一种水下机器人的大深度快插式光通信舱体结构
1.本发明涉及水下机器人技术领域,特别涉及一种水下机器人的光通信舱体结构。
背景技术:
2.光通信舱体结构是自主遥控水下机器人的重要组成部分,自主遥控水下机器人通过光通信舱体结构,经微细光纤与母船通信。光通信舱体为自主遥控水下机器人提供航行控制、应急等功能并实现光纤通信功能。
3.光通信舱体作为自主遥控水下机器人的主要耐压舱体,其尺寸、重量较大,因此要求其维护便利高,需要维护时,避免从机器人本体上拆卸整舱,避免对外接插件频繁插拔,减少人员需求的同时,避免人为失误。光通信舱体,在自主遥控水下机器人中与众多设备、舱体进行通信,其通信数据量巨大,对数据传输速率要求高,因此针对大数据量的通信采用光纤链路,其在光通信舱体内作为易损件,连通光端机与对外接口,不作为快速插拔部分,提高了维护时的安全性,防止损坏光纤链路。因光通信舱体数据量大,其内部硬件发热量大,如热量散发慢,会对内部硬件的稳定性、安全性产生影响,影响着整个水下机器人的工作稳定性,因此对光通信舱体的散热性提出了较大要求。
技术实现要素:
4.针对上述问题,本发明的目的在于提供一种水下机器人的大深度快插式光通信舱体结构,该结构相比于传统的舱体结构,具备光通信模块,传输数据量大,散热性能好,维护便利性高。
5.本发明的目的是通过以下技术方案来实现的:
6.本发明提供一种水下机器人的大深度快插式光通信舱体结构,包括耐压平盖、耐压壳体、耐压凸盖、线缆接插件、快插内芯及光通信模块,其中耐压平盖和耐压凸盖分别密封连接在耐压壳体的两端,快插内芯和光通信模块均设置于耐压壳体内,且快插内芯和光通信模块的端部通过快插连接结构连接,快插连接结构设置于耐压凸盖上,耐压凸盖上设有多个线缆接插件。
7.所述快插连接结构包括公头连接器、母头连接器及连接器底座,其中连接器底座与所述耐压凸盖的内侧连接,母头连接器设置于连接器底座上,公头连接器设置于所述快插内芯的端部,公头连接器与母头连接器实现快速对接或分离。
8.所述公头连接器上设有定位针,所述连接器底座上设有用于对定位针进行导向的导向槽。
9.所述快插内芯包括内芯框架、端板组件a、端板组件b及硬件组件,其中硬件组件设置于内芯框架上,端板组件a和端板组件b分别设置于内芯框架的两端,且端板组件a和端板组件b通过多个螺杆连接;所述公头连接器设置于端板组件a上。
10.所述端板组件a包括胀紧环a和胀紧底板a;所述端板组件b包括胀紧底板b和胀紧环b;
11.胀紧底板a和胀紧底板b分别固定连接在内芯框架的两端,胀紧环a和胀紧环b分别设置于胀紧底板a和胀紧底板b的外侧,且胀紧环a和胀紧环b通过所述螺杆连接。
12.所述胀紧环a和所述胀紧环b均为开口结构,所述胀紧环a与所述胀紧底板a及所述胀紧环b与所述胀紧底板b均为锥面(m)配合。
13.所述螺杆的一端设有螺帽,另一端设有与所述胀紧环b螺纹连接的外螺纹,所述螺杆的另一端端面设有一字槽。
14.所述硬件组件包括电源板、arm模块、交换机、声学板及pc104;所述内芯框架上还设有风扇,风扇的风向吹向耐压平盖。
15.所述光通信模块包括光端机散热板及设置于光端机散热板上的光端机及光纤收纳盒,其中光端机的两侧分别设有光端机电源板和小连接器;所述光端机散热板的端部与所述连接器底座连接。
16.所述耐压平盖、耐压壳体和耐压凸盖均采用钛合金材料,相互之间通过o形圈密封。
17.本发明的优点与积极效果为:
18.1.本发明适用性广:本发明舱体结构可耐6000米水深压力,覆盖了全球大部分海洋区域。
19.2.本发明数据传输速率块:本发明舱体具备光通信模块,其传输稳定、数据传输速率较传统电信号明显增强。
20.3.本发明维护便利性高:光通信舱体结构内部硬件需要维护时,无需将整个舱体从水下机器人上拆除,只需将快插内芯从平盖端拔除即可快速将核心硬件拿出。对外接插件无需插拔,减少人员误插。
21.4.本发明结构安全性高:插拔内芯连接器连通后,内芯可通过胀紧环与耐压壳体胀紧,内部固定稳固,不易松动,经长途运输后,不会造成内芯松动。
附图说明
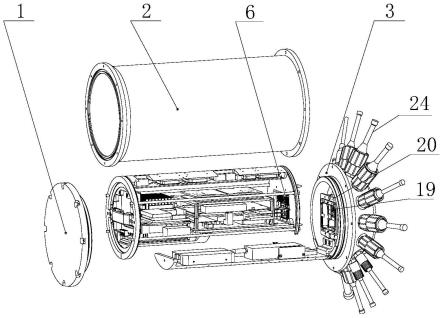
22.图1为本发明一种水下机器人的大深度快插式光通信舱体结构的爆炸图;
23.图2为本发明中快插内芯的结构示意图;
24.图3为本发明中端板组件的剖视图;
25.图4为本发明中端板组件的分解图;
26.图5为本发明中光通信模块的结构示意图;
27.图6为本发明中耐压凸盖的结构示意图;
28.图中:1为耐压平盖,2为耐压壳体,3为耐压凸盖,4为电源板,5为arm模块,6为公头连接器,7为定位针,8为胀紧环a,9为胀紧底板a,10为螺杆,11为交换机,12为声学板,13为胀紧底板b,14为胀紧环b,15为风扇,16为pc104,17为光端机,18为光端机电源板,19为母头连接器,20为连接器底座,21为光端机散热板,22为小连接器,23为光纤收纳盒,24为线缆接插件。
具体实施方式
29.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实例对本
发明进行详细描述。
30.如图1所示,本发明提供的一种水下机器人的大深度快插式光通信舱体结构,包括耐压平盖1、耐压壳体2、耐压凸盖3、线缆接插件24、快插内芯及光通信模块,其中耐压平盖1和耐压凸盖3分别密封连接在耐压壳体2的两端,快插内芯和光通信模块均设置于耐压壳体2内,且快插内芯和光通信模块的端部通过快插连接结构连接,快插连接结构设置于耐压凸盖3上,耐压凸盖3上设有多个线缆接插件24。
31.如图1所示,本发明的实施例中,快插连接结构包括公头连接器6、母头连接器19及连接器底座20,其中连接器底座20与耐压凸盖3的内侧连接,母头连接器19设置于连接器底座20上,公头连接器6设置于快插内芯的端部,公头连接器6与母头连接器19实现快速对接或分离。
32.进一步地,公头连接器6上设有定位针7,连接器底座20上设有用于对定位针7进行导向的导向槽。
33.如图2所示,本发明的实施例中,快插内芯包括内芯框架、端板组件a、端板组件b及硬件组件,其中硬件组件设置于内芯框架上,端板组件a和端板组件b分别设置于内芯框架的两端,且端板组件a和端板组件b通过多个螺杆10连接;公头连接器6设置于端板组件a上。
34.本发明的实施例中,硬件组件包括arm模块5、交换机11、声学板12及pc10416;内芯框架上还设有风扇15,风扇15的风向吹向耐压平盖1,实现舱内空气对流,硬件均匀受热,热量与舱体充分接触,热量可通过耐压平盖1散出。
35.如图3-4所示,本发明的实施例中,端板组件a包括胀紧环a8和胀紧底板a9;端板组件b包括胀紧底板b13和胀紧环b14;胀紧底板a9和胀紧底板b13分别固定连接在内芯框架的两端,胀紧环a8和胀紧环b14分别设置于胀紧底板a9和胀紧底板b13的外侧,且胀紧环a8和胀紧环b14通过螺杆10连接。
36.进一步地,胀紧环a8和胀紧环b14均为开口结构,胀紧环a8与胀紧底板a9及胀紧环b14与胀紧底板b13均为锥面m配合。螺杆10的一端设有螺帽,另一端设有与胀紧环b14螺纹连接的外螺纹,螺杆10的另一端端面设有一字槽。通过螺杆10调节,可调节胀紧环a8与胀紧环b14的外径,从而实现快插内芯与耐压壳体2之间胀紧与否,实现快插内芯的固定。
37.具体地,胀紧环a8与胀紧底板a9锥面接触,胀紧环b14与胀紧底板b13锥面接触,胀紧环a8与胀紧环b14通过四根螺杆10相连,通过松紧螺杆10,可以调节胀紧环a8与胀紧环b14的间距,来调整胀紧环a8和胀紧底板a9及胀紧环b14和胀紧底板b13间锥面接触距离,从而调节胀紧环a8与胀紧环b14的胀紧程度,实现胀紧环a8与胀紧环b14与耐压壳体2内壁间的固定。四根螺杆10一端为外六角螺帽,另一端为螺纹,在螺纹平端面上另做一字切口,可通过一字螺丝刀在螺纹端面松紧。需要维护快插内芯时,在螺纹端面松开四个螺杆10,螺杆10在胀紧底板b13的螺纹作用下,顶在耐压凸盖2上,实现快插内芯的退出。
38.如图5所示,本发明的实施例中,光通信模块包括光端机散热板21及设置于光端机散热板21上的光端机17及光纤收纳盒23,其中光端机17的两侧分别设有光端机电源板18和小连接器22;光端机散热板21的端部与连接器底座20连接。
39.具体地,如图6所示,耐压凸盖3与线缆接插件24相连,提供对外接口,其中包含1路光纤接口。线缆接插件24中各线缆与母头连接器焊接,线缆布置在耐压凸盖3的内部空腔。线缆接插件24中的光纤通过耐压凸盖3进舱后,过长的光纤可以收纳在光纤收纳盒23,防止
快插内芯插拔时,损坏光纤。光通信模块与耐压凸盖3通过螺钉固定一起,光端机需要维护时,光端机17、光端机电源板18、光端机散热板21、光纤收纳盒23可通过小连接器22与母头连接器19和耐压凸盖3分离。母头连接器19与线缆接插件24相应电缆焊接后,通过连接器底座20固定在耐压凸盖3上。其中连接器底座20有导向槽,配合快插内芯中的定位针7,可以实现快插内芯与母头连接器19的对位安装。
40.本发明的实施例中,耐压平盖1、耐压壳体2和耐压凸盖3均采用钛合金材料,相互之间通过o形圈密封,通过o形圈对内部硬件起到密封作用,舱体强度可耐6000米水深压力。本实施例中,公头连接器6、母头连接器19为市购产品,购置于中航光电,型号为j16-4-b型。
41.本发明的工作原理为:
42.整个光通信舱体平放于水下机器人载体上,其中快插内芯包含了整个舱体硬件的主体部分,当需要对快插内芯拆卸维护时,首先分离耐压平盖1,再通过调节四根螺杆10分离公头连接器6与母头连接器19,即可直接拉出整个快插内芯进行维护。维护完成需要归位安装时,将快插内芯通过定位针7与连接器底座20的导向槽对准后,直接插紧,拧紧胀紧底板b13与光端机散热板21可进一步将快插内芯向内推,完成公头连接器6与母头连接器19的连通,继而通过调节四根螺杆10,实现快插内芯与耐压壳体2间的固定,最后恢复耐压平盖1的安装。整个拆装过程,无需将较重的光通信舱体从载体上整体卸除,无需断开线缆接插件24,只需操作耐压平盖1与快插内芯即可,提高了光通信舱体的维护便利性。光通信舱体内部装有光端机模块,可通过光纤与外部设备通讯,传输稳定,传输速率高,尤其适用于自主遥控潜水器(arv)的实时数据传输。其主要耐压壳体,适用于6000米水深,可涵盖大部分海域,适用性较高。另外,快插内芯通过胀紧环胀紧与内部耐压壳体2间连接稳固,经过运输、试验等,不易松动。针对硬件中产热较大的模块,包括电源板4与光端机17,均与散热板直连,散热板与耐压壳体2接触,直接导热,散热效果好。
43.综上所述,本发明给出了一种水下机器人的大深度快插式光通信舱体结构,它具有应用范围广,传输速率高,便于拆装维护等优点。耐压舱体耐6000米水深,可以覆盖全球大范围海洋区域,耐压舱体分为耐压平盖、耐压壳体和耐压凸盖三部分,耐压凸盖上安装插拔式接插件,提供对外线缆接口,耐压凸盖内安装快插式母头连接器,与接插件线缆焊接一体,通过公母连接器,与快插内芯对接,光通信模块存在光纤等易损坏部件,不作为快插结构,与耐压凸盖固定一起,作为固定端。快插内芯为各电路板、设备集成体,固定于内芯框架上。
44.本发明集成光通信模块,通讯速率高;开舱方便,内芯可插拔,方便维护与换装;耐压舱适用于大深度水下使用,可耐6000米水深;整体布局紧凑,节省舱体安装空间。
45.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1