成像方法、系统、装置、计算机设备和存储介质与流程
本技术涉及显微成像,特别是涉及一种成像方法、系统、装置、计算机设备和存储介质。
背景技术:
1、随着光学显微成像技术的不断发展,出现了共聚焦显微镜成像技术。由于共聚焦显微镜成像技术的高稳定性,且对不同的多种样品的高适应性,因此,共聚焦显微镜成像技术在生命科学显微成像领域占有重要地位。
2、现有的共聚焦成像技术的成像质量严重依赖于共聚焦小孔的大小及位置:小孔大,则去除背景提升信噪比的功能降低,而对分辨率没有任何提升;小孔小,则可通过的荧光信号低,信噪比也会相应降低;小孔位置如果有偏差,则会使得探测到的荧光信号极大下降。因此,在相关技术中,一般通过多种算法(如,去卷积维纳滤波算法、最大熵算法、gerchberg-saxton算法)对共聚焦图像进行处理,但是上述算法计算得到的共聚焦图像的质量与原始图像的成像质量关系较大,受原始图像的噪声影响较大,导致共聚焦图像质量较差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高成像质量的成像方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种成像方法。所述方法应用于包括微镜芯片的成像系统,所述微镜芯片上包括多个微镜;所述方法包括:
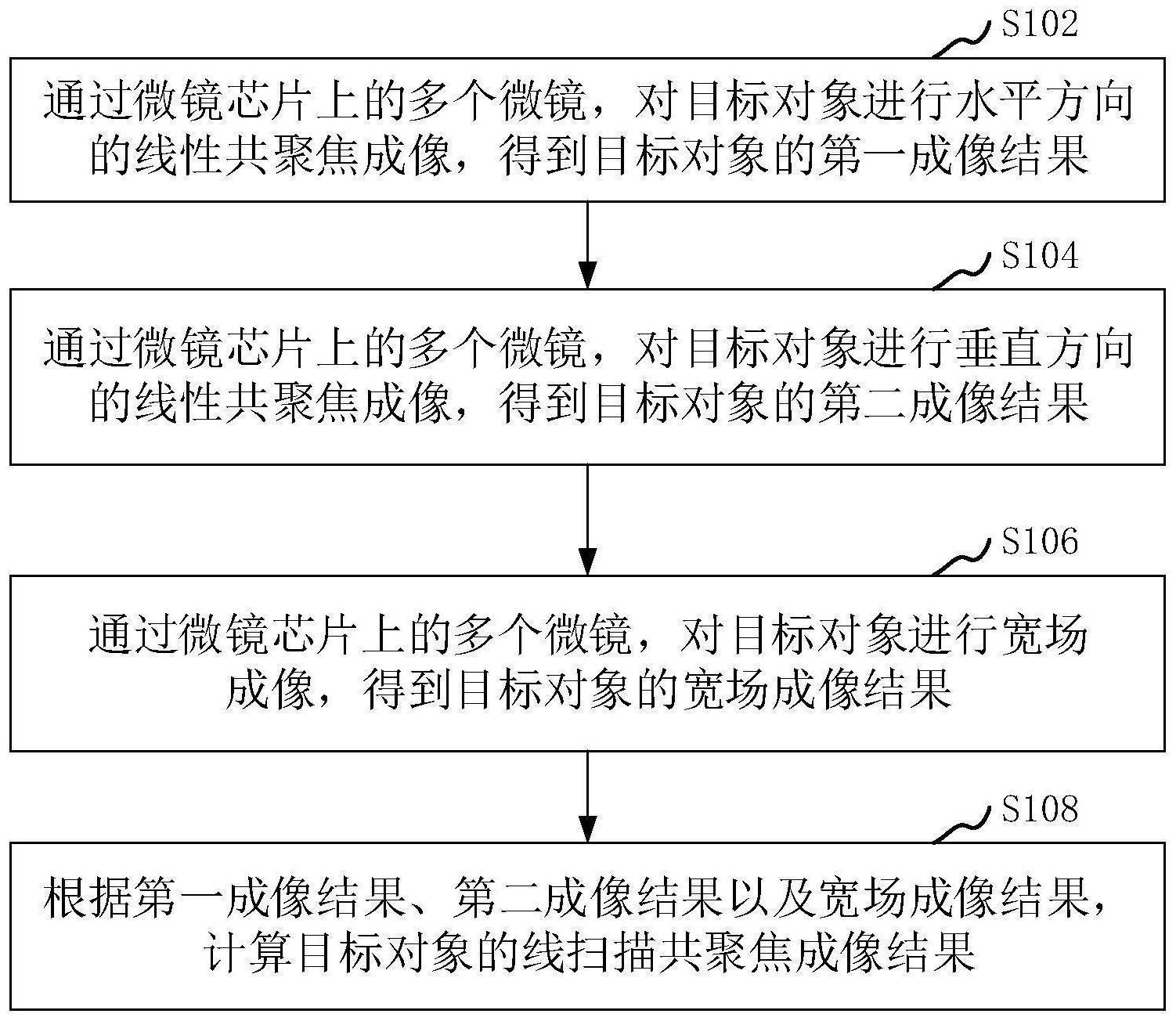
3、通过所述微镜芯片上的多个微镜,对目标对象进行水平方向的线性共聚焦成像,得到所述目标对象的第一成像结果;
4、通过所述微镜芯片上的多个微镜,对所述目标对象进行垂直方向的线性共聚焦成像,得到所述目标对象的第二成像结果;
5、通过所述微镜芯片上的多个微镜,对所述目标对象进行宽场成像,得到所述目标对象的宽场成像结果;
6、根据所述第一成像结果、所述第二成像结果以及所述宽场成像结果,计算所述目标对象的线扫描共聚焦成像结果。
7、在其中一个实施例中,所述通过所述微镜芯片上的多个微镜,对目标对象进行水平方向的线性共聚焦成像,得到所述目标对象的第一成像结果,包括:
8、按照预设水平次序,沿所述微镜芯片上所述微镜的水平方向依次确定多个目标行;
9、针对所述微镜芯片上的每一所述目标行,启动所述目标行的微镜,并关闭所述目标行的前一行的微镜,以使所述目标行的微镜照射所述目标对象,对所述目标对象进行线性共聚焦成像,得到所述目标行的成像结果;
10、根据所述多个目标行的成像结果,得到所述目标对象的第一成像结果。
11、在其中一个实施例中,所述通过所述微镜芯片上的多个微镜,对所述目标对象进行垂直方向的线性共聚焦成像,得到所述目标对象的第二成像结果,包括:
12、按照预设垂直次序,沿所述微镜芯片上所述微镜的垂直方向依次确定多个目标列;
13、针对所述微镜芯片上的每一所述目标列,启动所述目标列的微镜,并关闭所述目标列的前一列的微镜,以使所述目标列的微镜照射所述目标对象,对所述目标对象进行线性共聚焦成像,得到所述目标列的成像结果;
14、根据所述多个目标列的成像结果,得到所述目标对象的第二成像结果。
15、在其中一个实施例中,所述根据所述第一成像结果、所述第二成像结果以及所述宽场成像结果,计算所述目标对象的线扫描共聚焦成像结果,包括:
16、对所述第一成像结果以及所述第二成像结果进行求和处理,得到目标值;
17、将所述目标值与所述宽场成像结果的差,作为所述目标对象的线扫描共聚焦成像结果。
18、在其中一个实施例中,所述方法还包括:
19、根据所述第一成像结果,对所述第二成像结果进行对齐处理,得到所述第二成像结果对应的第三成像结果;
20、对所述第一成像结果以及所述第三成像结果进行融合处理,得到初步融合结果;
21、根据所述初步融合结果进行联合反卷积计算,得到所述目标对象的线扫描共聚焦成像结果。
22、第二方面,本技术还提供了一种成像系统,所述系统包括:微镜芯片、激光光源模块、成像模块以及数据处理模块;其中,所述微镜芯片包括多个微镜,
23、所述激光光源模块,用于发射激光光源;
24、所述微镜,用于将所述激光光源照射至目标对象,以使所述成像模块对所述目标对象进行水平方向的线性共聚焦成像,得到所述目标对象的第一成像结果;对所述目标对象进行垂直方向的线性共聚焦成像,得到所述目标对象的第二成像结果;对所述目标对象进行宽场成像,得到所述目标对象的宽场成像结果;
25、所述数据处理模块,用于根据所述第一成像结果、所述第二成像结果以及所述宽场成像结果,计算所述目标对象的线扫描共聚焦成像结果。
26、在一个实施例中,所述系统还包括成像控制模块;
27、所述成像控制模块,用于按照预设水平次序,沿所述微镜芯片上所述微镜的水平方向依次确定多个目标行;针对所述微镜芯片上的每一所述目标行,启动所述目标行的微镜,并关闭所述目标行的前一行的微镜,以使所述目标行的微镜照射所述目标对象,对所述目标对象进行线性共聚焦成像,得到所述目标行的成像结果;根据所述多个目标行的成像结果,得到所述目标对象的第一成像结果。
28、所述成像控制模块,还用于按照预设垂直次序,沿所述微镜芯片上所述微镜的垂直方向依次确定多个目标列;针对所述微镜芯片上的每一所述目标列,启动所述目标列的微镜,并关闭所述目标列的前一列的微镜,以使所述目标列的微镜照射所述目标对象,对所述目标对象进行线性共聚焦成像,得到所述目标列的成像结果;根据所述多个目标列的成像结果,得到所述目标对象的第二成像结果。
29、第三方面,本技术还提供了一种成像装置,所述装置包括:
30、第一成像单元,用于通过微镜芯片上的多个微镜,对目标对象进行水平方向的线性共聚焦成像,得到所述目标对象的第一成像结果;
31、第二成像单元,用于通过所述微镜芯片上的多个微镜,对所述目标对象进行垂直方向的线性共聚焦成像,得到所述目标对象的第二成像结果;
32、宽场成像单元,用于通过所述微镜芯片上的多个微镜,对所述目标对象进行宽场成像,得到所述目标对象的宽场成像结果;
33、计算单元,用于根据所述第一成像结果、所述第二成像结果以及所述宽场成像结果,计算所述目标对象的线扫描共聚焦成像结果。
34、第四方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
35、通过所述微镜芯片上的多个微镜,对目标对象进行水平方向的线性共聚焦成像,得到所述目标对象的第一成像结果;
36、通过所述微镜芯片上的多个微镜,对所述目标对象进行垂直方向的线性共聚焦成像,得到所述目标对象的第二成像结果;
37、通过所述微镜芯片上的多个微镜,对所述目标对象进行宽场成像,得到所述目标对象的宽场成像结果;
38、根据所述第一成像结果、所述第二成像结果以及所述宽场成像结果,计算所述目标对象的线扫描共聚焦成像结果。
39、第五方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
40、通过所述微镜芯片上的多个微镜,对目标对象进行水平方向的线性共聚焦成像,得到所述目标对象的第一成像结果;
41、通过所述微镜芯片上的多个微镜,对所述目标对象进行垂直方向的线性共聚焦成像,得到所述目标对象的第二成像结果;
42、通过所述微镜芯片上的多个微镜,对所述目标对象进行宽场成像,得到所述目标对象的宽场成像结果;
43、根据所述第一成像结果、所述第二成像结果以及所述宽场成像结果,计算所述目标对象的线扫描共聚焦成像结果。
44、第六方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
45、通过所述微镜芯片上的多个微镜,对目标对象进行水平方向的线性共聚焦成像,得到所述目标对象的第一成像结果;
46、通过所述微镜芯片上的多个微镜,对所述目标对象进行垂直方向的线性共聚焦成像,得到所述目标对象的第二成像结果;
47、通过所述微镜芯片上的多个微镜,对所述目标对象进行宽场成像,得到所述目标对象的宽场成像结果;
48、根据所述第一成像结果、所述第二成像结果以及所述宽场成像结果,计算所述目标对象的线扫描共聚焦成像结果。
49、上述成像方法、装置、计算机设备、存储介质和计算机程序产品,通过所述微镜芯片上的多个微镜,对目标对象进行水平方向的线性共聚焦成像、垂直方向的线性共聚焦成像以及宽场成像,得到所述目标对象的第一成像结果、第二成像结果以及宽场成像结果;根据上述成像结果,计算所述目标对象的线扫描共聚焦成像结果。采用本发明实施例提供的成像方法,可以在水平方向以及垂直方向上分别进行共聚焦线扫描激光照射成像,对同一个视野里的信号进行不同方向的多次采样,并根据采样结果计算最终成像结果,可以提高图像信号采集的准确性,减少信息丢失,提高信噪比,提升成像速度以及空间分辨率,并改善最终成像结果的成像质量。
- 还没有人留言评论。精彩留言会获得点赞!