基于全自动位移台的显微成像自动化检测方法及系统
1.本发明属于自动化光学显微计算成像技术,特别是一种基于全自动位移台的显微成像自动化检测方法及系统。
背景技术:
2.在显微成像领域中,人们致力于高效清晰地获取图像以提高成像精度,因此更高的分辨率与更大的成像视场一直是人们追求的目标。传统的显微成像受到其物镜数值孔径(na)的限制,存在空间带宽积(sbp)无法随分辨率一起提高的问题,所以空间分辨率的提高与视场的扩大必然成为了一对难以调和的矛盾。
3.fpm虽然实现了分低倍镜分辨率的提高,但即使是较低倍镜,仍然存在无法对样本全视野成像的问题,而在诸如病理组织切片领域中,突破性的大视野或全视野,在实际应用中可以彻底改变观察方式与效率,会极大的减少对图像的辨别诊断时间,同时确保其核心成像系统在相机不断快速发展的情况下适应未来需求,提高数据采集量,方便使用,高效快捷。所以大视野,全视野一直是人们的追求目标也是未来的必然趋势。
技术实现要素:
4.本发明所要解决的技术问题在于提供一种基于全自动位移台的显微成像自动化检测方法及装置,针对显微成像领域对于大视野、高分辨率的追求,利用傅里叶叠层显微成像实现低倍物镜的高分辨率成像,结合机械扫描成像方法实现大视场成像。同时利用自动传送和拾取,极大提高生产效率并减少对待测样品的损害。
5.本发明是这样实现的,
6.一种基于全自动位移台的显微成像自动化检测方法,包括:
7.将盛放待测样本的载物板传动至自动化拾取机拾取待测样本;
8.将拾取的样本送入至显微成像装置进行成像处理;
9.其中,所述显微成像装置包括:包括光学平板、双轴电动载物台、单轴对焦台、双轴手动位移台、led矩阵、显微物镜、成像镜筒以及相机,所述的光学平板上固定双轴电动载物台、单轴对焦台、以及双轴手动位移台,保证双轴电动载物台、单轴对焦台、以及双轴手动位移台的相互对齐,便于扫描成像的配准及拼接;所述双轴电动载物台用于放置待显微成像的待测样本,可携带样本进行水平的x、y方向平移;所述单轴对焦台用于调整成像焦面及显微物镜与待测样本之间的距离,基于对焦算法实现采集成像过程中的微调,从而自动对焦;所述双轴手动位移台一面固定在光学平板上,另一面与led矩阵固定,用于手动调整led矩阵的方位,令led矩阵中心位于成像光轴上,便于傅里叶叠层显微成像的参数计算;所述单轴对焦台上设置显微物镜、成像镜筒以及相机;所述运动控制机与电机驱动器相连,对运动控制器发送运动指令,运动控制器将立即发送响应指令给电机驱动器,电机驱动器随后将运动指令翻译为运动脉冲,控制相对应的双轴电动载物台及单轴对焦台进行步进运动;还包括有led控制板与led矩阵相连,使用usb串口与计算机连接,通过串口根据规定的亮灯协
议发送led灯点亮指令,led控制板接受并处理亮灯指令后,将根据指令要求点亮led矩阵对应的led点;
10.所述显微成像装置进行成像处理包括:机械扫描成像模式和傅里叶叠层显微模式,其中,机械扫描成像模式用于大视野快速成像,傅里叶叠层显微模式用于高分辨率成像。
11.进一步地,当需要对样本进行大视野快速成像时,选用机械扫描成像模式,步骤如下:
12.步骤11,双轴电动载物台与相机方向标定,与双轴电动载物台方向平齐放置标定网格板,打开相机采集程序,利用单轴对焦台控制对焦后,采集一张标定网格板的清晰图片,并选取好采集图像的特征比对点pa,记录pa在图像上的坐标xa,ya,控制双轴电动载物台向x轴方向运动,使得选取的特征对比点pa与原图像的坐标较远,但依旧在图像的视野上,记录下移动x轴后pa的坐标x
′a,y
′a,连接上述两个坐标点并计算坐标点连线相对于x轴的偏移角度θ,旋转相机对应的θ角,使得相机成像平面的x轴与位移台x轴对齐;再次采集图像选取特征对比点,控制双轴电动载物台向x轴方向运动,纠正对应相机角度直到前后的标定点连线相对x轴的夹角为0;
13.步骤12,导入双轴电动载物台的扫描点列表,打开系统操作界面,开启相机实时监控以及双轴电动载物台手动控制插件,记录特征点pb,控制双轴电动载物台向x轴缓慢移动,使得特征点pb与图像边缘保持20%的覆盖面积,记录能实现上述保证的最大位移距离,作为每个扫描点之间的位移长度,记为d
x
,dy;控制双轴电动载物台从左上到右下以d
x
,dy逐个移动,同时标记好各扫描点的坐标,作为扫描点列表;
14.步骤13,在操作界面勾选扫描模式,导入在步骤12获得的扫描点列表。开始采集,首先led矩阵被全部点亮,双轴电动载物台逐个移动到扫描点列表中的各点坐标上,定位后,相机将被触发,采集对应扫描点的图像。
15.步骤14,扫描并采集完毕各点图像后,利用图像拼接及图像融合算法,将采集获得的多张图像拼接成一张大图,获得大视野的待测样本图像。
16.进一步地,当需要对样本进行高分辨率成像时,可选用傅里叶叠层显微模式,包括步骤如下:
17.步骤21,led矩阵位置标定,将显微物镜取下,换成磨砂玻璃对准片,在无待测样本的情况下单独点亮led矩阵的中心点,打开相机的监视页面,观察led中心点是否在视野中心,如不在,则微调双轴手动位移台将led中心点置于相机视野中心完成位置标定;
18.步骤22,初始对焦,将磨砂玻璃对准片取下,换成显微物镜,放置待测样本在显微物镜正下方,点亮led中心点,并使用相机观察待测样本的成像情况,控制单轴对焦台调整显微物镜到待测样本的焦面,使得相机成像清晰,轮廓明朗;
19.步骤23,采集原始图像,在操作界面勾选傅里叶叠层显微成像模式,将led矩阵作为光源,依次点亮led矩阵中每一个led点或者以led中心点为中心的对称图样点,采集对应的低分辨率原始图像;
20.步骤24,原始图像去噪,在原始图像选定两个噪声roi:r1,r2,计算各原始图像rawi对应roi的图像强度均值n
i1
,n
i2
,再取n
i1
,n
i2
的均值n
i-aveg
作为原始图像rawi对应的背景噪声均值,若n
i-aveg
大于设定阈值,则认为该区域为实际信号而不是噪声,此时取n
i-1-aveg
作为
rawi的近似背景噪声强度;
21.步骤25,高分辨率图像初始化,中心明场图通过上采样来初始化高分辨率图像的振幅与相位。
22.步骤26,迭代重建高分辨率图,采用基于频域叠层孔径与像素合并迭代方法将低分辨率图像在频域中逐一进行合成孔径运算,以代价函数值为判据,当代价函数小于一个给定的阈值时,停止迭代,此时的高分辨率图像的振幅与相位就是最终得到的大视场高分辨率显微图像。
23.进一步地,当需要对样本进行大视野、高分辨率成像时包括步骤如下:
24.步骤31,双轴电动载物台与相机方向标定,与双轴电动载物台方向平齐放置标定网格板。打开相机采集程序,利用单轴对焦台控制对焦后,采集一张标定网格板的清晰图片,并选取好采集图像的特征比对点pa,记录pa在图像上的坐标xa,ya,控制双轴电动载物台向x轴方向运动,使得选取的特征对比点pa与原图像的坐标较远,但依旧在图像的视野上,记录下移动x轴后pa的坐标x
′a,y
′a。连接上述两个坐标点并计算坐标点连线相对于x轴的偏移角度θ,旋转相机对应的θ角,使得相机成像平面的x轴与位移台x轴对齐,再次采集图像选取特征对比点,控制双轴电动载物台向x轴方向运动,纠正对应相机角度直到前后的标定点连线相对x轴的夹角为0;
25.步骤32,led矩阵位置标定,将显微物镜取下,换成磨砂玻璃对准片,在无待测样本的情况下单独点亮led矩阵的中心点,打开相机的监视页面,观察led中心点是否在视野中心,如不在,则微调双轴手动位移台将led中心点置于相机视野中心完成位置标定;
26.步骤33,初始对焦,将磨砂玻璃对准片取下,换成显微物镜,放置待测样本在显微物镜正下方,点亮led中心点,并使用相机观察待测样本的成像情况,控制单轴对焦台调整显微物镜到待测样本的焦面,使得相机成像清晰,轮廓明朗;
27.步骤34,导入双轴电动载物台的扫描点列表。打开系统操作界面,开启相机实时监控以及双轴电动载物台手动控制插件,记录特征点pb,控制双轴电动载物台向x轴缓慢移动,使得特征点pb与图像边缘保持20%的覆盖面积,记录能实现上述保证的最大位移距离,作为每个扫描点之间的位移长度,记为d
x
,dy。控制双轴电动载物台从左上到右下以d
x
,dy逐个移动,同时标记好各扫描点的坐标,作为扫描点列表;
28.步骤35,在操作界面勾选扫描模式及傅里叶叠层显微成像模式,导入在步骤32获得的扫描点列表;在双轴电动载物台移动到对应扫描点坐标时,将led矩阵作为光源,依次点亮led矩阵中每一个led点或者以led中心点为中心的对称图样点,采集该扫描点下对应的低分辨率原始图像,扫描并采集完毕各点图像后,利用图像拼接将同一led点光源下采集的对应扫描图像拼接成傅里叶叠层原始图;
29.步骤36,原始图像去噪,在原始图像选定两个合适的噪声roi:r1,r2,计算各原始图像rawi对应roi的图像强度均值n
i1
,n
i2
,再取n
i1
,n
i2
的均值n
i-aveg
作为原始图像rawi对应的背景噪声均值,若n
i-aveg
大于某个阈值,则认为该区域为实际信号而不是噪声,此时取n
i-1-aveg
作为rawi的近似背景噪声强度;
30.步骤37,高分辨率图像初始化,中心明场图通过上采样来初始化高分辨率图像的振幅与相位;
31.步骤38,迭代重建高分辨率图,采用基于频域叠层孔径与像素合并迭代方法将低
分辨率图像在频域中逐一进行合成孔径运算,以代价函数值为判据,当代价函数小于一个给定的阈值时,停止迭代,此时的高分辨率图像的振幅与相位就是最终得到的大视场高分辨率显微图像。
32.进一步地,通过传动装置将盛放待测样本的载物板传动,所述传动装置包括运输线,所述运输线包括所述底板以及设置在两侧的侧板,两侧的侧板上设置传送带,所述的传送带张紧的放置在主动轮、从动轮和传送带垫板上,所述的传送带垫板两侧有突起,便于限制传送带的位置;通过阻尼电机携带主动同步轮转动后通过张紧同步带驱动d字轴上的从动同步轮,从而使两侧的主动轮转动;所述载物板放置在传送带上,实现自动化传送;在侧板上固定有限位板,限位板上设置限位块,便于使载物板居中运动;在底板上设置一推动挡板,在气缸的向上推动下实现载物板的停止操作。
33.进一步地,将盛放待测样本的载物板放在传送带进料口一侧,随着阻尼电机启动,载物板跟随传送带运动,未处于中心位置的载物板在碰到限位块时会向中心移动,直到碰到被气缸顶起的挡板时停止,由于限位板的作用,载物板不会翘起,当载物板上的所有样本都检测完毕后,气缸带动挡板下降,载物板向前移动,当下一个载物板移动到适当位置后,气缸顶起挡板致使载物板)停止。
34.进一步地,所述相机为灰度或彩色相机,如果是灰度相机,在成像时,led阵列中每个led单元依次发出红、绿、蓝光,用灰度相机依次记录下对应颜色通道的图像;如果是彩色相机,在成像时,led阵列中每个led单元同时发出红绿蓝三色光,用彩色相机记录下所有彩色图像。
35.本发明还提供了一种显微成像自动化检测系统,包括:
36.传动装置将盛放待测样本的载物板传动;
37.自动化拾取机,将传动装置传送的待测样本,并拾取待测样本,将拾取的样本送入至显微成像装置进行成像处理;
38.其中,所述显微成像装置包括:包括光学平板、双轴电动载物台、单轴对焦台、双轴手动位移台、led矩阵、显微物镜、成像镜筒以及相机,所述的光学平板上固定双轴电动载物台、单轴对焦台、以及双轴手动位移台,保证双轴电动载物台、单轴对焦台、以及双轴手动位移台的相互对齐,便于扫描成像的配准及拼接;所述双轴电动载物台用于放置待显微成像的待测样本,可携带样本进行水平的x、y方向平移;所述单轴对焦台用于调整成像焦面及显微物镜与待测样本之间的距离,基于对焦算法实现采集成像过程中的微调,从而自动对焦;所述双轴手动位移台一面固定在光学平板上,另一面与led矩阵固定,用于手动调整led矩阵的方位,令led矩阵中心位于成像光轴上,便于傅里叶叠层显微成像的参数计算;所述单轴对焦台上设置显微物镜、成像镜筒以及相机;所述运动控制机与电机驱动器相连,对运动控制器发送运动指令,运动控制器将立即发送响应指令给电机驱动器,电机驱动器随后将运动指令翻译为运动脉冲,控制相对应的双轴电动载物台及单轴对焦台进行步进运动;还包括有led控制板与led矩阵相连,使用usb串口与计算机连接,通过串口根据规定的亮灯协议发送led灯点亮指令,led控制板接受并处理亮灯指令后,将根据指令要求点亮led矩阵对应的led点;
39.所述显微成像装置进行成像处理包括:机械扫描成像模式和傅里叶叠层显微模式,其中,机械扫描成像模式用于大视野快速成像,傅里叶叠层显微模式用于高分辨率成
像。
40.进一步地,所述传动装置包括运输线,所述运输线包括所述底板以及设置在两侧的侧板,两侧的侧板上设置传送带,所述的传送带张紧的放置在主动轮、从动轮和传送带垫板上,所述的传送带垫板两侧有突起,便于限制传送带的位置;通过阻尼电机携带主动同步轮转动后通过张紧同步带驱动d字轴上的从动同步轮,从而使两侧的主动轮转动;所述载物板放置在传送带上,实现自动化传送;在侧板上固定有限位板,限位板上设置限位块,便于使载物板居中运动;在底板上设置一推动挡板,在气缸的向上推动下实现载物板的停止操作。
41.进一步地,所述相机为灰度或彩色相机,如果是灰度相机,在成像时,led阵列中每个led单元依次发出红、绿、蓝光,用灰度相机依次记录下对应颜色通道的图像;如果是彩色相机,在成像时,led阵列中每个led单元同时发出红绿蓝三色光,用彩色相机记录下所有彩色图像。
42.本发明与现有技术相比,有益效果在于:
43.结构上增加全自动传动装置,无需手动放置或替换样本,可避免样本在移动过程中磨损,提升成像效率;免去手动对准样本过程,防止污损高精度待测样本影响成像效果。引入机械位移台,实现大视场甚至全景扫描,可适配不同尺寸大小的样本成像。对于彩色样本,可通过调控led阵列的不同灯光实现灰度图、彩色图的重建效果。通过自动化传动装置与显微成像装置配合,大幅度提高了产品的检测效率。
44.成像效果上,实现了大视场、高分辨等多种成像模式,可以基于实际应用场景选取合适的成像模式。重建方面引入孔径合成及相位恢复思想,在频域上实现分辨率提升及定量相位成像;引入图像融合算法,在空域实现大视场成像。
附图说明
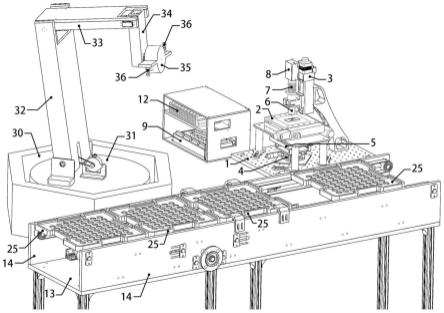
45.图1为本发明实施例提供的装置总体结构示意图
46.图2为本发明实施例提供的显微成像装置的结构示意图;
47.图3为本发明实施例提供的控制电路结构示意图;
48.图4为本发明实施例提供的传送装置模型图;
49.图5为本发明实施例提供的自动拾取机的结构示意图;
50.图6为本发明实施例提供的扫描成像步骤示意图
51.图7为本发明实施例提供的傅里叶叠层显微成像方法示意图
52.图8为机械扫描拼接融合效果图;
53.图9为傅里叶叠层重建效果图;
54.图10为自动拾取机的工作示意图。
具体实施方式
55.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
56.参见图1结合图2以及图5所示,一种基于全自动位移台的显微成像自动化检测系
统,包括:传动装置将盛放待测样本的载物板传动;自动化拾取机,将传动装置传送的待测样本,并拾取待测样本,将拾取的样本送入至显微成像装置进行成像处理;其中,显微成像装置包括包括光学平板1、双轴电动载物台2、单轴对焦台3、双轴手动位移台4、led矩阵5、显微物镜6、成像镜筒7、相机8、运动控制器9、电机驱动器10、led控制板11以及稳压电源12,
57.光学平板1打有双向等间距的螺纹孔,可使用螺栓固定所述的双轴电动载物台2、单轴对焦台2、以及双轴手动位移台4,保证上述平台的相互对齐,便于扫描成像的配准及拼接。
58.双轴电动载物台2用于放置待显微成像的待测样本,可携带样本进行水平的x、y方向平移。
59.单轴对焦台3用于调整成像焦面及显微物镜6与待测样本之间的距离,可基于对焦算法实现采集成像过程中的微调,从而自动对焦。
60.双轴手动位移台4一面固定在光学平板1上,另一面与led矩阵5固定,可用于手动调整led矩阵5的方位,令led矩阵中心位于成像光轴上,便于傅里叶叠层显微成像的参数计算。
61.参见图3所示,运动控制机9与电机驱动器10相连,操作者利用网线连接上运动控制器9后,可对运动控制器9发送运动指令,运动控制器9将立即发送响应指令给电机驱动器10,电机驱动器随后将运动指令翻译为运动脉冲,控制相对应的双轴电动载物台2及单轴对焦台3进行步进运动。
62.单轴对焦台3上设置显微物镜6、成像镜筒7以及相机8。
63.本实施例中,相机(8)为灰度或彩色相机,如果是灰度相机,在成像时,led阵列5中每个led单元5x依次发出红、绿、蓝光,用灰度相机依次记录下对应颜色通道的图像即可;如果是彩色相机,在成像时,led阵列(5)中每个led单元(5x)同时发出红绿蓝三色光,用彩色相机记录下所有彩色图像。
64.led控制板(11)与led矩阵5相连,操作者使用usb串口与计算机连接,可以通过串口根据规定的亮灯协议发送led灯点亮指令,led控制板(11)接受并处理亮灯指令后,将根据指令要求点亮led矩阵5对应的led点。
65.稳压电源12兼有dc24v及dc5v双电压输出,dc24v用于给双轴电动载物台2、单轴对焦台3、运动控制器9以及电机驱动器10供电,dc5v用于给led矩阵5、led控制板11供电。
66.参见图4所示,传动装置包括底板13、侧板14、电机固定座15、阻尼电机16、同步带17、主动同步轮18、从动同步轮19、d字轴20、主动轮21、从动轮22、传送带23、传送带垫板24、载物板225、限位板26、限位块27、气缸28以及挡板29。所述的底板13和侧板14打有大小不一的通孔和直槽孔,用于连接固定件和所述的电机固定座15和从动轮22,以便张紧同步带17和传送带23,避免出现传送带脱落或错位。
67.阻尼电机16可使用螺栓固定在电机固定座15上,通过主动同步轮18驱动d字轴20上的从动同步轮19,从而使两侧的主动轮21转动。
68.传送带23张紧的放置在主动轮21、从动轮22和传送带垫板24上,传送带垫板24两侧有突起,便于限制传送带23的位置。载物板25放置在传送带23上,实现自动化传送。
69.限位板26打有直槽孔,可使用螺栓固定在侧板14上,便于调节限位高度,防止载物板25脱离传送带。
70.限位块26打有沉头孔,可使用螺栓固定在限位板26上,便于使载物板25居中运动。
71.气缸28固定在底板13上,推动挡板29实现载物板25的停止操作。
72.将盛放待测样本的载物板25放在传送带23进料口一侧,随着阻尼电机16启动,载物板25跟随传送带23运动,未处于中心位置的载物板25在碰到限位块27时会向中心移动,直到碰到被气缸28顶起的挡板29时停止,由于限位板26的作用,载物板25不会翘起,当载物板25上的所有样本都检测完毕后,气缸28带动挡板29下降,载物板25可以向前移动,当下一个载物板25移动到适当位置后,气缸28顶起挡板29致使载物板25停止。
73.参见图5所示,自动化拾取机包括底盘30、旋转底板31、大臂32、小臂33、手腕34、机械手35、摇摆型真空吸盘36。旋转底板31通过链轮与底盘30相连,通过电机的驱动使旋转底板转动,可使机械臂进行水平方向转动。大臂32通过链轮,轴承与旋转底板31相连使大臂能进行竖直方向转动。
74.小臂33通过两个舵机与大臂32相连,减少单个舵机承重力。使小臂能稳定工作。
75.手腕34通过舵机和轴承与小臂33连接,轴承连接减少手腕的转动阻力,舵机可对手腕进行微调从而更精确的使机械手拾取样样本。
76.机械手35通过舵机与手腕34相连,机械手35上固定摇摆型真空吸盘36,便于对样本进行拾取。参见图10所示,机械臂的运行步骤包括步骤一,通过计算机械臂与载物板25上待测样本的距离,使固定在机械手35上的摇摆型真空吸盘36精准稳定的吸取待测样本。
77.步骤二,通过调整摇摆型真空吸盘36与竖直方向的角度,在保证显微物镜6不受损的情况下将待测样本放置于双轴电动载物台2上方,进行显微检测。
78.步骤三,通过摇摆型真空吸盘36先将已检测完成的样本拾取,再将另一侧的待测样本放置于双轴电动载物台2上方,进行显微检测。
79.步骤四,机械臂将检测完成的样本进行分类放置,将合格样本放置于载物板25上,将不合格的样本放置于固定地点进行处理。之后重新拾取待检测样本。
80.参见图6和图7所示,一种基于全自动位移台的显微成像自动化检测方法,包括:
81.将盛放待测样本的载物板传动至自动化拾取机拾取待测样本;
82.将拾取的样本送入至显微成像装置进行成像处理;
83.当需要对样本进行大视野快速成像时,可选用机械扫描成像模式,其特征在于步骤如下:
84.步骤11,双轴电动载物台2与相机8方向标定。与双轴电动载物台2方向平齐放置标定网格板。打开相机8采集程序,利用单轴对焦台3控制对焦后,采集一张标定网格板的清晰图片,并选取好采集图像的特征比对点pa,记录pa在图像上的坐标xa,ya。控制双轴电动载物台2向x轴方向运动,使得选取的特征对比点pa与原图像的坐标较远(但依旧在图像的视野上),记录下移动x轴后pa的坐标x
′a,y
′a。连接上述两个坐标点并计算坐标点连线相对于x轴的偏移角度θ,旋转相机对应的θ角,使得相机成像平面的x轴与位移台x轴对齐。再次采集图像选取特征对比点,控制双轴电动载物台2向x轴方向运动,纠正对应相机角度直到前后的标定点连线相对x轴的夹角为0。
85.步骤12,设计(或导入)双轴电动载物台2的扫描点列表。打开系统操作界面,开启相机实时监控以及双轴电动载物台2手动控制插件,记录特征点pb,控制双轴电动载物台2向x轴缓慢移动,使得特征点pb与图像边缘保持20%的覆盖面积,记录能实现上述保证的最
大位移距离,作为每个扫描点之间的位移长度,记为d
x
,dy。控制双轴电动载物台2从左上到右下以d
x
,dy逐个移动,同时标记好各扫描点的坐标,作为扫描点列表。
86.步骤13,在操作界面勾选扫描模式,导入在步骤二获得的扫描点列表。点击“开始采集”,首先led矩阵5将被全部点亮,以保证采集图像的亮度。随后,双轴电动载物台2将逐个移动到扫描点列表中的各点坐标上,定位后,相机(8)将被触发,采集对应扫描点的图像。
87.步骤14,扫描并采集完毕各点图像后,利用图像拼接及图像融合算法,将采集获得的多张图像拼接成一张大图,从而获得大视野甚至全视野的待测样本图像。
88.当需要对样本进行高分辨率成像时,可选用傅里叶叠层显微模式,其特征在于步骤如下:
89.步骤21,led矩阵5位置标定,将显微物镜6取下,换成磨砂玻璃对准片6x,在无待测样本的情况下单独点亮led矩阵5的中心点。打开相机8的监视页面,观察led中心点是否在视野中心,如不在,则微调双轴手动位移台4将led中心点置于相机视野中心完成位置标定。
90.步骤22,初始对焦,将磨砂玻璃对准片6x取下,换成显微物镜6,放置待测样本在显微物镜6正下方,点亮led中心点,并使用相机8观察待测样本2x的成像情况,控制单轴对焦台3调整显微物镜6到待测样本2x的焦面,使得相机8成像清晰,轮廓明朗。
91.步骤23,采集原始图像,在操作界面勾选傅里叶叠层显微成像模式。将led矩阵5作为光源,依次点亮led矩阵5中每一个led单元5x或者以led中心点为中心的对称图样点,采集对应的低分辨率原始图像。
92.步骤24,原始图像去噪,在原始图像选定两个合适的噪声roi:r1,r2,计算各原始图像rawi对应roi的图像强度均值n
i1
,n
i2
,再取n
i1
,n
i2
的均值n
i-aveg
作为原始图像rawi对应的背景噪声均值。若n
i-aveg
大于某个阈值,则认为该区域为实际信号而不是噪声,此时取n
i-1-aveg
作为rawi的近似背景噪声强度。
93.步骤25,高分辨率图像初始化,中心明场图通过上采样来初始化高分辨率图像的振幅与相位。
94.步骤26,迭代重建高分辨率图,采用基于频域叠层孔径与像素合并迭代方法将低分辨率图像在频域中逐一进行合成孔径运算,以代价函数值为判据,当代价函数小于一个给定的阈值时,停止迭代,此时的高分辨率图像的振幅与相位就是最终得到的大视场高分辨率显微图像。
95.当需要对样本进行大视野、高分辨率成像时,可结合机械扫描成像和傅里叶叠层显微模式,其特征在于步骤如下:
96.步骤31,双轴电动载物台2与相机8方向标定。与双轴电动载物台2方向平齐放置标定网格板。打开相机8采集程序,利用单轴对焦台3控制对焦后,采集一张标定网格板的清晰图片,并选取好采集图像的特征比对点pa,记录pa在图像上的坐标xa,ya。控制双轴电动载物台2向x轴方向运动,使得选取的特征对比点pa与原图像的坐标较远(但依旧在图像的视野上),记录下移动x轴后pa的坐标x
′a,y
′a。连接上述两个坐标点并计算坐标点连线相对于x轴的偏移角度θ,旋转相机对应的θ角,使得相机成像平面的x轴与位移台x轴对齐。再次采集图像选取特征对比点,控制双轴电动载物台2向x轴方向运动,纠正对应相机角度直到前后的标定点连线相对x轴的夹角为0。
97.步骤32,led矩阵5位置标定,将显微物镜6取下,换成磨砂玻璃对准片6x,在无待测
样本的情况下单独点亮led矩阵5的中心点。打开相机8的监视页面,观察led中心点是否在视野中心,如不在,则微调双轴手动位移台4将led中心点置于相机视野中心完成位置标定。
98.步骤33,初始对焦,将磨砂玻璃对准片6x取下,换成显微物镜6,放置待测样本在显微物镜6正下方,点亮led中心点,并使用相机8观察待测样本2x的成像情况,控制单轴对焦台3调整显微物镜6到待测样本8x的焦面,使得相机8成像清晰,轮廓明朗。
99.步骤34,设计(或导入)双轴电动载物台2的扫描点列表。打开系统操作界面,开启相机实时监控以及双轴电动载物台2手动控制插件,记录特征点pb,控制双轴电动载物台2向x轴缓慢移动,使得特征点pb与图像边缘保持20%的覆盖面积,记录能实现上述保证的最大位移距离,作为每个扫描点之间的位移长度,记为d
x
,dy。控制双轴电动载物台2从左上到右下以d
x
,dy逐个移动,同时标记好各扫描点的坐标,作为扫描点列表。
100.步骤35,在操作界面勾选扫描模式及傅里叶叠层显微成像模式,导入在步骤二获得的扫描点列表。在双轴电动载物台2移动到对应扫描点坐标时,将led矩阵5作为光源,依次点亮led矩阵5中每一个led单元5x或者以led中心点为中心的对称图样点,采集该扫描点下对应的低分辨率原始图像。扫描并采集完毕各点图像后,利用图像拼接将同一led点光源下采集的对应扫描图像拼接成傅里叶叠层原始图。
101.步骤36,原始图像去噪,在原始图像选定两个合适的噪声roi:r1,r2,计算各原始图像rawi对应roi的图像强度均值n
i1
,n
i2
,再取n
i1
,n
i2
的均值n
i-aveg
作为原始图像rawi对应的背景噪声均值。若n
i-aveg
大于某个阈值,则认为该区域为实际信号而不是噪声,此时取n
i-1-aveg
作为rawi的近似背景噪声强度。
102.步骤37,高分辨率图像初始化,中心明场图通过上采样来初始化高分辨率图像的振幅与相位。
103.步骤38,迭代重建高分辨率图,采用基于频域叠层孔径与像素合并迭代方法将低分辨率图像在频域中逐一进行合成孔径运算,以代价函数值为判据,当代价函数小于一个给定的阈值时,停止迭代,此时的高分辨率图像的振幅与相位就是最终得到的大视场高分辨率显微图像。
104.参见图8为机械扫描拼接融合效果图;
105.可见本发明实现了对乳腺癌细胞涂片的全景成像,有利于病理医生迅速锁定病灶、做出诊断,建立数字病理切片数据集
106.图9为傅里叶叠层重建效果图;
107.对usaf分辨率板作为样本成像,与中心明场图对比,可见傅里叶叠层重建能有效提升成像分辨率,将原本不可清晰分辨的线对由7-3提升至了9-3有效提升成像分辨率。
108.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1