低相对相位噪声光梳产生装置的制作方法
本发明涉及一种能够在根据测定光的干涉信号与基准光的干涉信号的时间差来测定距离的光梳测距仪等中使用的产生2个以上的光梳的低相对相位噪声光梳产生装置。本技术基于在日本于2021年3月22日申请的日本专利申请号特愿2021-026718而主张优先权,将该申请以参照的形式引入本技术中。
背景技术:
1、以往,作为能够进行点的精密的距离测量的主动式距离测量方法,已知利用激光的基于光学原理的距离测量。在使用激光来测定到对象物体的距离的激光测距仪中,基于激光的发射时刻与由受光元件检测出照射至测定对象后被反射回来的激光的时刻之差,来计算到测定对象物的距离。另外,例如,对半导体激光器的驱动电流施加三角波等的调制,使用嵌入于半导体激光器元件中的光电二极管接收由对象物反射的反射光,根据光电二极管输出电流中出现的锯齿状波的主波数来得到距离信息。
2、作为高精度地测定从某个点到测定点的绝对距离的装置,已知激光测距仪。
3、在以往的绝对测距仪中,难以实现高精度地测量长的距离的实用的绝对测距仪,并且,为了得到高分辨率,只有如激光位移计那样需要返回原点的方法,但该方法不适合于绝对距离测定。
4、本案发明人等以前提出了一种测距仪、距离测定方法以及光学三维形状测定机(例如参照专利文献1),具备脉冲式地射出分别被周期性地调制强度或相位且调制周期互不相同的具有干涉性的基准光和测定光的2个光梳产生器,通过基准光检测器来检测向基准面照射的基准光脉冲与向测定面照射的测定光脉冲的干涉光,并且通过测定光检测器来检测由上述基准面反射后的基准光脉冲与由上述测定面反射后的测定光脉冲的干涉光,根据通过上述基准光检测器和测定光检测器得到的2个干涉信号的时间差,求出到上述基准面的距离与到上述测定面的距离之差,由此能够高精度地且在短时间内进行测量。
5、另外,以前提出了一种能够进行反射光水平从低反射材料连续地至高反射材料的、反射光水平的动态范围广的测量的测距仪、距离测定方法以及光学三维形状测定机(例如参照专利文献2)。
6、在光梳测距仪中,从原理上说,使用从利用频率不同的2种调制信号来驱动的2个光梳产生器脉冲式地射出的具有干涉性的基准光脉冲和测定光脉冲,由此在信号处理部中针对由基准光检测器得到的干涉信号(下面称为参照信号。)以及由测定光检测器得到的干涉信号(下面称为测定信号。)进行频率分析,将从光梳的中心频率开始数起的模式编号设为n,计算参照信号与测定信号的n次模式之间的相位差来抵消从光梳产生器到基准点的光梳生成、传输过程的光相位差,之后,计算频率轴上每一次的相位差的增量来求出测定信号脉冲与参照信号脉冲的相位差,由此计算从基准点到测定面的距离。
7、如专利文献1所记载的那样,为了确保作为光梳测距仪中的2台光梳产生器的驱动信号源的频率fm和频率fm+δf的信号的相对稳定性,重要的是使脉冲的重复频率相对固定。
8、并且,在光梳测距仪中,如果除了因频率fm与频率fm+δf的频率差而引起的周期性的相位旋转、因测定光脉冲在测定区间往复而引起的相位的延迟以外,还存在附加的相位波动或相位噪声,则会成为测量结果的偏差的原因。关于干涉信号,参照信号和测定信号均以1/δf为周期产生。通过以参照信号的产生时刻为基准计算测定信号的延迟时间或相位的处理,能够一定程度地消除与δf相比非常低的频率的(比1/δf长的周期的)相位波动、相位噪声。但是,对于以比δf的倒数的周期短的期间变化的相位波动,没有校正方法,而是直接作为测量结果的偏差出现。为了减小作为测量时间的最短时间的δf分之一周期的测量值的偏差,要求短期性的fm与fm+δf的相对相位的稳定性。
9、用于驱动2个光梳产生器的调制信号例如能够通过被设为能够通过pll(phase-locked loop:锁相环)设定频率的调制信号产生器来获得。
10、但是,即使使用相同的基准振荡器,在例如通过pll来将低频的基准信号的频率提高至微波频带的驱动频率时,也有可能累积相位的抖动,因此从短期来说有可能在相对相位中包含抖动。在该情况下,短时间地测量的情况下的测定精度降低。因而,为了缩短测量时间,需要一对使锁相环的频带取得很宽的振荡器。
11、另外,在光梳测距仪中,在信号处理部中也可以使用峰检测电路来求出信号的峰的时间差,或者对信号进行高速傅里叶变换来求出频率与相位的关系,由于信号的重复快,因此能够在短时间内进行距离测定。
12、在专利文献2的公开技术中,通过低增益的第二干涉信号或高增益的第二干涉信号的值的希尔伯特变换来求出原始的波形的正交相位分量,根据通过原始的波形与希尔伯特变换波形的平方和得到的包络线的平方波形的峰值来求出。
13、这意味着在专利文献1、专利文献2的形状测量器、测距仪中求出干涉波形的包络线峰很重要。如专利文献1的图2所示那样,包络线峰由基准脉冲序列与测定光脉冲序列之间的重叠决定。基准脉冲序列和测定光脉冲序列各自的抖动由fm和fm+δf的信号的相位噪声决定,因此fm和fm+δf的光梳的干涉信号的包络线峰的抖动由fm和fm+δf的光梳的驱动信号的相对相位噪声决定。
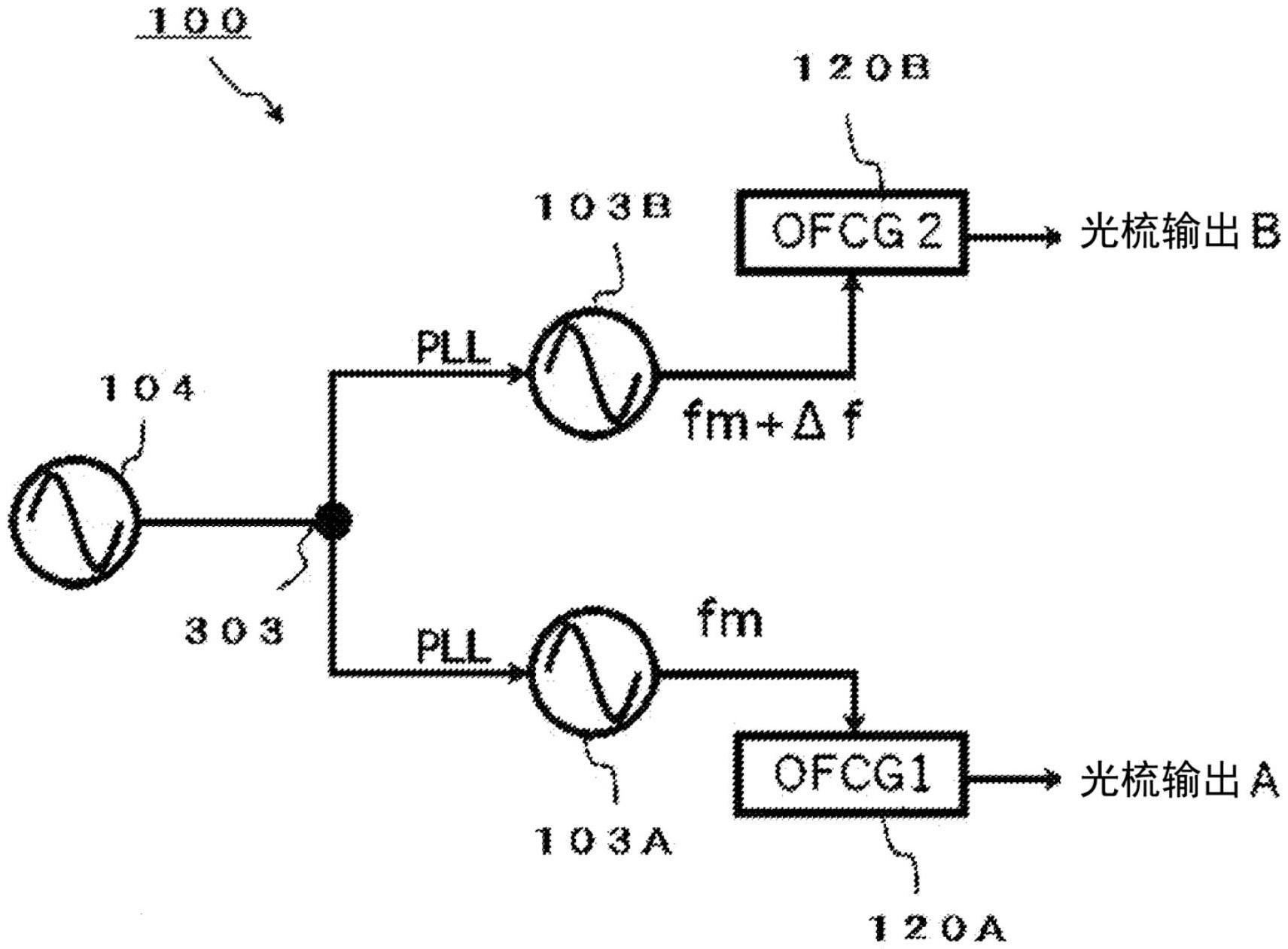
14、在此,在图1中示出以往的光梳驱动电路的例子。其是从专利文献1的图6所示的光源100中摘取出此处要说明的部分而得到的。
15、振荡器103a、103b与共同的基准振荡器104之间进行了相位同步。通常来说,在基准振荡器104中使用10mhz的ocxo、或者与铷原子振荡器、铯原子振荡器进行了同步的10mhz的ocxo。根据测定距离、所需精度,来按需要选择基准频率的绝对频率的准确度。关于光梳产生器120a、120b,可以考虑是在生成具有周期性的驱动信号的振荡器103a、103b的信号过零时产生光脉冲序列的装置,各个脉冲的抖动由振荡器103a、103b的相位噪声决定。
16、在此,图2引用专利文献1的图8的波形例,将各个包络线的峰时间表示为t0、t1、t2、t3、···、tn。2个光梳产生器120a、120b由于驱动信号的频率分别为fm+δf和fm,因此干涉波形的包络线峰与驱动信号的差频δf同步,包络线峰间隔为tb=1/δf。
17、关于干涉波形的包络线峰的时间,如专利文献1的第[0045]段起所提及的那样,在光梳产生器120a、120b输出的光脉冲一致的定时成为峰,因此存在取决于对光梳产生器120a、120b进行驱动的2个振荡器103a、103b的相对相位噪声的抖动。
18、使用光梳干涉的测距仪以及光学三维形状测定机以参照信号的包络线峰为基准,根据到达测定信号的包络线峰为止的时间来求出到对象物体的距离。其测量精度由通过包络线峰值的抖动(与周期性相偏离的偏离量tn-ntb的抖动)的rms值来代表的、2个振荡器103a、103b的相对相位噪声决定。当将2个振荡器103a、103b的相位噪声分别设为φa(t)、φb(t)时,包络线峰值的抖动(与周期性相偏离的偏离量tn-ntb的抖动)的rms值通过下面的式(1)来表示。
19、
20、在此,<>为时间平均。
21、在此,即使将基准振荡器104假定为无噪声的理想振荡器,由于相位同步的相位比较器的噪声限值和相位同步的控制频带存在极限,因此也存在不相关的相位噪声,当将2个振荡器103a、103b的相位噪声分别设为φa(t)和φb(t)时,由于φa(t)与φb(t)彼此不相关,因此tn-ntb的抖动的rms值成为下面的式(2)。
22、
23、在此,作为典型的振荡器的相位噪声的例子,关于ultra herley公司制造的ultraherley series pcro、ultra herley series pdro、ultra herley series pxs,在图3中示出引用非专利文献1的数据来绘制出的各振荡器的相位噪声特性。在设计高性能的系统时会选择相位噪声非常小的振荡器,该产品是相位噪声非常小的振荡器。
24、当设为fm=25ghz时,振荡器103a、103b的相位噪声与图3所示的26ghz振荡器(ultra herley series pcro)的相位噪声相当。该相位噪声至少到100khz为止都为-110dbc/hz以上。当设为各不相关时,能够认为fm和fm+δfm的相对相位噪声是作为pcro的特性示出的约+3db左右。
25、相位差的相位噪声的rms值即使如下面的式(3)所示那样仅考虑100khz为止的相位噪声的累计来进行计算,也为-57dbc。
26、-110dbc/hz+3db+10lpg10(100khz)=-57dbc (3)
27、关于上述相位差的相位噪声的rms值-57dbc,作为tb=10μs的情况下的干涉波形的抖动,以rms值而言相当于14ns,当换算为fm=25ghz的情况下的距离测定时,相当于6μm。
28、因而,在光梳测距仪中,为了减小测定的偏差,本质上需要减小式(1)所示的φa(t)-φb(t)。
29、在专利文献1、专利文献2的公开技术中,通过采用使用具有基准面的干涉仪和基准光检测器来测定包络线峰的系统与使用包含被测定距离的干涉仪和测定光检测器的干涉波形的包络线峰之差,来减少相位噪声的影响。
30、现有技术文献
31、专利文献
32、专利文献1:日本专利第5231883号公报
33、专利文献2:日本特开2020-008357号公报
34、非专利文献
35、非专利文献1:ultra herley主页https://www.ultra-herley.com/uploads/herley/datasheets/cti/ultra%20herley%20series%20pdro.pdfhttps://www.ultra-herley.com/uploads/herley/datasheets/cti/ultra%20herley%20series%20pcro.pdfhttps://www.ultra-herley.com/uploads/herley/datasheets/cti/ultra%20herley%20series%20pxs.pdf
36、非专利文献2:analog devices主页https://www.analog.com/media/jp/analog-dialogue/volume-51/number-3/articles/improved-dac-phase-noise-measurements-enable-ultra-low-phase-noise-dds-applications_jp.pdf
技术实现思路
1、发明要解决的问题
2、在专利文献1所公开的光梳测距仪中,2个振荡器103a、103b的频率为fm=25ghz这样的高频。在对这种高频的振荡器使用低频(例如10mhz)的基准信号的相位同步中,相位比较器的分频度大,从而相位比较器的噪声大。另外,即使对相位比较器的噪声水平也进行了控制,由于相位比较器之间的噪声不相关,因此2台振荡器的相位噪声也不相关。另外,控制为宽频带会反过来成为使振荡器的相位噪声增大的原因,因此控制频带存在最优值。
3、然而,在专利文献1中,虽然强烈认识到多个光梳的驱动信号源的相对稳定性很重要,但是仅记载了需要一对使锁相环的频带取得很宽的振荡器,并没有示出实现多个光梳的驱动信号源的相对稳定性的方案。
4、因此,鉴于如上所述的以往的实际情况,本发明的目的在于提供一种通过降低用于驱动光梳测距仪中的多个光梳产生器的不同频率的驱动信号的相对相位噪声来使得光梳的干涉信号的重复频率稳定的低相对相位噪声光梳产生装置。
5、另外,本发明的其它目的在于能够降低测距仪、形状测量机等的测定偏差,并能够使测定高速化。
6、本发明的其它目的、通过本发明得到的具体的优点将根据下面说明的实施方式的说明而变得更加明确。
7、用于解决问题的方案
8、在本发明中,通过降低用于驱动光梳测距仪中的多个光梳产生器的不同频率的驱动信号的相对相位噪声,来使光梳的干涉信号的重复频率稳定。
9、即,本发明是一种低相对相位噪声光梳产生装置,其特征在于,具备:至少3个振荡器,所述至少3个振荡器产生频率互不相同的频率信号;至少2个频率变换器,所述至少2个频率变换器被输入由所述3个振荡器中的1个振荡器得到的频率信号、以及由除所述1个振荡器以外的各振荡器得到的各频率信号;以及至少2个光梳产生器,所述至少2个光梳产生器被供给由所述至少2个频率变换器进行频率变换而得到的频率互不相同的至少2种调制信号,其中,所述至少2个频率变换器分别将作为由所述1个振荡器得到的频率信号与由其它振荡器得到的频率信号的和频信号或差频信号的、降低了相对相位噪声的所述至少2种调制信号作为驱动信号供给到至少2个光梳产生器。
10、在本发明所涉及的低相对相位噪声光梳产生装置中,能够设为,所述至少3个振荡器中的除所述1个振荡器以外的各振荡器的相位噪声比所述1个振荡器的相位噪声小。
11、在本发明所涉及的低相对相位噪声光梳产生装置中,能够设为,所述至少3个振荡器产生相位与由基准振荡器提供的基准频率信号的相位同步且频率互不相同的频率信号。
12、在本发明所涉及的低相对相位噪声光梳产生装置中,能够设为,所述至少2个频率变换器分别是混频器。
13、另外,在本发明所涉及的低相对相位噪声光梳产生装置中,能够设为,所述至少2个频率变换器分别由混频器、相位比较器以及电压控制型振荡器构成。
14、另外,在本发明所涉及的低相对相位噪声光梳产生装置中,能够设为,调制信号从所述至少2个频率变换器分别经由带通滤波器而作为驱动信号被供给到所述至少2个光梳产生器。
15、另外,在本发明所涉及的低相对相位噪声光梳产生装置中,能够设为,由所述1个振荡器得到的频率信号分别经由隔离器而被输入到所述至少2个频率变换器。
16、另外,在本发明所涉及的低相对相位噪声光梳产生装置中,能够设为,所述至少3个振荡器产生分别通过pll电路而相位与基准的频率信号的相位同步且频率被固定的状态的至少3种调制信号。
17、另外,在本发明所涉及的低相对相位噪声光梳产生装置中,能够设为,所述至少3个振荡器中的除所述1个振荡器以外的各振荡器是通过相位与所述基准频率信号的相位同步的时钟来驱动的各数字直接合成振荡器(dds:direct digital synthesizer)。
18、另外,本发明所涉及的低相对相位噪声光梳产生装置能够设为,具备3个振荡器、2个频率变换器以及2个光梳产生器,所述3个振荡器产生相位与所述基准频率信号的相位同步且频率互不相同的频率信号,将通过所述2个频率变换器得到的降低了相对相位噪声的2种调制信号作为驱动信号供给到所述2个光梳产生器。
19、并且,本发明所涉及的低相对相位噪声光梳产生装置能够设为,当将x设为1以上的整数,将y设为2以上的整数时,具备(x+y)个振荡器、xy个频率变换器以及y个光梳产生器,所述(x+y)个振荡器产生相位与所述基准频率信号的相位同步且频率互不相同的频率信号,所述低相对相位噪声光梳产生装置是使由(y+1)个振荡器、y个频率变换器以及y个光梳产生器构成的基本结构x重化而形成的。
20、发明的效果
21、在本发明中,能够提供如下的低相对相位噪声光梳产生装置:将作为由1个振荡器得到的频率信号与由相位噪声比该频率信号的相位噪声小的其它振荡器得到的频率信号的和频信号或差频信号的、降低了相对相位噪声的调制信号作为驱动信号供给到2个光梳产生器,由此使得光梳的干涉信号的重复频率稳定。
22、在本发明中,能够降低用于驱动多个光梳产生器的不同频率的驱动信号的相对相位噪声来使光梳的干涉信号的重复频率稳定,能够降低测距仪、形状测量机等的测定偏差并使测定高速化。
- 还没有人留言评论。精彩留言会获得点赞!