.图5是实施方式的光学元件驱动装置的分解立体图。
35.图6是表示底座的配线结构的俯视图。
36.图7a、图7b是ois驱动单元的立体图。
37.图8是ois可动部的分解立体图。
38.图9是ois可动部的分解立体图。
39.图10是ois可动部的分解立体图。
40.图11a、图11b是af驱动单元的立体图。
41.图12是表示af可动部和ois可动部进行移动时的基准轴的图。
42.图13a、图13b是表示第一z方向基准轴的图。
43.图14a、图14b是表示第二z方向基准轴的图。
44.图15a~图15c是表示第一x方向基准轴和第二x方向基准轴的图。
45.图16a~图16c是表示第一y方向基准轴和第二y方向基准轴的图。
46.图17是表示ois动力传递部的一例的图。
47.图18a、图18b是表示滚珠容纳部的封闭形态的一例的图。
48.图19a、图19b是表示af动力传递部的一例的图。
49.图20是表示第二z方向基准滚珠的一例的图。
50.图21是变形例1的af驱动单元的立体图。
51.图22是变形例1的af驱动单元的分解立体图。
52.图23a是变形例1的af驱动单元的顶视图,图23b是侧视图,图23c是图23a的a-a向视剖视图。
53.图24a、图24b是变形例1的ois驱动单元的立体图。
54.图25是从光轴方向受光侧观察变形例2的ois可动部的俯视图。
55.图26是变形例2的ois可动部的分解立体图。
56.图27a、图27b是变形例2的af可动部和第一台部的俯视图。
57.图28a、图28b是变形例2的ois可动部的横剖面和纵剖面的放大图。
58.图29a、图29b是表示af可动部相对于第一台部的施力形态的图。
59.图30a、图30b是表示作为搭载有车载用摄像机模块的摄像机搭载装置的汽车的图。
具体实施方式
60.下面,基于附图对本发明的实施方式进行详细说明。
61.图1a、图1b是表示搭载有本发明的一实施方式的摄像机模块a的智能手机m(摄像机搭载装置的一例)的图。图1a是智能手机m的主视图,图1b是智能手机m的后视图。
62.智能手机m具有由两个背面摄像机oc1和oc2构成的双镜头摄像机。在本实施方式中,摄像机模块a应用于背面摄像机oc1和oc2。
63.摄像机模块a具备af功能和ois功能,能够自动地进行对被拍摄物进行拍摄时的对焦,并且能够对在拍摄时产生的抖动(振动)进行光学修正来拍摄到不模糊的图像。
64.图2是摄像机模块a的外观立体图。图3a、图3b是实施方式的光学元件驱动装置1外观立体图。图3b示出将图3a绕z轴旋转180
°
后的状态。如图2、图3a及图3b所示,在实施方式中,使用正交坐标系(x,y,z)进行说明。在后述的图中,也用相同的正交坐标系(x,y,z)来进行表示。
65.例如,以在智能手机m实际进行拍摄时x方向成为上下方向(或左右方向)、y方向成为左右方向(或上下方向)、z方向成为前后方向的方式,搭载摄像机模块a。即,z方向为光轴方向,图中上侧(+z侧)为光轴方向受光侧,下侧(-z侧)为光轴方向成像侧。另外,将与z轴正交的x方向及y方向称作“光轴正交方向”,将xy面称作“光轴正交面”。
66.如图2、图3a及图3b所示,摄像机模块a具备实现af功能和ois功能的光学元件驱动装置1、将透镜容纳于圆筒形状的透镜筒中而成的透镜部2以及对由透镜部2成像的被拍摄物像进行摄像的摄像部3等。即,光学元件驱动装置1是作为光学元件驱动透镜部2的所谓的透镜驱动装置。
67.摄像部3配置于光学元件驱动装置1的光轴方向成像侧。摄像部3例如具有图像传感器基板301、安装于图像传感器基板301的摄像元件302及控制部303。摄像元件302例如由ccd(charge-coupled device,电荷耦合器件)型图像传感器、cmos(complementary metal oxide semiconductor,互补金属氧化物半导体)型图像传感器等构成,对由透镜部2成像的被拍摄物像进行摄像。控制部303例如由控制ic构成,进行光学元件驱动装置1的驱动控制。光学元件驱动装置1搭载于图像传感器基板301,并与其机械连接且电连接。应予说明,控制
部33可以设置于图像传感器基板301,也可以设置于搭载有摄像机模块a的摄像机搭载设备(实施方式中为智能手机m)。
68.光学元件驱动装置1的外侧是由罩24覆盖的。罩24是在从光轴方向观察的俯视时呈矩形状的有盖四棱筒体。在实施方式中,罩24的平面形状为正方形状。罩24在上表面具有大致圆形的开口241。透镜部2从罩24的开口241面向外部,例如构成为,伴随光轴方向上的移动,突出到比罩24的开口面更靠受光侧的位置。罩24例如通过粘接固定于光学元件驱动装置1的ois固定部20的底座21(参照图4)。
69.图4、图5是实施方式的光学元件驱动装置1的分解立体图。图5示出将图4绕z轴旋转180
°
后的状态。图4示出安装了ois驱动单元30和传感器基板22的状态,图5示出拆下ois驱动单元30和传感器基板22后的状态。
70.如图4、图5所示,在本实施方式中,光学元件驱动装置1具备ois可动部10(第二可动部)、ois固定部20(第二固定部)、ois驱动单元30(xy方向驱动部)及ois支撑部40(第二支撑部)。ois驱动单元30具有第一ois驱动单元30x(x方向驱动单元)和第二ois驱动单元30y(y方向驱动单元)。
71.ois可动部10是在抖动修正时在光轴正交面内摆动的部分。ois可动部10包括af单元、第二台部13及x方向基准滚珠42a~42c(参照图8等)。af单元具有af可动部11(第一可动部)、第一台部12(第一固定部)、af驱动单元14(z方向驱动部)及af支撑部15(第一支撑部)(参照图8~图10)。
72.ois固定部20是隔着ois支撑部40连接ois可动部10的部分。ois固定部20包括底座21。
73.ois可动部10相对于ois固定部20在光轴方向上间隔开配置,且隔着ois支撑部40与ois固定部20连结。另外,ois可动部10和ois固定部20通过ois用施力部件50被向彼此靠近的方向施力。在本实施方式中,ois用施力部件50配置于光学元件驱动装置1的俯视时的四角。
74.在本实施方式中,关于y方向上的移动,包括af单元的ois可动部10整体作为可动体移动。另一方面,关于x方向上的移动,仅af单元作为可动体移动。也就是说,关于x方向上的移动,第二台部13与底座21一起构成ois固定部20,x方向基准滚珠42a~42c作为ois支撑部40发挥功能。
75.底座21是由如下成型材料形成的,该成型材料例如包括:聚芳酯(par:polyarylate)、包括par在内的多种树脂材料混合而成的par合金(par alloy,例如,par/pc)或液晶聚合物。底座21是平面形状为矩形状的部件,且在中央具有圆形的开口211。
76.底座21具有形成底座21的主面的第一底座部212和第二底座部213。第二底座部213与ois可动部10的向光轴方向成像侧突出的部分,即af可动部11的突出部112a~112d和第一台部12的af电机固定部125(参照图8、图9)对应而设置。第二底座部213形成为俯视时呈比突出部112a~112d和af电机固定部125大一圈,以免在抖动修正时产生干扰。在第二底座部213中的配置有端子金属零件23b的区域中,以局部(与突出部112b、112c对应的部分)露出的方式配置有传感器基板22。第二底座部213形成为相对于第一底座部212凹陷,由此确保af可动部11的移动行程,并且实现了光学元件驱动装置1的低高度化。
77.在本实施方式中,传感器基板22设置于未配置af驱动单元14和ois驱动单元30的
区域,即,与作为底座21的平面形状的矩形的一边(第四边)对应的区域。由此,能够将磁性传感器25x、25y、25z用的供电线和信号线汇集,从而能够简化底座21中的配线结构(参照图6)。
78.底座21具有配置第二ois驱动单元30y的ois电机固定部215。ois电机固定部215例如设置于底座21的角部,形成为从第一底座部212向光轴方向受光侧突出,具有能够保持第二ois驱动单元30y的形状。
79.在底座21上,例如通过嵌件成型而配置有端子金属零件23a~23c。端子金属零件23a包括对af驱动单元14和第一ois驱动单元30x的供电线。端子金属零件23a例如从形成于底座21的四角的开口216露出,与ois用施力部件50电连接。对af驱动单元14和第一ois驱动单元30x的供电是经由ois用施力部件50来进行的。端子金属零件23b包括对磁性传感器25x、25y、25z的供电线(例如,4条)及信号线(例如,6条)。端子金属零件23b与形成于传感器基板22的配线(省略图示)电连接。端子金属零件23c包括对第二ois驱动单元30y的供电线。
80.另外,底座21具有配置构成ois支撑部40的y方向基准滚珠41a~41c的y方向基准滚珠保持部217a~217c(参照图16a~图16c)。y方向基准滚珠保持部217a~217c形成为沿y方向延伸的矩形状的凹陷。y方向基准滚珠保持部217a~217c形成为其剖面形状呈大致v字状(锥形),其槽宽向底面侧变窄。
81.在本实施方式中,y方向基准滚珠保持部217a、217b设置于底座21的配置第二ois驱动单元30y的边(第三边),y方向基准滚珠保持部217c设置于配置传感器基板22的边(第四边),并且由y方向基准滚珠41a~41c以三点支撑ois可动部10(第二台部13)。
82.传感器基板22具有包括磁性传感器25x、25y、25z用的供电线和信号线的配线(省略图示)。在传感器基板22上安装有磁性传感器25x、25y、25z。磁性传感器25x、25y、25z例如由霍尔元件或tmr(tunnel magneto resistance,隧道磁阻)传感器等构成,经由形成于传感器基板22的配线(省略图示),与端子金属零件23b电连接。另外,在传感器基板22的与y方向基准滚珠保持部217c对应的部分设置有开口221。
83.在ois可动部10的第一台部12上,在与磁性传感器25x、25y相对的位置配置有磁铁16x、16y(参照图10)。通过由磁性传感器25x、25y及磁铁16x、16y构成的位置检测部,来检测ois可动部10的x方向和y方向上的位置。
84.另外,在ois可动部10的af可动部11上,在与磁性传感器25z相对的位置配置有磁铁16z(参照图10)。通过由磁性传感器25z和磁铁16z构成的位置检测部,来检测af可动部11的z方向上的位置。应予说明,也可以是,代替磁铁16x、16y、16z及磁性传感器25x、25y、25z,而通过光反射器等光传感器来检测ois可动部10的x方向和y方向上的位置以及af可动部11的z方向上的位置。
85.ois用施力部件50例如由螺旋拉伸弹簧构成,连结ois可动部10与ois固定部20。在本实施方式中,ois用施力部件50的一端与底座21的端子金属零件23a连接,另一端与第一台部12的配线17a、17b连接。ois用施力部件50受到将ois可动部10与ois固定部20连结时的拉伸载荷,以使ois可动部10与ois固定部20彼此靠近的方式发挥作用。即,ois可动部10在被ois用施力部件50沿光轴方向施力的状态(被按压于底座21的状态)下,被保持为可在xy面内摆动。由此,能够在不颤动的稳定的状态下保持ois可动部10。
86.另外,在本实施方式中,ois用施力部件50作为对af驱动单元14和第一ois驱动单
元30x的供电线发挥功能。
87.ois支撑部40在使ois可动部10相对于ois固定部20在光轴方向上间隔开的状态下,将ois可动部10支撑于ois固定部20。在本实施方式中,ois支撑部40包括介于ois可动部10(第二台部13)与底座21之间的三个y方向基准滚珠41a~41c。
88.另外,ois支撑部40在ois可动部10中包括介于第一台部12与第二台部13之间的三个x方向基准滚珠42a~42c(参照图8等)。
89.在本实施方式中,通过限制y方向基准滚珠41a~41c和x方向基准滚珠42a~42c(共6个)的可滚动的方向,能够使ois可动部10在xy面内精度良好地摆动。应予说明,构成ois支撑部40的y方向基准滚珠和x方向基准滚珠的数量可以适当变更。
90.ois驱动单元30是使ois可动部10在x方向和y方向上移动的致动器。具体而言,ois驱动单元30包括使ois可动部10(仅af单元)在x方向上移动的第一ois驱动单元30x(第一xy方向驱动单元)以及使ois可动部10整体在y方向上移动的第二ois驱动单元30y(第二xy方向驱动单元)。
91.第一ois驱动单元30x和第二ois驱动单元30y由超声电机构成。第一ois驱动单元30x固定于第一台部12的沿着x方向的ois电机固定部124(参照图9)。第二ois驱动单元30y以沿着y方向延伸的方式,固定于底座21的ois电机固定部215。即,第一ois驱动单元30x和第二ois驱动单元30y沿着彼此正交的边配置。
92.ois驱动单元30的结构如图7a、图7b所示。图7a表示ois驱动单元30的各部件组装后的状态,图7b表示将ois驱动单元30的各部件分解后的状态。应予说明,图7a、图7b示出了第二ois驱动单元30y,但第一ois驱动单元30x的主要结构与第二ois驱动单元30y相同,因此将图7a、图7b视为表示ois驱动单元30的图,该主要结构具体而言是除了ois电极33的形状以外的结构。
93.如图7a、图7b所示,ois驱动单元30具有ois共振部31、ois压电元件32、ois电极33及ois动力传递部34。ois驱动单元30的驱动力经由ois动力传递部34传递到第二台部13。具体而言,第一ois驱动单元30x经由第一ois动力传递部34x与第二台部13连接,第二ois驱动单元30y经由第二ois动力传递部34y与第二台部13连接。即,在ois驱动单元30中,ois共振部31构成主动器件,ois动力传递部34构成被动器件。
94.ois压电元件32例如是由陶瓷材料形成的板状元件,通过施加高频电压而产生振动。以将ois共振部31的躯干部311夹入的方式配置两张ois压电元件32。
95.ois电极33将ois共振部31和ois压电元件32夹持,对ois压电元件32施加电压。第一ois驱动单元30x的ois电极33与第一台部12的配线17a电连接,第二ois驱动单元30y的ois电极33与底座21的端子金属零件23c电连接。
96.ois共振部31由导电材料形成,与ois压电元件32的振动共振,将振动运动转换为直线运动。ois共振部31例如通过金属板的激光加工、蚀刻加工或冲压加工等形成。在本实施方式中,ois共振部31具有:被ois压电元件32夹持的大致矩形状的躯干部311、从躯干部311的上部及下部沿x方向或y方向延伸的两个臂部312、从躯干部311的中央部沿x方向或y方向延伸的突出部313以及从躯干部311的中央部向与突出部313相反的一侧延伸的通电部314。两个臂部312具有对称的形状,各自的自由端部与ois动力传递部34抵接,与ois压电元件32的振动共振而对称地变形。第一ois驱动单元30x的通电部314与第一台部12的配线17a
电连接,第二ois驱动单元30y的通电部314与底座21的端子金属零件23c电连接。
97.ois压电元件32从厚度方向贴合于ois共振部31的躯干部311,并被ois电极33夹持,从而它们彼此电连接。例如,供电路径中的一个与ois电极33连接,另一个与ois共振部31的通电部314连接,由此,对ois压电元件32施加电压,产生振动。
98.ois共振部31至少具有两个共振频率,相对于各个共振频率,以不同的动作变形。换言之,以相对于两个共振频率而以不同的动作变形的方式,对ois共振部31的整体形状进行设定。不同的动作是指,使ois动力传递部34沿x方向或y方向前进的动作以及沿x方向或y方向后退的动作。
99.ois动力传递部34是在一个方向上延伸的卡紧引导件,其一端与ois共振部31的臂部312连接,另一端与第二台部13连接。ois动力传递部34具有ois电机抵接部341、台部固定部343以及连结部342。ois电机抵接部341与ois共振部31的臂部312的自由端部抵接。台部固定部343配置于ois动力传递部34的端部,固定于第二台部13的ois卡紧引导件固定部135(参照图8等)。连结部342是连结ois电机抵接部341与台部固定部343的部分,从台部固定部343分支为两部分且这两部分形成为彼此大致平行。
100.ois电机抵接部341间的宽度设定为比ois共振部31的臂部312的自由端部之间的宽度更宽。例如,在连结部342与台部固定部343的连接部分,使大于连接端部的宽度的隔离部344介于两个连结部342之间,从而能够扩展ois电机抵接部341间的宽度。由此,在将ois动力传递部34安装于ois共振部31的臂部312之间时,连结部342作为板簧发挥功能,从而推压力向使臂部312扩张的方向作用。通过该推压力,ois动力传递部34保持于臂部312的自由端部之间,来自ois共振部31的驱动力有效地传递到ois动力传递部34。隔离部344例如与台部固定部343一体地形成。
101.应予说明,在图7a、图7b所示的例子中,在台部固定部343中,连结部342的安装部分的一侧是开放的,但如图17所示,台部固定部343也可以具有将连结部342的根部(台部固定部343侧的端部)夹入的结构。在该情况下,能够防止连结部342随着时间的推移而位移并脱落,可靠性会提高。
102.ois共振部31与ois动力传递部34仅是在被施力的状态下相互抵接,因此,只要将抵接部分在x方向或y方向上增大,就能够使ois可动部10的移动行程变长,而无需增大光学元件驱动装置1的外形。
103.第一ois驱动单元30x固定于ois可动部10(第一台部12),并经由ois动力传递部34x与第二台部13连接,在由第二ois驱动单元30y进行y方向上的抖动修正时,与ois可动部10一起移动。另一方面,第二ois驱动单元30y固定于ois固定部20(底座21),并经由ois动力传递部34y与第二台部13连接,不会受到由第一ois驱动单元30x进行的x方向上的抖动修正的影响。即,由一个ois驱动单元30进行的ois可动部10的移动不会受另一个ois驱动单元30的结构的阻碍。因此,能够防止ois可动部10绕z轴旋转,从而能够使ois可动部10在xy平面内精度良好地摆动。
104.图8~图10是ois可动部10的分解立体图。图9示出使图8绕z轴旋转180
°
后的状态。图10是表示使图8绕z轴旋转180
°
后的状态的下方立体图。应予说明,图9是af驱动单元14和第一ois驱动单元30x被从第一台部12拆下的状态。
105.以下,在作为光学元件驱动装置1的平面形状的矩形中,将配置af驱动单元14的边
称为“第一边”,将配置第一ois驱动单元30x的边称为“第二边”,将配置第二ois驱动单元30y的边称为“第三边”,将剩余的一边称为“第四边”。
106.如图8~图10所示,在本实施方式中,ois可动部10具有af可动部11、第一台部12、第二台部13、af驱动单元14以及af支撑部15等。关于y方向上的移动,包括第一台部12和第二台部13的ois可动部10整体作为可动体,相对于此,关于x方向上的移动,第二台部13作为ois固定部20发挥功能,仅af单元(af可动部11和第一台部12)作为ois可动部10发挥功能。另外,第一台部12作为支撑af可动部11的af固定部发挥功能。
107.af可动部11是保持透镜部2(参照图2)的透镜支架,在对焦时沿光轴方向移动。af可动部11相对于第一台部12(af固定部)在径向内侧间隔开配置,并以隔着af支撑部15被向第一台部12施力的状态被支撑。
108.af可动部11例如由聚芳酯(par)、包括par在内的多种树脂材料混合而成的par合金、液晶聚合物等形成。af可动部11具有筒状的透镜容纳部111。透镜部2例如通过粘接固定于透镜容纳部111的内周面。
109.af可动部11在透镜容纳部111的外周面上具有向径向外侧突出并沿光轴方向延伸的突出部112a~112d。优选地,突出部112a~112d以光轴为基准对称地配置。在本实施方式中,以大致90
°
间隔绕着光轴设置有突出部112a~112d。突出部112a~112d突出到比透镜容纳部111的下表面更靠光轴方向成像侧的位置,并与底座21的第二底座部213抵接,由此限制af可动部11向光轴方向成像侧(下侧)的移动。在本实施方式中,突出部112a~112d在af驱动单元14未被驱动的基准状态下,与底座21的第二底座部213抵接。
110.af驱动单元14侧的突出部112a、112b与第一台部12一起将af支撑部15保持(参照图13a~图13c、图14a~图14c)。在一个突出部112a上形成有将构成af支撑部15的第一z方向基准滚珠15a容纳的第一z方向基准滚珠保持部112a。在另一个突出部112b上形成有对构成af支撑部15的第二z方向基准滚珠15b容纳的第二z方向基准滚珠保持部112b。另外,在突出部112a、112b的与第一z方向基准滚珠保持部112a、第二z方向基准滚珠保持部112b相反的一侧的面上,分别形成有将构成af支撑部15的第一预压滚珠15c、第二预压滚珠15d容纳的第一预压滚珠保持部112c、第二预压滚珠保持部112d。
111.第一z方向基准滚珠保持部112a、第二z方向基准滚珠保持部112b和第一预压滚珠保持部112c、第二预压滚珠保持部112d形成为其剖面形状呈大致v字状(锥形),其槽宽向滚珠的按压方向变窄。另外,在突出部112a、112b的光轴方向上的受光侧端部和成像侧端部,分别设置有用于防止af支撑部15脱落的受光侧阻挡器112e和成像侧阻挡器112f。
112.另外,在透镜容纳部111的外周面上设置有磁铁容纳部114,该磁铁容纳部114容纳z位置检测用的磁铁16z。磁铁16z配置在磁铁容纳部114中。在传感器基板22中,z位置检测用的磁性传感器25z配置在与磁铁16z在光轴方向上相对的位置(参照图4)。
113.另外,在af可动部11中,在突出部112a、112b之间设置有驱动单元容纳部115。作为af驱动单元14的被动器件的af动力传递部144配置在驱动单元容纳部115中。af动力传递部144是在z方向上具有规定长度的卡紧引导件,并具有在x方向上相对且向y方向(-侧)突出的侧壁。af驱动单元14的共振部141的臂部141b以扩展af动力传递部144的侧壁的方式进行抵接,af驱动单元14的动力被传递到af可动部11。在两个臂部141b与af动力传递部144的侧壁抵接时,af动力传递部144的侧壁作为板簧发挥功能,从而由共振部141的变形产生的驱
动力被有效地传递。
114.应予说明,af动力传递部144的结构可以适当且任意变更。例如,如图19a、图19b所示,也可以将在z方向上延伸的侧壁144a折弯成发夹形状并使其相对于z方向向内侧倾斜来形成板簧144b,使得向将af驱动单元14的臂部141b推回的方向产生推压力。由此,由af共振部141的变形产生的驱动力被更有效地传递到af动力传递部144。
115.在本实施方式中,af动力传递部144由与af可动部11分开的部件构成。af动力传递部144例如俯视时具有u字形状,且当侧面部在x方向上相对的状态下,底面部被固定于透镜容纳部111的外周面。af动力传递部144例如由钛铜、镍铜、不锈钢等金属材料形成。由此,与af驱动单元14的臂部141b抵接于作为树脂成型件的af可动部11的情况相比,能够有效地传递af驱动单元14的驱动力。应予说明,af动力传递部144也可以与af可动部11一体成型。
116.第一台部12隔着af支撑部15支撑af可动部11。在第一台部12的光轴方向成像侧,隔着x方向基准滚珠42a~42c配置有第二台部13。第一台部12在抖动修正时沿x方向和y方向移动,第二台部13在抖动修正时仅沿y方向移动。
117.第一台部12是在从光轴方向观察的俯视时呈大致矩形状的部件,例如由液晶聚合物形成。第一台部12在与af可动部11对应的部分具有大致圆形状的开口121。在开口121形成有与af可动部11的突出部112a~112d和磁铁容纳部114对应的切口部122。在第一台部12中,与第一ois驱动单元30x对应的部分(沿着第二边的侧壁的外侧面)形成为向径向内侧凹陷(ois电机固定部124),以使得能够配置第一ois驱动单元30x,而不会使第一ois驱动单元30x向径向外侧突出。另外,在第一台部12中,与第二ois驱动单元30y对应的部分(沿着第三边的侧壁的外侧面)也同样地形成为向径向内侧凹陷。
118.第一台部12在其下表面具有保持x方向基准滚珠42a~42c的x方向基准滚珠保持部123a~123c(参照图15b、图15c)。x方向基准滚珠保持部123a~123c形成为沿x方向延伸的矩形状的凹陷。x方向基准滚珠保持部123a~123c与第二台部13的x方向基准滚珠保持部133a~133c在z方向上相对。x方向基准滚珠保持部123a、123b形成为其剖面形状呈大致v字状(锥形),其槽宽向底面侧变窄;x方向基准滚珠保持部123c形成为大致u字状。
119.在第一台部12中,在与af可动部11的突出部112a对应的切口部122的内表面上设置有第一z方向基准滚珠保持部122a、第一预压滚珠保持部122c(参照图13a、图13b)。第一z方向基准滚珠保持部122a在与af可动部11的第一z方向基准滚珠保持部112a之间,保持第一z方向基准滚珠15a。第一预压滚珠保持部122c在与af可动部11的第一预压滚珠保持部112c之间保持第一预压滚珠15c。
120.另外,在第一台部12中,在与af可动部11的突出部112b对应的切口部122的内表面上设置有第二z方向基准滚珠保持部122b、第二预压滚珠保持部122d(参照图14a、图14b)。第二z方向基准滚珠保持部122b在与af可动部11的第二z方向基准滚珠保持部112b之间,保持第二z方向基准滚珠15b。第二预压滚珠保持部122d在与af可动部11的第二预压滚珠保持部112d之间,保持第二预压滚珠15d。
121.第一z方向基准滚珠保持部122a形成为其剖面形状呈大致v字状(锥形),其槽宽向底面侧变窄。第二z方向基准滚珠保持部122b、第一预压滚珠保持部122c及第二预压滚珠保持部122d形成为其剖面形状呈大致u字状。另外,在第一z方向基准滚珠保持部122a和第一预压滚珠保持部122c的光轴方向上的受光侧端部和成像侧端部、以及第二z方向基准滚珠
保持部122b和第二预压滚珠保持部122d的光轴方向上的受光侧端部和成像侧端部,分别设置有用于防止af支撑部15脱落的受光侧阻挡器112e和成像侧阻挡器112f。
122.在第一台部12中,在沿着x方向的一个侧壁(沿着第一边的侧壁)上形成有用于配置作为af驱动单元14的主动器件的af共振部141等的af电机固定部125。af电机固定部125具有上部固定板(省略附图标记)和下部固定板125a,在它们之间夹持af共振部141。af共振部141例如插入到在上部固定板和下部固定板125a上所设置的插入孔(省略附图标记),并通过粘接被固定。上部固定板由配线17b的一部分构成,af共振部141与配线17b电连接。
123.在第一台部12中,在沿着y方向的一个侧壁(沿着第四边的侧壁)上设置有xy位置检测用的磁铁16x、16y。例如,磁铁16x在x方向上被磁化,磁铁16y在y方向上被磁化。在传感器基板22中,xy位置检测用的磁性传感器25x、25y配置在与磁铁16x、16y在光轴方向上相对的位置(参照图4)。
124.另外,在第一台部12中,例如通过嵌件成型而埋设有配线17a、17b。配线17a、17b例如沿着第一边和第二边配置。配线17a、17b从第一台部12的四角露出,在该部分连接着ois用施力部件50的一端。通过配线17a来进行对第一ois驱动单元30x的供电,且通过配线17b来进行对af驱动单元14的供电。
125.第二台部13是在从光轴方向观察的俯视时呈大致矩形状的部件,例如由液晶聚合物形成。第二台部13的内周面131与af可动部11的外形对应地形成。在第二台部13中,与第一ois驱动单元30x和第二ois驱动单元30y对应的部分(沿着第二边和第三边的侧壁的外侧面)与第一台部12同样地,形成为向径向内侧凹陷。
126.第二台部13在其下表面具有容纳y方向基准滚珠41a~41c的y方向基准滚珠保持部134a~134c(参照图16a、图16b)。y方向基准滚珠保持部134a~134c形成为沿y方向延伸的矩形状的凹陷。y方向基准滚珠保持部134a~134c与底座21的y方向基准滚珠保持部217a~217c在z方向上相对。y方向基准滚珠保持部134a、134b形成为其剖面形状呈大致v字状(锥形),其槽宽向底面侧变窄;y方向基准滚珠保持部134c形成为大致u字状。
127.另外,第二台部13在其上表面具有容纳x方向基准滚珠42a~42c的x方向基准滚珠保持部133a~133c(参照图15a~图15c)。x方向基准滚珠保持部133a~133c形成为沿x方向延伸的矩形状的凹陷。x方向基准滚珠保持部133a~133c与第一台部12的x方向基准滚珠保持部123a~123c在z方向上相对。x方向基准滚珠保持部133a~133c形成为其剖面形状呈大致v字状(锥形),其槽宽向底面侧变窄。在本实施方式中,x方向基准滚珠保持部133a、133b设置于第二台部13的配置第一ois驱动单元30x的边(第二边),x方向基准滚珠保持部133c设置于配置af驱动单元14的边(第一边),并且由x方向基准滚珠42a~42c以三点支撑第一台部12。
128.构成ois支撑部40的y方向基准滚珠41a~41c被底座21的y方向基准滚珠保持部217a~217c和第二台部13的y方向基准滚珠保持部134a~134c以多点接触的方式夹持。因此,y方向基准滚珠41a~41c稳定地在y方向上滚动。
129.另外,x方向基准滚珠42a~42c被第二台部13的x方向基准滚珠保持部133a~133c和第一台部12的x方向基准滚珠保持部123a~123c以多点接触的方式夹持。因此,x方向基准滚珠42a~42c稳定地在x方向上滚动。
130.af支撑部15是相对于第一台部12(af固定部)支撑af可动部11的部分。如图13a~
图13c和图14a~图14c所示,af支撑部15由第一z方向基准滚珠15a、第二z方向基准滚珠15b、第一预压滚珠15c及第二预压滚珠15d构成。在本实施方式中,第一z方向基准滚珠15a、第二z方向基准滚珠15b、第一预压滚珠15c、第二预压滚珠15d分别由在z方向上排列配置的多个滚珠(在此,三个)构成。
131.第一z方向基准滚珠15a以可滚动的状态介于af可动部11和第一台部12的第一z方向基准滚珠保持部112a、122a之间。第二z方向基准滚珠15b以可滚动的状态介于af可动部11和第一台部12的第二z方向基准滚珠保持部112b、122b之间。第一预压滚珠15c以可滚动的状态介于af可动部11和第一台部12的第一预压滚珠保持部112c、122c之间。第二预压滚珠15d以可滚动的状态介于af可动部11和第一台部12的第二预压滚珠保持部112d、122d之间。
132.在第一z方向基准滚珠15a、第二z方向基准滚珠15b、第一预压滚珠15c、第二预压滚珠15d中,只要至少上下两个滚珠被af可动部11和第一台部12夹持即可。即,中间的滚珠是为了确保上下两个滚珠之间的间隔距离而设置的,其直径可以比上下两个滚珠小。
133.另外,如图20所示,在第二z方向基准滚珠15b中,中间的滚珠的直径也可以比上下两个滚珠的直径大。在该情况下,第一z方向基准滚珠15a中的两个直径较大的滚珠和第二z方向基准滚珠15b中的一个直径较大的滚珠与af可动部10抵接,作为af支撑部15发挥功能。因此,由这些三个滚珠以三点支撑af可动部11,从而af可动部11以更稳定的姿势被保持。
134.另外,如图13a所示,在第一预压滚珠15c与第一台部12的第一预压滚珠保持部122c之间配置有对af可动部11施力的施力部18。同样地,如图14a所示,在第二预压滚珠15d与第一台部12的第二预压滚珠保持部122d之间配置有对af可动部11施力的施力部18。af可动部11在隔着第一z方向基准滚珠15a、第二z方向基准滚珠15b、第一预压滚珠15c及第二预压滚珠15d被施力的状态下支撑于第一台部12,并以稳定的姿势被保持。
135.施力部18例如具有由金属材料形成的板簧181(施力部件)和由摩擦系数较小的陶瓷材料形成的间隔件182(干涉部件)。在第一台部12侧配置板簧181,并在af可动部11侧配置间隔件182。通过使陶瓷制的间隔件182介于板簧181与第一预压滚珠15c、第二预压滚珠15d之间,能够使滚珠顺畅滚动,并且耐久性也提高。应予说明,对于间隔件182的材质,只要能够使滚珠顺畅滚动的材质即可,不限于摩擦系数较小的陶瓷材料,例如也可以是铜合金和不锈钢等具有适当的摩擦系数的材料。
136.af驱动单元14是使af可动部11在z方向上移动的致动器。af驱动单元14与ois驱动单元30同样地由超声电机构成。af驱动单元14以使臂部141b沿z方向延伸的方式,固定于第一台部12的af电机固定部125。
137.af驱动单元14的结构如图11a、图11b所示。图11a表示af驱动单元14的各部件组装后的状态,图11b表示将af驱动单元14的各部件分解后的状态。af驱动单元14的结构与ois驱动单元30几乎相同。
138.如图11a、图11b所示,af驱动单元14具有af共振部141、af压电元件142、af电极143及af动力传递部144。af驱动单元14的驱动力经由af动力传递部144传递到af可动部11。即,在af驱动单元14中,af共振部141构成主动器件,af动力传递部144构成被动器件。
139.af压电元件142例如是由陶瓷材料形成的板状元件,通过施加高频电压而产生振动。以将af共振部141的躯干部141a夹入的方式配置两张af压电元件142。
140.af电极143将af共振部141和af压电元件142夹持,对af压电元件142施加电压。
141.af共振部141由导电材料形成,与af压电元件142的振动共振,将振动运动转换为直线运动。af共振部141例如通过金属板的激光加工、蚀刻加工或冲压加工等形成。在本实施方式中,af共振部141具有:被af压电元件142夹持的大致矩形状的躯干部141a、从躯干部141a沿z方向延伸的两个臂部141b、从躯干部141a的中央部沿z方向延伸并与供电路径(第一台部12的配线17b(上部固定板))电连接的通电部141c以及从躯干部141a的中央部向与通电部141c相反的一侧延伸的台部固定部141d。两个臂部141b具有对称的形状,与af压电元件142的振动共振而对称地变形。af驱动单元14配置为,两个臂部141b沿z方向延伸,其自由端部由af动力传递部144夹持。
142.af压电元件142从厚度方向贴合于af共振部141的躯干部141a,并被af电极143夹持,从而它们彼此电连接。通过将af共振部141的通电部141c和af电极143与第一台部12的配线17b连接,电压被施加到af压电元件142,从而产生振动。
143.af共振部141与ois共振部31同样地,至少具有两个共振频率,相对于各个共振频率,以不同的动作变形。换言之,以相对于两个共振频率而以不同的动作变形的方式,对af共振部141的整体形状进行设定。
144.在光学元件驱动装置1中,当对af驱动单元14施加电压时,af压电元件142振动,且af共振部141以与频率相应的动作变形。af驱动单元14的驱动力使af动力传递部144在z方向上滑动。伴随于此,af可动部11在z方向上移动,从而进行对焦。由于af支撑部15由滚珠构成,af可动部11能够顺畅地在z方向上移动。另外,af驱动单元14与af动力传递部144仅是在被施力的状态下相互抵接,因此,只要将抵接部分在z方向上增大,就能够使af可动部11的移动行程容易变长,而不会影响光学元件驱动装置1的低高度化。
145.在光学元件驱动装置1中,当对ois驱动单元30施加电压时,ois压电元件32振动,且ois共振部31以与频率相应的动作变形。ois驱动单元30的驱动力使ois动力传递部34在x方向或y方向上滑动。伴随于此,ois可动部10在x方向或y方向上移动,从而进行抖动修正。由于ois支撑部40由滚珠构成,ois可动部10能够顺畅地在x方向或y方向上移动。
146.具体而言,在第一ois驱动单元30x被驱动,ois动力传递部34在x方向上移动的情况下,从配置有第一ois驱动单元30x的第一台部12向第二台部13传递动力。此时,由第二台部13和底座21夹持的滚珠41不能在x方向上滚动,因此,第二台部13相对于底座21的x方向上的位置保持不变。另一方面,由第一台部12和第二台部13夹持的滚珠42能够在x方向上滚动,因此第一台部12相对于第二台部13在x方向上移动。也就是说,第二台部13构成ois固定部20,第一台部12构成ois可动部10。
147.另外,在第二ois驱动单元30y被驱动,ois动力传递部34在y方向上移动的情况下,从配置有第二ois驱动单元30y的底座21向第二台部13传递动力。此时,由第一台部12和第二台部13夹持的滚珠42不能在y方向上滚动,因此,第一台部12相对于第二台部的y方向上的位置保持不变。另一方面,由第二台部13和底座21夹持的滚珠41能够在y方向上滚动,因此,第二台部13相对于底座21在y方向上移动。第一台部12也跟随第二台部13在y方向上移动。也就是说,底座21构成ois固定部20,包括第一台部12和第二台部13的af单元构成ois可动部10。
148.这样,ois可动部10在xy平面内摆动,从而进行抖动修正。具体而言,以使摄像机模
块a的角度抖动得到抵消的方式,基于来自抖动检测部(例如陀螺仪传感器,省略图示)的表示角度抖动的检测信号,控制对ois驱动单元30x、30y的通电电压。此时,通过反馈由磁铁16x、16y及磁性传感器25x、25y构成的xy位置检测部的检测结果,能够准确控制ois可动部10的平移移动。
149.图12是表示af可动部和ois可动部移动时的基准轴的图。图12是从光轴方向受光侧观察拆下罩24后的光学元件驱动装置1的俯视图。
150.如图12所示,在光学元件驱动装置1中,af可动部11沿第一z方向基准轴z1和第二z方向基准轴z2移动。第一z方向基准轴z1是第一z方向基准滚珠15a的滚动轴,第二z方向基准轴z2是第二z方向基准滚珠15b的滚动轴。
151.图13a、图13b中示出第一z方向基准轴z1,图14a、图14b中示出第二z方向基准轴z2。图13a、图13b是配置有第一z方向基准滚珠15a的af可动部11的突出部112a周边的纵剖面图和横剖面图,图14a、图14b是配置有第二z方向基准滚珠15b的af可动部11的突出部112b周边的纵剖面图和横剖面图。应予说明,图13b、图14b中,将结构简化示出。
152.如图13a、图13b所示,第一z方向基准滚珠15a被af可动部11和第一台部12的第一z方向基准滚珠保持部112a、122a夹持,其在光轴正交方向上的移动(af可动部11的旋转)受到限制。由此,能够使af可动部11以稳定的动作在光轴方向上移动。
153.另一方面,如图14a、图14b所示,第二z方向基准滚珠15b被af可动部11和第一台部12的第二z方向基准滚珠保持部112b、122b夹持,被允许在光轴正交方向上移动。由此,能够吸收af可动部11和第一台部12的尺寸公差,并且能够提高af可动部11移动时的稳定性。
154.在本实施方式中,第一z方向基准轴z1和第二z方向基准轴z2以af可动部11的圆形的开口118的中心o为基准,设置于作为驱动力产生源的af驱动单元14侧,af驱动单元14在周向上位于第一z方向基准轴z1(第一z方向基准滚珠15a)和第二z方向基准轴z2(第二z方向基准滚珠15b)之间。也就是说,在从光轴方向观察的俯视时,af支撑部15和af驱动单元14配置于光学元件驱动装置1的两个半侧中的同一半侧。“两个半侧中的同一半侧”是指,当以通过af可动部11的开口118的中心o的基准线rl为边界时的同一侧。
155.通过使af驱动单元14与第一z方向基准轴z1和第二z方向基准轴z即af驱动单元14与af支撑部15的位置接近,相对于支撑位置的旋转力矩受到限制,因此,af可动部11的移动动作得到稳定。例如,即使在产生某些摩擦阻力的情况下,af可动部11也不易产生倾斜,能够使其在光轴方向上笔直地移动。
156.优选地,第一z方向基准轴z1和第二z方向基准轴z2的各自与af可动部11的开口118的中心o所成的角度θ为45
°
~180
°
。更优选地,第一z方向基准轴z1和第二z方向基准轴z2以af驱动单元14为基准对称地配置。由此,能够进一步提高af可动部11的移动动作的稳定性。
157.另外,在本实施方式中,第一z方向基准滚珠15a和第二z方向基准滚珠15b(以下称为“z方向基准滚珠15a、15b”)伴随af可动部11的移动而不打滑地滚动。
158.即,在基准状态下,af可动部11的成像侧阻挡器112f比第一台部12的成像侧阻挡器122f位于更靠光轴方向成像侧的位置,从z方向基准滚珠15a、15b的下端(以下,称为“滚珠下端”)间隔开。af可动部11的成像侧阻挡器112f与滚珠下端之间的间隔距离被设定得比af可动部11的移动行程的最大值大。
159.另外,第一台部12的受光侧阻挡器122e从z方向基准滚珠15a、15b的上端(以下,称为“滚珠上端”)间隔开。第一台部12的受光侧阻挡器122e与滚珠上端之间的间隔距离被设定得比伴随af可动部11的移动的z方向基准滚珠15a、15b的移动位移的最大值(小于af可动部11的最大移动行程)大。
160.z方向基准滚珠15a、15b在基准状态下,例如被af可动部11的受光侧阻挡器112e和第一台部12的成像侧阻挡器122f夹持。
161.由此,在af可动部11移动时,af可动部11的成像侧阻挡器112f不会到达滚珠下端,第一z方向基准滚珠15a和第二z方向基准滚珠15b不打滑地滚动。af可动部11和第一台部12与z方向基准滚珠15a、15b之间的摩擦不是滑动摩擦而是滚动摩擦,af可动部11会顺畅地移动,因此,能够进一步提高af可动部11的移动动作的稳定性。另外,通过设置受光侧阻挡器112e、122e和成像侧阻挡器112f、122f,能够抑制粉尘等异物的侵入,进而能够防止z方向基准滚珠15a、15b的滚动被异物阻碍。
162.第一台部12的受光侧阻挡器122e例如由滑盖19形成(参照图18a、图18b)。图18a示出安装有滑盖19的状态,图18b示出将滑盖19拆下后的状态。
163.如图18b所示,滑盖19在滑动方向的两侧具有突出长度不同的突出片19a、19b。另一方面,在第一台部12中,将第一z方向基准滚珠15a及第一预压滚珠15c、第二z方向基准滚珠15b及第二预压滚珠15d容纳的滚珠容纳部(省略附图标记)的光轴方向受光侧是开放的,在开放端部设置有凹部126。
164.当以使突出长度较长的突出片19a插入在凹部123的滑动方向上的一端所设置的插入孔126a的方式将滑盖19配置后,以使突出长度较短的突出片19b插入在凹部123的另一端所设置的插入孔126b的方式使滑盖19滑动。滑盖19的突出片19a、19b与凹部126的插入孔126a、126b卡合,滑盖19将滚珠容纳部的光轴方向受光侧封闭。应予说明,虽然未图示,但例如也可以构成为,在凹部126和滑盖19的各自的抵接面设置凹凸结构,使得在规定位置以不能滑动的方式锁定。
165.这样,通过使用滑盖19形成第一台部12的受光侧阻挡器122e,能够以在af可动部11的突出部112a、112b配置了第一z方向基准滚珠15a和第二z方向基准滚珠15b以及第一预压滚珠15c和第二预压滚珠15d的状态,从第一台部12的光轴方向受光侧插入af可动部11,因此可提高组装时的作业性。
166.如图12所示,在光学元件驱动装置1中,ois可动部10(仅af单元)沿着第一x方向基准轴x1和第二x方向基准轴x2移动。第一x方向基准轴x1是x方向基准滚珠42a、42b的滚动轴,第二x方向基准轴x2是x方向基准滚珠42c的滚动轴。应予说明,第一x方向基准轴x1既可以如本实施方式那样是多个(第一x方向基准轴x11、x12),也可以是一个。关于第二x方向基准轴x2也相同。
167.图15a~图15c中示出x方向基准轴x1、x2。图15a是从光轴方向受光侧观察拆下af可动部11和第一台部12后的光学元件驱动装置1的俯视图。图15b是x方向基准滚珠保持部133a、133b的沿着y方向的纵剖面,图15c是x方向基准滚珠保持部133c的沿着y方向的纵剖面。应予说明,图15b、图15c中,将结构简化示出。
168.如图15b所示,x方向基准滚珠42a、42b被第二台部13的x方向基准滚珠保持部133a、133b和第一台部12的x方向基准滚珠保持部123a、123b夹持,y方向上的移动受到限
制。由此,能够使oia可动部10(af可动部11和第一台部12)以稳定的动作在x方向上移动。
169.另一方面,如图15c所示,x方向基准滚珠42c被第二台部13和第一台部12的x方向基准滚珠保持部133c、123c允许在y方向上移动。由此,能够吸收第二台部13和第一台部12的尺寸公差,并且能够提高ois可动部10在x方向上移动时的稳定性。
170.应予说明,由ois用施力部件50对x方向基准滚珠42a~42c施加了z方向上的预压。
171.在本实施方式中,第一x方向基准轴x1(x11、x12)以af可动部11的圆形的开口118的中心o为基准,设置于作为驱动力产生源的第一ois驱动单元30x侧。由此,抑制了绕光轴方向旋转的力矩,从而ois可动部10的x方向上的移动动作得到稳定。
172.另外,在本实施方式中,由以包围af可动部11的圆形的开口118的中心o的方式配置的x方向基准滚珠42a~42c将ois可动部10(第一台部12)以三点支撑于ois固定部20(第二台部13)。由此,即使在零件产生翘曲等,第一台部12也可靠地与x方向基准滚珠42a~42c接触,使得第一台部12的姿势稳定。
173.如图12所示,在光学元件驱动装置1中,ois可动部10(af单元和第二台部13)沿第一y方向基准轴y1和第二y方向基准轴y2移动。第一y方向基准轴y1是y方向基准滚珠41a、41b的滚动轴,第二y方向基准轴y2是y方向基准滚珠41c的滚动轴。应予说明,第一y方向基准轴y1如本实施方式那样既可以是一个,也可以是多个。关于第二y方向基准轴y2也相同。
174.图16a~图16c中示出y方向基准轴y1、y2。图16a是从光轴方向受光侧观察将af可动部11、第一台部12及第二台部13拆下后的光学元件驱动装置1(主要是底座21)的俯视图。图16b是y方向基准滚珠保持部217a、217b的沿着x方向的纵剖面,图16c是y方向基准滚珠保持部217c的沿着x方向的纵剖面。应予说明,图16b、图16c中,将结构简化示出。
175.如图16b所示,y方向基准滚珠41a、41b被底座21的y方向基准滚珠保持部217a、217b和第二台部13的y方向基准滚珠保持部134a、134b夹持,x方向上的移动受到限制。由此,能够使oia可动部10(af可动部11、第一台部12及第二台部13)以稳定的动作在y方向上移动。
176.另一方面,如图16c所示,y方向基准滚珠41c被底座21和第二台部13的y方向基准滚珠保持部217c、134c允许在x方向上移动。由此,能够吸收底座21和第二台部13的尺寸公差,并且能够提高ois可动部10在y方向上移动时的稳定性。
177.应予说明,由ois用施力部件50对x方向基准滚珠42a~42c施加了z方向上的预压。
178.在本实施方式中,第一y方向基准轴y1以af可动部11的圆形的开口118的中心o为基准,设置于作为驱动力产生源的第二ois驱动单元30y侧。由此,抑制了绕光轴方向旋转的力矩,ois可动部10的y方向上的移动动作得到稳定。
179.另外,在本实施方式中,由以包围af可动部11的圆形的开口118的中心o的方式配置的y方向基准滚珠41a~42c将ois可动部10(第二台部13)以三点支撑于ois固定部20(底座21)。由此,即使在零件产生翘曲等,第二台部13也可靠地与y方向基准滚珠41a~41c接触,使得第二台部13的姿势稳定。
180.这样,实施方式的光学元件驱动装置1具备第一台部12(第一固定部)、配置于第一台部12的径向内侧的af可动部11(第一可动部)、相对于第一台部12支撑af可动部11的af支撑部15(第一支撑部)以及配置于第一台部12且使af可动部11相对于第一台部12在光轴方向上移动的af驱动单元14(z方向驱动部),且该光学元件驱动装置1在从光轴方向观察的俯
视形状为矩形状。
181.af驱动单元14由将振动运动转换为直线运动的超声电机构成,配置于矩形的第一边,以向af可动部11传递直线运动。
182.af支撑部15具有第一z方向基准滚珠15a(第一基准滚珠)和第二z方向基准滚珠15b(第二基准滚珠)、以及隔着第一z方向基准滚珠15a和第二z方向基准滚珠15b将af可动部11向第一台部12施力的板簧181(第一施力部件和第二施力部件)。
183.af可动部11和第一台部12在比af可动部11的圆形的开口118的中心o靠第一边侧的位置具有沿着光轴方向形成且分别将第一z方向基准滚珠15a和第二z方向基准滚珠15b容纳的第一z方向基准滚珠保持部112a、122a(第一基准滚珠保持部)和第二z方向基准滚珠保持部112b、122b(第二基准滚珠保持部),af驱动单元14在周向上位于第一z方向基准滚珠15a与第二z方向基准滚珠15b之间。
184.另外,在光学元件驱动装置1中,施力部18具有对af支撑部15施力的板簧181(弹性部件)、以及配置于板簧181与af支撑部15之间的间隔件182。
185.另外,在光学元件驱动装置1中,af驱动单元14(z方向驱动部)在与光轴方向正交的平面上呈直线状延伸,在从光轴方向观察的俯视时,af支撑部15(第一支撑部)和af驱动单元14配置于与光学元件驱动装置1的两个半侧中的同一半侧。
186.另外,光学元件驱动装置1具备:ois固定部20(第二固定部);ois可动部10(第二可动部),具有第一台部12(第一固定部)、af可动部11(第一可动部)及af支撑部15(第一支撑部),且相对于ois固定部20在光轴方向上间隔开配置;以及ois驱动单元30(xy方向驱动部),具有将振动转换成直线运动的超声电机,通过直线运动使ois可动部10在与所述光轴方向正交的方向上移动。af驱动单元14(z方向驱动部)配置于与光轴方向正交的平面上的沿着第一边的区域(第一直线区域),ois驱动单元30(xy方向驱动部)配置于沿着与第一边正交的第二边的区域(第二直线区域)和沿着与第一边平行的第三边的区域(第三直线区域)。
187.另外,光学元件驱动装置1具备安装有磁性传感器25x、25y、25z(检测传感器)的传感器基板22,该磁性传感器25x、25y、25z用于检测af可动部11(第一可动部)在光轴方向上的位置和ois可动部10(第二可动部)在与光轴正交的方向上的位置。传感器基板22配置于第一直线区域~第三直线区域以外的区域。
188.根据光学元件驱动装置1,由于af驱动单元14由超声电机构成,能够减少外部磁性的影响,并且能够实现小型化和低高度化。
189.另外,由于af驱动单元14的臂部141b沿光轴方向延伸并被af动力传递部144夹持,af驱动单元14的驱动力被最大程度地传递到af可动部11,因此,能够有效地得到使af可动部11移动的驱动力。而且,通过使af驱动单元14与af支撑部15的位置接近,可抑制相对于支撑位置的旋转力矩,因此,af可动部11的移动动作得到稳定。因此,光学元件驱动装置1的驱动性能会明显提高。
190.即使如智能手机m那样使具有光学元件驱动装置1的摄像机模块a彼此靠近地配置,也不会有磁性上的影响,因此,极为适合用于双镜头摄像机。
191.[变形例1]
[0192]
如在实施方式中所述,af驱动单元14的af动力传递部144(被动器件)的结构可以
适当且任意变更。在实施方式中,如图19a、图19b所示,af动力传递部144具有板簧144b,通过其自身的施力功能,保持af共振部141与af动力传递部144的抵接状态。在该情况下,伴随af可动部11在光轴方向上的移动,板簧144b的施力载荷发生变化。例如,若af可动部11向光轴方向成像侧位移,则板簧144b的施力载荷变大,相反地,若af可动部11向光轴方向受光侧位移,则板簧144b的施力载荷变小。因此,为了从af共振部141向af动力传递部144传递规定动力,需要采取提高板簧144b的刚性等措施。变形例1中改进为,使得af动力传递部相对于af共振部141的施力载荷与af可动部11位移无关地保持恒定。
[0193]
变形例1的af驱动单元14的结构如图21、图22及图23a~图23c所示。图21是变形例1的af驱动单元14的立体图。图22是变形例1的af驱动单元14的分解立体图。图23a是变形例1的af驱动单元14的顶视图,图23b是侧视图,图23c是图23a的a-a向视剖视图。
[0194]
如图21等所示,变形例1的af驱动单元14与实施方式同样地,配置于af可动部11的驱动单元容纳部115。在af可动部11中,隔着驱动单元容纳部115设置有向径向外侧膨出的板容纳部116。
[0195]
af驱动单元14的主动侧的结构(af共振部141等)与实施方式相同。在变形例1中,不同之处在于板61介于af共振部141与施力部件62之间,来自af共振部141的动力经由板61传递到af可动部11。即,在变形例1中,两个板61作为af驱动单元14的被动器件即af动力传递部144发挥功能。
[0196]
板61例如是由钛铜、镍铜、不锈钢等金属材料构成的硬质的板状部件。板61以其主面与af共振部141的臂部141b抵接的方式,沿移动方向配置于af可动部11,且能够与af可动部11一体地移动。在变形例1中,板61配置于af可动部11的板容纳部116,并被物理卡止。具体而言,通过使导向插入部611松动地嵌合于在af可动部11所设置的导向槽116a并且将固定片612配置于凹部116c的底面与卡止片116b之间,来将板61固定于af可动部11。
[0197]
板61以能够跟随af共振部141的安装状态(安装位置的个体差异)的方式被固定于af可动部11即可,可以不被粘接,也可以通过能够弹性变形的软质粘接剂(例如硅橡胶)被粘接。
[0198]
施力部件62是用于将板61向af共振部141的臂部141b施力的部件,具有两个弹簧部621。弹簧部621构成为以相同的推压力向臂部141b按压板61。
[0199]
在变形例1中,施力部件62例如通过板金加工形成,弹簧部621由从连结部622延伸的板簧构成。具体而言,弹簧部621的板簧从连结部622的下部向z方向-侧延伸,并向外侧折弯成发夹形状,并且相对于z方向向内侧倾斜而形成。
[0200]
施力部件62通过将连结部622载置于驱动单元容纳部115所设置的弹簧载置部115a,并且将弹簧部621配置于板容纳部116的凹部116c,从而固定于af可动部11。板61位于施力部件62的发夹形部位,并被弹簧部621向内侧(臂部141b侧)施力。在变形例1中,施力部件62未粘接于af可动部11,以使得能够跟随af驱动单元14的安装位置。即,施力部件62能够沿驱动单元容纳部115的安装面移动,被保持于在将af驱动单元14(af共振部141和板61)夹持时,两个弹簧部621的施力载荷均等的位置。
[0201]
应予说明,施力部件62的结构是一例,可以适当变更。例如,也可以应用图19a等所示的af动力传递部144的结构。另外,也可以应用螺旋弹簧和硬质橡胶等弹性体。
[0202]
这样,在变形例1中,af驱动单元14(z方向驱动部)具有:af压电元件142,通过施加
电压而产生振动;af共振部141(主动器件),与af压电元件142的振动共振并将该振动转换为直线运动;af动力传递部144(被动器件),配置于af可动部11(第一可动部),在af共振部141的直线运动下相对于af共振部141相对地移动;以及施力部件62(第二施力部),配置于af可动部11,将af动力传递部144向af共振部141施力,af动力传递部144由与af共振部141抵接的板61构成。具体而言,af动力传递部144与af共振部141的两个臂部141b接触,接受臂部141b的动力并相对于af共振部141相对地移动。施力部件62将af动力传递部144向臂部141b施力。af动力传递部144由沿移动方向配置于af可动部11,并与各个臂部141b抵接的两个板61构成,各个板61被施力部件62向臂部141b施力。
[0203]
由此,施力部件62将板61以相同的推压力向臂部141b按压,从而,即使af可动部11在光轴方向上移动,作为主动器件的af共振部141的臂部141b与作为被动器件的板61的施力状态(施力载荷)也不变动。因此,与如实施方式那样af动力传递部144兼具弹簧功能的情况相比,能够将来自af共振部141的动力经由板61稳定地传递到af可动部11。
[0204]
另外,在如实施方式那样af动力传递部144兼具弹簧功能的情况下,难以应用刚性较高的材质,但在变形例1中,可容易提高板61的刚性。另外,与实施方式相比,从af共振部141向af可动部11的动力传递路径短。因此,能够提高从af共振部141向af可动部11的动力传递效率。
[0205]
此外,由于板61具有平坦的表面,能够适当地进行任意的表面处理。例如,当在表面形成了类金刚石碳(dlc)、陶瓷等涂层的情况下,耐磨性会明显提高。
[0206]
另外,在变形例1的af驱动单元14中,af动力传递部144(被动器件)具有两个板61,施力部件62具有对各个板61施力的两个弹簧部621,af共振部141(主动器件)和板61(被动器件)被弹簧部621夹持。
[0207]
由此,af驱动单元14在两个弹簧部621的推压力均衡的状态下被保持,因此,能够容易地对左右的板61施加均匀的推压力。
[0208]
另外,施力部件62由一个部件构成,以能够跟随af驱动单元14的安装状态的方式,配置于af可动部11。
[0209]
从而,可根据af驱动单元14的安装状态容易地进行跟随和调心,因此,动作的稳定性会进一步提高。
[0210]
如图24a、图24b所示,上述af驱动单元14的结构也可以应用于ois驱动单元30。图24a、图4b中,施力部件62由简单的、剖面为u字状的部件构成。板61被固定于第二台部13。即,通过应用板61与施力部件62的组合来代替实施方式的ois动力传递部34,能够容易地应对长行程,使得动作的稳定性提高。
[0211]
[变形例2]
[0212]
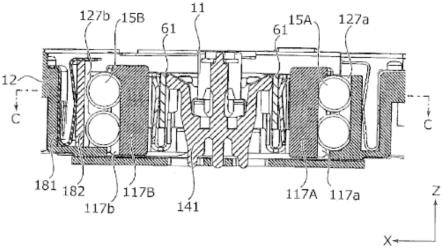
图25是从光轴方向受光侧观察变形例2的ois可动部10的俯视图。图26是变形例2的ois可动部10的分解立体图。应予说明,图25、图26中,省略了第二台部13。图27a、图27b是变形例2的af可动部11和第一台部12的俯视图。图28a、图28b是变形例2的ois可动部10的横剖面和纵剖面的放大图。图28a是图28b的c-c向视剖视图,图28b是图25的b-b向视剖视图。图29a、图29b是表示af支撑部15的配置的放大图。
[0213]
应予说明,关于与实施方式和变形例1所示的光学元件驱动装置1相同或对应的构成要素,标以相同的附图标记,并省略其说明。
[0214]
如图25等所示,在变形例2中,af可动部11在透镜容纳部111的周面部具有向第一台部12突出的突出部112c、112d、117a、117b。突出部112c、112d与实施方式相同。突出部117a、117b以在x方向上相对的方式配置,形成一个在透镜容纳部111的切线方向(在此,x方向)延伸的空间。
[0215]
突出部117a、117b与第一台部12一起保持作为af支撑部15的z方向基准滚珠15a、15b。在一个突出部117a形成有容纳第一z方向基准滚珠15a的第一z方向基准滚珠保持部117a。在另一个突出部117b形成有容纳第二z方向基准滚珠15b的第二z方向基准滚珠保持部117b。第一z方向基准滚珠保持部117a和第二z方向基准滚珠保持部117b形成为其剖面形状呈大致v字状(锥形),其槽宽向槽底变窄。
[0216]
另外,在af可动部11中,由突出部117a、117b形成的空间成为配置af驱动单元14的驱动单元容纳部115。af驱动单元14的保持结构例如与变形例1相同。即,作为af驱动单元14的被动器件的板61介于af共振部141与施力部件62之间。af驱动单元14被夹持在两个板61之间,来自af共振部141的动力经由板61传递到af可动部11。
[0217]
在变形例2中,突出部117a、117b兼具实施方式中的突出部112a、112b的将z方向基准滚珠15a、15b容纳的功能、和变形例1中的板容纳部116的将板61容纳的功能。
[0218]
在第一台部12中,与af可动部11的突出部117a、117b和夹在它们之间的空间对应的部分被切除,而形成了af电机固定部125。另外,在af电机固定部125的两侧,连续地设置有第一z方向基准滚珠保持部127a和第二z方向基准滚珠保持部127b。
[0219]
第一z方向基准滚珠保持部127a沿着透镜容纳部111的切线方向d1形成(参照图29a)。另外,第一z方向基准滚珠保持部127a的内表面(af电机固定部125侧的面)形成为其剖面形状呈大致v字状(锥形),其槽宽向槽底变窄。
[0220]
第二z方向基准滚珠保持部127b相对于透镜容纳部111的切线方向d1倾斜地形成(参照图29b)。另外,第二z方向基准滚珠保持部127b的内表面(af电机固定部125侧的面)形成为其剖面形状呈大致u字状。在第二z方向基准滚珠保持部127b配置有第二z方向基准滚珠15b以及用于隔着第二z方向基准滚珠15b对af可动部11施力的施力部18(板簧181和间隔件182)。应予说明,在图27b中,示出将板簧181拆下后的状态。
[0221]
第二z方向基准滚珠15b被相对于透镜容纳部111的切线方向d1倾斜地施力(参照图29b)。由此,af可动部11隔着第二z方向基准滚珠15b在正交的两个方向即x方向和y方向上被按压,以稳定的姿势被保持在光轴正交面内。在将切线方向d1与施力方向d2所成的角度设为θ,将板簧181的预压设为f的情况下,y方向的按压力为f1=f
·
sinθ,x方向的按压力为f2=f
·
cosθ。
[0222]
在此,切线方向d1与施力方向d2所成的角度θ例如是0
°
~45
°
(不包括0
°
)。施力方向d2例如为了与预压f之间保持平衡,以限制af可动部11的绕光轴的旋转的方式被设定。例如,若使施力方向d2与切线方向d1所成的角度θ增大,则y方向上的按压力变大,因此,能够减小板簧181的预压f,但在空间方面较为不利,例如需要增大突出部117a、117b的突出长度。相反地,若减小施力方向d2与切线方向d1所成的角度θ,则在空间方面较为有利,但y方向的按压力变小,因此需要增大板簧181的预压。
[0223]
第一z方向基准滚珠15a以能够滚动的状态保持于af可动部11和第一台部12的第一z方向基准滚珠保持部117a、127a之间。另外,第二z方向基准滚珠15b以能够滚动的状态
保持于在第一台部12的第二z方向基准滚珠保持部127b所配置的间隔件182和af可动部11的第二z方向基准滚珠保持部117b之间。af可动部11在隔着第一z方向基准滚珠15a和第二z方向基准滚珠15b被施力的状态下支撑于第一台部12,并以稳定的姿势被保持。在变形例2中,第二z方向基准滚珠15b还作为预压滚珠发挥功能。
[0224]
第一z方向基准滚珠15a被af可动部11和第一台部12夹持,其在光轴正交方向上的移动(af可动部11的旋转)受到限制。由此,能够使af可动部11以稳定的动作在光轴方向上移动。
[0225]
另一方面,第二z方向基准滚珠15b隔着板簧181和间隔件182被af可动部11和第一台部12夹持,被允许在光轴正交方向上移动。由此,能够吸收af可动部11和第一台部12的尺寸公差,并且af可动部11移动时的稳定性会提高。
[0226]
另外,第一z方向基准滚珠15a和第二z方向基准滚珠15b分别由两个滚珠构成,其直径设定得比实施方式和变形例1的直径大。在该情况下,与实施方式和变形例1相比,第一z方向基准滚珠15a和第二z方向基准滚珠15b的滚动阻力变小。
[0227]
这样,在变形例2中,相对于第一台部12(固定部)支撑af可动部11(可动部)的af支撑部15具有第一z方向基准滚珠15a(第一基准滚珠)、第二z方向基准滚珠15b(第二基准滚珠)以及隔着第二z方向基准滚珠15b将af可动部11向第一台部12施力的板簧181(施力部件)。af可动部11具有:圆筒状的透镜容纳部111(周面部);以及突出部117a、117b(第一突出部和第二突出部),以向第一台部12突出的方式设置于透镜容纳部111,且形成一个在x方向(透镜容纳部111的切线方向d1)上延伸的空间。af驱动单元14(驱动单元)夹持于突出部117a、117b之间,第一z方向基准滚珠15a和第二z方向基准滚珠15b配置于与突出部117a、117b的配置有af驱动单元14的一侧相反的一侧。
[0228]
另外,af支撑部15(第一支撑部)配置于两处,该两处位于在af驱动单元14(z方向驱动部)的延伸方向上,隔着af驱动单元14的两侧,施力部18(第一施力部)配置于一个af支撑部15侧。
[0229]
在实施方式和变形例1中,af可动部11具有从圆筒状的透镜容纳部111突出的突出部112a、112b,并且突出部112a、121b分别被第一z方向基准滚珠15a和第一预压滚珠15c、第二z方向基准滚珠15b和第二预压滚珠15d夹持。即,构成为将af可动部11以两点支撑于第一台部12的结构。
[0230]
在使af可动部11在光轴方向上移动的情况下,与从承受af驱动单元14的驱动力的力点(af共振部141与af动力传递部144的接触点)到旋转轴(第一z方向基准滚珠15a的中心)的距离相应地,在af可动部11产生力矩,因此,需要以能够抵消力矩的预压将af可动部11向第一台部12按压。
[0231]
在实施方式和变形例1中,构成为将af可动部11以两点支撑于第一台部12的结构,因此,能够将来自外部的力分散地承受,但是,通过减小从力点到旋转轴的距離来减小力矩从而减小预压,是有限度的。
[0232]
相对于此,在变形例2中构成为,在af可动部11中,由第一z方向基准滚珠15a和第二z方向基准滚珠15b将配置有af驱动单元14的部分夹入,并对第二z方向基准滚珠15b赋予预压的结构,即,将af可动部11以一点支撑于第一台部12的结构。
[0233]
由此,与实施方式和变形例1相比,可容易减小从承受af驱动单元14的驱动力的力
点到旋转轴的距离,能够减小力矩并减小预压。另外,第二z方向基准滚珠15b作为预压滚珠发挥功能,不需要实施方式中的第一预压滚珠15c和第二预压滚珠15d,从而能够减小滚动阻力。因此,af驱动单元14的驱动效率会提高,适合用作大口径透镜用的光学元件驱动装置。另外,如果预压相同,则抗倾斜性会提高。
[0234]
另外,在变形例2中,板簧181对第二z方向基准滚珠15b的施力方向d2与切线方向d1相交。具体而言,切线方向d1与施力方向d2所成的角度θ为0
°
~45
°
。af驱动单元14的延伸方向与切线方向d1相同,因此,也可以说,施力部18(第一施力部)配置为,俯视时的施力方向与af驱动单元14的延伸方向相交,且对af驱动单元14施力。
[0235]
由此,隔着第二z方向基准滚珠15b在正交的两个方向即x方向和y方向上按压af可动部11,因此,能够使光轴正交面内的姿势稳定。
[0236]
另外,在变形例2中,第一z方向基准滚珠15a和第二z方向基准滚珠15b分别由两个滚珠构成。
[0237]
由此,与实施方式和变形例1相比,能够减小第一z方向基准滚珠15a和第二z方向基准滚珠15b的滚动阻力,从而af驱动单元14的驱动效率会进一步提高。
[0238]
以上,基于实施方式对由本发明人完成的发明进行了具体说明,但本发明并不限于上述实施方式,能够在不脱离其要点的范围内进行变更。
[0239]
例如,在实施方式中,作为具备摄像机模块a的摄像机搭载装置的一例,举出作为带摄像机的便携终端的智能手机m进行了说明,但本发明能够应用于具有摄像机模块及对由摄像机模块得到的图像信息进行处理的图像处理部的摄像机搭载装置。摄像机搭载装置包括信息设备和运输设备。信息设备例如包括带摄像机的便携电话机、笔记本电脑、平板终端、便携式游戏机、web摄像机、带摄像机的车载装置(例如,后方监控装置、行车记录仪装置)。另外,运输设备例如包括汽车。
[0240]
图30a、图30b是表示作为搭载有车载用摄像机模块vc(vehicle camera,车用摄像机)的摄像机搭载装置的汽车v的图。图30a是汽车v的主视图,图30b是汽车v的后方立体图。汽车v搭载有实施方式中说明的摄像机模块a作为车载用摄像机模块vc。如图30a、图30b所示,车载用摄像机模块vc例如朝向前方安装于挡风玻璃,或者朝向后方安装于尾门。该车载用摄像机模块vc作为后方监控用、行车记录仪用、碰撞避免控制用、自动驾驶控制用等的车载用摄像机模块被使用。
[0241]
在实施方式中,在af可动部11和第一台部12都设置了第一z方向基准滚珠保持部112a、122a和第二z方向基准滚珠保持部112b、122b,但也可以在af可动部11和第一台部12中的一者设置第一z方向基准滚珠保持部和第二z方向基准滚珠保持部。
[0242]
另外,在实施方式中,第一z方向基准滚珠15a和第二z方向基准滚珠15b以af驱动单元14为基准在周向上对称地配置,但也可以非对称地配置。在该情况下,为了使af可动部11的移动动作稳定,优选地,构成为第一z方向基准滚珠15a位于af驱动单元14侧。
[0243]
另外,在实施方式中,af驱动单元14沿x方向配置,但af驱动单元14的配置形态不限于此,例如,也可以沿y方向配置,还可以相对于x方向和y方向倾斜地配置。
[0244]
另外,本发明不仅可以应用于自动聚焦,还可以应用于使可动部在光轴方向上移动的情况,例如变焦。
[0245]
并且,af单元的支撑结构不限于af驱动单元14那样由超声电机构成驱动源的情
况,还可以应用于具备超声电机以外的驱动源(例如,音圈电机(vcm))的光学元件驱动装置。
[0246]
另外,在实施方式中,对驱动作为光学元件的透镜部2的光学元件驱动装置1进行了说明,但作为驱动对象的光学元件也可以是是反射镜、棱镜等透镜以外的光学元件。
[0247]
应该认为此次公开的实施方式在所有方面均为例示,而非用于限制。本发明的范围并非由上述说明表示,而是由权利要求书表示,并且还包括与权利要求书等同的含义及权利要求书的范围内的所有变更。
[0248]
在2020年3月30日提交的美国临时申请63/002,305、在2020年7月15日提交的美国临时申请63/051,917及在2020年9月15日提交的美国临时申请63/078,357中包括的说明书、附图及说明书摘要的公开内容全部引用于本技术。
[0249]
附图标记说明
[0250]
1 光学元件驱动装置
[0251]
10 ois可动部(第二可动部)
[0252]
11 af可动部(第一可动部)
[0253]
12 第一台部(第一固定部)
[0254]
13 第二台部
[0255]
14 af驱动单元(z方向驱动部)
[0256]
141 af共振部(主动器件)
[0257]
142 af压电元件
[0258]
143 af电极
[0259]
144 af动力传递部(被动器件)
[0260]
15 af支撑部(第一支撑部)
[0261]
15a 第一z方向基准滚珠(第一基准滚珠)
[0262]
15b 第二z方向基准滚珠(第二基准滚珠)
[0263]
18 施力部(第一施力部)
[0264]
181 板簧(弹性部件)
[0265]
182 间隔件
[0266]
20 ois固定部(第二固定部)
[0267]
21 底座
[0268]
30 ois驱动单元(xy方向驱动部)
[0269]
31 ois共振部(主动器件)
[0270]
32 ois压电元件(主动器件)
[0271]
33 ois电极
[0272]
34 ois动力传递部(被动器件)
[0273]
40 ois支撑部(第二支撑部)
[0274]
50 ois用施力部件
[0275]
61 板(被动器件)
[0276]
62 施力部件
[0277]
112a、122a 第一z方向基准滚珠保持部(第一基准滚珠保持部)
[0278]
112b、122b 第二z方向基准滚珠保持部(第二基准滚珠保持部)
[0279]
a 摄像机模块
[0280]
m 智能手机(摄像机搭载装置)
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1