基于位置状态判断法实现大型望远镜断电位置记忆的方法
1.本发明涉及一种基于位置状态判断法实现大型望远镜断电位置记忆的方法,具体涉及一种利用单圈绝对式编码器并结合位置状态判断来实现在异常断电情况下望远镜位置记忆的方法。
背景技术:
2.大型望远镜是天文学家观测更加遥远暗弱的天体,同时获得更高分辨率必不可少的高精密科学仪器。编码器是当前最常用的检测望远镜精确转动位置的传感器之一,按照输出信号类型分可分为绝对式编码器和增量式编码器。其中,绝对式编码器输出绝对码值信号,而增量式编码器输出的是脉冲信号。绝对式编码器按圈数分可分为单圈绝对式编码器和多圈绝对式编码器。
3.单圈绝对式编码器输出量程是0~360
°
,固定位置对应唯一的输出,当转动范围超过360
°
,不做叠加处理的情况下输出位置等于首圈对应位置输出值,且断电时叠加位置值不能被保存。多圈绝对式编码器输出量程大于360
°
,当转动范围超过360
°
时,输出位置在原有一圈的基础上进行叠加得到的输出值,且该叠加值可以被保存。二者在工作原理上存在差别,多圈绝对式编码器是在单圈绝对式编码器的基础上通过机械传感原理实现,利用钟表齿轮机械原理结构制作而成。例如,单圈绝对式编码器是只带有秒针的机械时钟,只能记录一圈的位置,而多圈绝对式编码器是带有秒针和分针的机械时钟,能记录单圈位置的同时还能记录圈数。
4.多圈绝对式编码器相较于单圈绝对式编码器的优点是测量范围大,不受行程的限制,缺点是成本高,且目前受口径的限制。绝对式编码器相较于增量式编码器的优点是无需找零位,操作方便快捷。同时,单圈绝对式编码器在不发生断电行为情况下可通过位置叠加实现多圈位置记录,可一旦发生突发断电的情况单圈绝对式编码器只能记录当前对应的单圈位置值,且无法记录负值,而多圈绝对式编码器在断电重启的情况下依然能记录断电前的多圈位置。但是,由于种种原因,多圈绝对式编码器无法在特定环境下稳定工作,加之目前尚缺乏工艺难度极高的大口径多圈绝对式编码器,特定场景下只能利用单圈绝对式编码器。
5.例如,大型望远镜口径越做越大,为了保持更高的跟踪精度,对编码器的分辨率就要求越高。而编码器分辨率与其刻线数有关,编码器口径越大,则刻线数越多,分辨率则越高。但受限于当前多圈绝对式编码器口径,单圈绝对式编码器成了为数不多的选择之一。大型地平式望远镜为实现全天区观测覆盖观测,方位轴运转范围需超过360
°
且需覆盖负值位置和大于360
°
位置,而单圈绝对式编码器无法实现异常断电情况下负值和超360
°
的位置记忆,故如何利用单圈绝对式编码器实现在突发断电情况下全范围位置记忆成为了亟待解决的问题。
技术实现要素:
6.本发明的目的是利用单圈绝对式编码器提供一种基于位置状态判断法实现大型望远镜在异常断电情况下的全范围位置记忆方法。该方法可在异常常断电的情况下利用单圈绝对式编码器实现大型望远镜位置记忆的目的,以便在重新上电后及时获取望远镜准确位置信息。
7.为实现上述目的,本发明提供如下技术方案:
8.基于位置状态判断法实现大型望远镜断电位置记忆的方法,包括如下步骤:
9.望远镜方位轴安装单圈绝对式编码器,且编码器安装多个读数头,方位轴运转范围为azlimitnegative
°
~azlimitpositive
°
,其中-360《azlimitnegative《0,360《azlimitpositive《720;
10.系统上电初始化表示位置状态的关键字statetag=null,并将statetag值写入本地计算机文本文档;
11.方位轴电机开始运行,上位机程序从控制器中读取编码器实时位置,并记为α,若azlimitnegative≤α《0,则statetag=false;若0≤α《360,则statetag=null;若360≤α≤azlimitpositive,则statetag=true;并将statetag的值实时覆盖写入文本文档;
12.当控制系统发生异常断电行为时,读取方位轴当前位置为β,同时程序读取文本文档中记录的关键字statetag值,计算断电前方位轴位置α'。
13.进一步的,上位机开始运行,则系统初始化表示方位轴位置状态的关键字statetag=null,同时在本地上位机中新建文本文档azstatetag.txt,将statetag值写入文本文档并保存。
14.进一步的,当方位轴开始运行,上位机程序从控制器中实时读取编码器实时位置,并记为α,若azlimitnegative≤α《0,即望远镜方位轴当前位置为负值范围内,则将statetag设定为false;若0≤α《360,即望远镜方位轴当前位置为正值且不满一圈范围内,则将statetag设定为null;若360≤α≤azlimitpositive,即望远镜方位轴当前位置为正值且超过一圈范围内,则将statetag设定为true;statetag的值随望远镜方位轴位置实时更新并覆盖写入文档。
15.进一步的,当望远镜控制系统发生异常断电行为时,望远镜方位轴可处于运行范围azlimitnegative
°
~azlimitpositive
°
的任何位置,但其所处位置状态信息已经被保存至本地计算机磁盘;系统再次上电时,程序自动读取文本文档azstatetag.txt中的值并赋值给关键字statetag,同时接收来自编码器实时位置信息为β(β≥0);当statetag=false,则异常断电前方位轴位置α'=β-360;当statetag=null,则α'=β;当statetag=true,则α'=β+360。
16.进一步的,系统上电检查数据通讯无异常后,程序初始化表示位置状态的关键字statetag=null,同时在本地计算机磁盘中新建文本文件,并命名为azstatetag.txt,且将statetag的值写入该文件;
17.望远镜方位轴开始运行,上位机通过定时器实时读取编码器位置信息并赋值给变量currentposition,程序判断currentposition的值是否小于0且大于等于azlimitnegative,若成立,则将关键字statetag赋值为false,即statetag=false;程序再次判断currentposition的值是否大于等于0且小于360,若成立,则将关键字statetag赋值
为null,即statetag=null;程序又一次判断currentposition的值是否大于等于360且小于等于azlimitpositive,若成立,则将关键字statetag赋值为true,即statetag=true;同时将statetag的值实时覆盖写入azstatetag.txt文本文件中;
18.当望远镜发生异常断电行为时,程序自动读取azstatetag.txt文本文件中的值并将其赋值给关键字statetag;同时上位机通过定时器读取的编码器位置信息赋值给变量recurrentposition,同时设系统异常断电前的位置为precurrentposition,此时程序判断关键字statetag的值;若statetag=false,则precurrentposition=recurrentposition-360;若statetag=null,则precurrentposition=recurrentposition;若statetag=true,则precurrentposition=recurrentposition+360。
19.进一步的,在望远镜异常断电的情况下利用单圈绝对式编码器实现全范围位置记忆,特别适用于当望远镜方位轴处于负值位置突然断电的情况。
20.与现有技术相比,本发明的有益效果是:
21.本发明利用单圈绝对式编码器提供一种基于位置状态判断法实现大型望远镜在异常断电情况下的全范围位置记忆方法。与现有方法相比,本发明的方法可在异常断电的情况下利用单圈绝对式编码器实现大型望远镜断电记忆全范围位置,该方法在大型望远镜等同种类型旋转平台的精密运行控制领域具有广泛应用前景,在设备异常断电情况下依然可提供包含负值、正值且不满一圈和超一圈范围位置的全范围信息。
附图说明
22.图1是设备运行原理图;
23.图2是本发明的方法设计原理图;
24.图3是本发明的软件设计原理图。
25.图中标记:1-上位机;2-控制器;3-驱动器;4-望远镜方位轴转台;5-单圈绝对式编码器。
具体实施方式
26.下面结合附图对本发明作进一步详细说明。
27.受某些极端环境下的应用限制,加之目前尚没有大口径多圈绝对式编码器,故单圈绝对式编码器需要实现多圈绝对式编码器的应用效果。现有技术中利用单圈绝对值编码器实现断电记忆的方法需要用到备用电源,但该方法在极端环境下,例如超低温会影响电源的正常工作。故本发明提供一种基于为位置状态判断法实现大型望远镜断电位置记忆的方法,具体涉及一种利用单圈绝对式编码器并结合位置状态判断来实现在异常断电情况下望远镜位置记忆的方法。该方法可在异常断电的情况下利用单圈绝对式编码器实现大型望远镜位置记忆的目的,以便在重新上电后及时获取望远镜准确位置信息。本发明特别适用于当大型望远镜方位轴处于负值和超一圈范围位置突然断电的情况。
28.本发明受到了国家自然科学基金项目“极端环境下极大望远镜直接驱动系统非预期状态演化研究及评价方法”(11973065)、“南极大口径望远镜潜隐故障预警及无缝智能自愈策略的研究”(11373052)、“大型天文光学望远镜控制系统智能化研究”(u1931207)和江苏省卓越博士后计划的资助。
29.下面结合附图和实施案例对本发明进一步说明。
30.单圈绝对式编码器5与望远镜方位轴转台4的电机进行同轴安装,编码器反馈位置即为方位轴位置,信号读取采用多读数头均布安装方式。读数头将位置信息反馈给控制器2,控制器根据位置反馈经驱动器3控制电机运行,上位机1与控制器通过千兆光纤网络进行通讯。系统运行基本原理如图1所示。上位机软件运行在上位机中,上位机通过千兆光纤网络与控制器进行通讯,控制器下游接电机驱动器,进而驱动方位轴电机转动。单圈绝对式编码器与电机同轴安装,编码器通过读数头读取的电机位置信息被控制器获取,进而被上位机软件读取并显示。
31.对于大型望远镜,望远镜控制系统上位机经控制器、驱动器连接方位轴转台的电机,电机与单圈绝对式编码器同轴安装,编码器的读数头将位置信息反馈给控制器,方位轴转动范围为azlimitnegative
°
~azlimitpositive
°
,其中-360《azlimitnegative《0,360《azlimitpositive《720,即编码器运转超过360
°
。由于单圈绝对式编码器无法在望远镜控制系统异常断电的情况下实现方位轴负值和超一圈范围的位置记忆,即当望远镜方位轴运行在azlimitnegative~0
°
和360~azlimitpositive
°
区间时发生异常断电行为,上电后系统显示的是编码器该绝对的正值位置,这样则会导致望远镜位置显示紊乱,进而影响望远镜正常运行。且该情况对于远程控制的望远镜是致命的,继续操作容易造成设备故障或不可逆的损害。
32.本发明涉及技术方法实现原理如图2所示,包括如下步骤:
33.望远镜方位轴安装单圈绝对式编码器,且运转范围为azlimitnegative
°
~azlimitpositive
°
,其中-360《azlimitnegative《0,360《azlimitpositive《720;
34.系统上电则初始化表示方位轴位置状态的关键字statetag=null,同时在本地上位机中新建文本文档azstatetag.txt,将statetag值写入文本文档并保存;
35.当方位轴开始运行,上位机程序实时读取单圈绝对式编码器实时位置,并记为α,若azlimitnegative≤α《0,即望远镜方位轴当前位置为负值范围内,则将statetag设定为false;若0≤α《360,即望远镜方位轴当前位置为正值且不满一圈范围内,则将statetag设定为null;若360≤α≤azlimitpositive,即望远镜方位轴当前位置为正值且超过一圈范围内,则将statetag设定为true;statetag的值随望远镜方位轴位置实时更新并覆盖写入文档;
36.当望远镜控制系统发生非正常断电行为时,望远镜方位轴可处于运行范围azlimitnegative
°
~azlimitpositive
°
的任何位置,但其所处位置状态信息已经被保存至本地计算机磁盘;系统再次上电时,程序自动读取文本文档azstatetag.txt中的值并赋值给关键字statetag,同时接收来自编码器实时位置信息为β(β≥0);当statetag=false,则异常断电前方位轴位置α'=β-360;当statetag=null,则α'=β;当statetag=true,则α'=β+360。
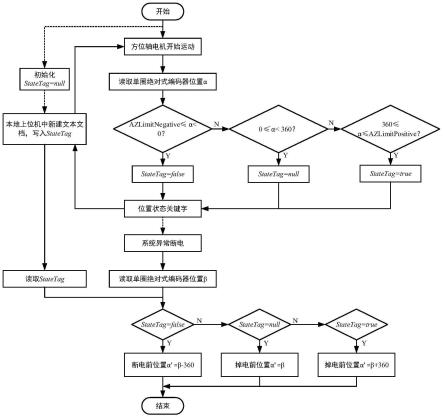
37.本发明还包含相关的软件设计方案,并依据上述设计的方案编写程序,程序设计原理如图3所示,具体包括:
38.系统开始运行,检查数据通讯无异常后,程序初始化表示位置状态的关键字statetag=null,同时在本地计算机磁盘中新建文本文件,并命名为azstatetag.txt,且将statetag的值写入该文件。程序初始化表示位置状态的关键字statetag=null,同时在本
地计算机磁盘中新建文本文件,并命名为azstatetag.txt,且将statetag的值写入该文件。
39.望远镜方位轴开始运行,上位机通过定时器实时读取编码器位置信息并赋值给变量currentposition,程序判断currentposition的值:if(azlimitnegative≤currentposition《0),thenstatetag=false;if(0≤currentposition《360),thenstatetag=null;if(360≤currentposition≤azlimitpositive),thenstatetag=true;同时将statetag的值实时覆盖写入azstatetag.txt文本文件中;
40.当望远镜发生异常断电行为时,程序自动读取azstatetag.txt文本文件中的值并将其赋值给关键字statetag;同时上位机通过定时器读取的编码器位置信息赋值给变量recurrentposition,同时设系统异常断电前的位置为precurrentposition,此时程序判断关键字statetag的值:if(statetag=false),thenprecurrentposition=recurrentposition-360;if(statetag=null),thenprecurrentposition=recurrentposition;if(statetag=true),thenprecurrentposition=recurrentposition+360。
41.综上所述,本发明是一种利用单圈绝对式编码器并基于位置状态判断法实现大型望远镜在异常断电情况下全范围位置记忆的方法。该方法包括:初始化表示位置状态的关键字statetag为null,并将该关键字的值写入本地计算机文本文档;通过编码器显示位置判断望远镜方位轴位置状态,同时实时更新表示位置状态的关键字的值并覆盖写入文本文档;系统异常断电重启,望远镜方位轴可能处于可运行区间的任何位置,程序读取文本文档中关键字的值,结合当前编码器显示位置信息即可计算出断电前望远镜方位轴真实位置。本发明还包含相关的软件设计方案,并依据上述设计原理编写程序。本发明实现了利用单圈绝对式编码器并基于位置状态判断法在大型望远镜非正常断电情况下全范围位置记忆的目的。
42.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1