光学对位方法及光学对位装置与流程
1.本技术涉及光学对位技术领域,具体而言,涉及一种光学对位方法及光学对位装置。
背景技术:
2.偏光元件能够使特定偏振方向的光透过或改变光之偏振态,将两个偏光元件进行贴合时,需要先将两个偏光元件进行对位,以使二者的偏光轴呈预设夹角。通常通过检测激光依次经两个偏光元件后出射光的强度,来判断两个偏光元件是否对位成功。
3.然而,现有的光学对位方法中,激光依次经两个偏光元件后的出射光中,既包含形成待检测的光斑的一次穿透光,还包含形成鬼影的多次折返光。因此,现有的光学对位方法中出射光的强度无法真正反应两个偏光元件的偏光轴对位的准确性,导致两个偏光元件的贴合异常。
技术实现要素:
4.本技术第一方面提供一种光学对位方法。该光学对位方法包括:
5.将第一工件和第二工件间隔设置,其中所述第一工件包括第一偏光元件,所述第二工件包括第二偏光元件;
6.获取激光依次经过所述第一工件和所述第二工件后的出射光束的图像;以及
7.判断所述出射光束的图像中是否存在与待检测光斑重叠的鬼影,若所述出射光束的图像中存在鬼影,则调整所述第一工件和所述第二工件的距离,使所述鬼影在所述出射光束的图像中消失;若所述出射光束的图像中不存在鬼影,则检测所述待检测光斑的强度,以判断所述第一工件和所述第二工件是否对位成功。
8.该光学对位方法通过调整第一工件和第二工件的距离,使鬼影在出射光束的图像中消失,可避免鬼影对第一工件和第二工件是否对位成功的影响,提升第一工件和第二工件对位的准确度,避免第一工件和第二工件的贴合异常。
9.本技术第二方面提供一种光学对位装置。该光学对位装置包括:
10.光源,用于出射激光;
11.第一治具,用于固定第一工件,所述第一工件包括第一偏光元件;
12.第二治具,用于固定第二工件,所述第二工件包括第二偏光元件,所述激光依次经过所述第一工件和所述第二工件后得到出射光束;
13.光学感测器,用于获取所述出射光束的图像,并用于检测所述出射光束的图像中待检测光斑的强度,以判断所述第一工件和所述第二工件是否对位成功;以及
14.调整平台,用于在所述出射光束的图像中存在与所述待检测光斑重叠的鬼影时,调整所述第一工件和所述第二工件之间的距离,以使鬼影在所述出射光束的图像中消失。
15.该光学对位装置中,调整平台能够在出射光束的图像中存在与所述待检测光斑重叠的鬼影时,调整所述第一工件和所述第二工件之间的距离,以使鬼影在所述出射光束的
图像中消失,可避免鬼影对第一工件和第二工件是否对位成功的影响,提升第一工件和第二工件对位的准确度,避免第一工件和第二工件的贴合异常。
附图说明
16.图1为本技术一实施例的光学对位方法的流程示意图。
17.图2a和图2b分别为第一工件和第二工件在特定距离时的光路示意图和出射光束的图像示意图。
18.图3为光线的入射角度、入射高度及出射角度的示意图。
19.图4a至图4g分别为第一工件和第二工件在不同距离下的光路示意图和出射光束的图像示意图。
20.主要元件符号说明:
21.光学对位装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
22.光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110
23.聚焦透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120
24.光学检测器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130
25.第一工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210
26.第一偏光元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211
27.透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212
28.部分穿透部分反射元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
213
29.第二工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220
30.第二偏光元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
222
31.光轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
x
32.第一表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
s1
33.第二表面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
s2
34.预设角度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
α
35.待检测光斑
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
p1
36.鬼影
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
g1、g2
37.一次穿透光
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l1
38.一次折反射光
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l2
39.二次折反射光
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l3
40.距离
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀd41.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
42.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。
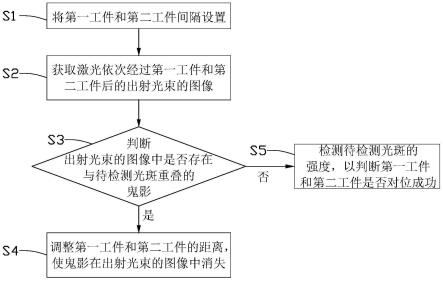
43.图1为本技术一实施例的光学对位方法的流程示意图。如图1所示,该光学对位方法包括以下步骤s1至s5。
44.步骤s1:将第一工件和第二工件间隔设置。
45.步骤s2:获取激光依次经过第一工件和第二工件后的出射光束的图像。
46.步骤s3:判断出射光束的图像中是否存在与待检测光斑重叠的鬼影。若出射光束的图像中存在鬼影,则执行步骤s4,否则执行步骤s5。
47.步骤s4:调整第一工件和第二工件的距离,使鬼影在出射光束的图像中消失。
48.步骤s5:检测待检测光斑的强度,以判断第一工件和第二工件是否对位成功。
49.以下结合图2a至图4g具体说明。
50.具体地,步骤s1中,将第一工件210和第二工件220放置到光学对位装置100中。
51.如图2a所示,第一工件210包括第一偏光元件211、透镜212和部分穿透部分反射元件213。透镜212包括相对的第一表面s1和第二表面s2。第一表面s1为凹面,第二表面s2为凸面。第一偏光元件211设置于第一表面s1上。部分穿透部分反射元件213设置于第二表面s2上。第二工件220包括第二偏光元件222。第一偏光元件211位于第一表面s1和第二偏光元件222之间,且第一偏光元件211和第二偏光元件222之间具有空气间隔。该光学对位方法用于使第一偏光元件211的偏光轴和第二偏光元件222的偏光轴对位。其他实施例中,第一表面s1为凸面,第二表面s2为凹面。
52.一些实施例中,部分穿透部分反射元件213为镀设在透镜212的第二表面s2的半透半反射膜。第一偏光元件211为贴合在透镜212第一表面s1的相位延迟片(如,四分之一波片)。第二偏光元件222为反射式偏振元件。其他实施例中,第二工件220可包括另一透镜,第二偏光元件222设置在该另一透镜朝向透镜212的表面上。
53.光学对位装置100包括依序间隔设置的光源110、第一治具(图未示)、第二治具(图未示)、聚焦透镜120和光学检测器130。第一治具用于固定第一工件210,第二治具用于固定第二工件220。沿光源110指向光学检测器130的方向依次为光源110、第一治具、部分穿透部分反射元件213、透镜212、第一偏光元件211、第二偏光元件222、第二治具、聚焦透镜120和光学检测器130。
54.光源110为激光光源,用于出射激光。第一治具和第二治具均设置有透光孔。一些实施例中,光源110出射的为准直平行光。
55.步骤s2中,光源110出射的激光经第一治具的透光孔至第一工件210后入射至第二工件220,再经第二工件220后形成出射光束。其中出射光束从第二治具的透光孔出射至聚焦透镜120,然后经聚焦透镜120汇聚至光学检测器130。光学检测器130能够获取出射光束的图像,并用于探测出射光束的强度,以判断第一工件210和第二工件220是否对位成功。如图2a所示,第一工件210和第二工件220具有共同的光轴x。光源110出射的激光与光轴x呈预设角度α。
56.一些实施例中,预设角度α大于等于0度小于等于10度(如4度、6度、8度)。通过使激光的出射光束与光轴x相对倾斜,可使激光在第一偏光元件211和第二偏光元件222之间的部分折返光偏离光学检测器130的感测范围,减少鬼影或杂散光的干扰。
57.需要说明的是,虽然激光的出射光束与光轴x相对倾斜可使部分折返光偏离光学检测器130的感测范围,然而由于透镜212的弯曲形状的差异以及部分穿透部分反射元件213的设置,使得激光在第一偏光元件211和第二偏光元件222之间存在折反射光,导致激光经第一工件210和第二工件220后的出射光线中,存在多次折反射光,造成鬼影的问题。而本技术实施例的光学对位方法,可通过调整第一工件210和第二工件220的距离d,使鬼影在出
射光束的图像中消失,进一步减少鬼影的干扰。
58.具体地,如图2a所示,从光源110出射的激光经第一工件210和第二工件220后的出射光束包括一次穿透光l1、一次折反射光l2和二次折反射光l3。
59.一次穿透光l1的光路如下:光源110出射的激光依次透过部分穿透部分反射元件213、透镜212、第一偏光元件211、第二偏光元件222后形成一次穿透光l1,该一次穿透光l1经聚焦透镜120汇聚至光学检测器130上,并构成出射光束的图像中的主影或者称待检测光斑p1(示出在图2b中)。
60.一次折反射光l2的光路如下:光源110出射的激光透过第一工件210的部分穿透部分反射元件213、透镜212、第一偏光元件211后入射至第二偏光元件222,然后经第二偏光元件222再次反射回第一工件210,再经第一工件210的部分穿透部分反射元件213再次反射回第二偏光元件222,然后穿透第二偏光元件222,经聚焦透镜120汇聚至光学检测器130上,形成为出射光束的图像中的鬼影g1(示出在图2b中)。
61.二次折反射光l3的光路如下:光源110出射的激光透过第一工件210的部分穿透部分反射元件213、透镜212、第一偏光元件211后入射至第二偏光元件222,然后经第二偏光元件222再次反射回第一工件210,再经第一工件210的部分穿透部分反射元件213再次反射回第二偏光元件222,然后再次被第二偏光元件222反射回第一工件210,再经第一工件210的部分穿透部分反射元件213再次反射回第二偏光元件222,然后穿透第二偏光元件222,经聚焦透镜120汇聚至光学检测器130上,形成为出射光束的图像中的鬼影g2(示出在图2b中)。
62.如图3所示,根据几何近轴光线方程式,光线的出射光角度u’的计算由以下三者决定:光线的入射高度y,光线入射的折射率n,以及光线的入射角度u。由于光源110出射的激光会在第一工件210的部分穿透部分反射元件213和第二偏光元件222之间多次折反射,且一次穿透光l1和折反射光(尤其是二次折反射光l3)在光路中入射至第二偏光元件222时的高度y和角度u接近,使得二者从第二偏光元件222中出射的角度u’类似,进而导致一次穿透光l1形成的主影与折返光形成的鬼影g1、鬼影g2等无法有效分离。
63.该光学对位方法中,若步骤s3中,判断得到出射光束的图像中存在与待检测光斑p1重叠的鬼影g1。那么执行步骤s4,调整第一工件210和第二工件220的距离d,以通过调整部分穿透部分反射元件213和第二偏光元件222的距离d,使一次穿透光l1和折反射光(尤其是二次折反射光l3)在光路中入射至第二偏光元件222时的高度y和角度u的差异拉大,进而使鬼影g1、鬼影g2等偏离光学检测器130的检测范围,将鬼影g1、鬼影g2等和待检测光斑p1分离开,从出射光束的图像中消失。
64.具体地,图4a至图4g分别为预设角度α为4度,第一工件210中部分穿透部分反射元件213和第二偏光元件222的距离d在23mm、22mm、21mm、20mm、19mm、18mm、17mm的情况下的光路图。图4a至图4g中右侧的图分别为对应左侧图的光学检测器130获得的出射光束的图像。由图4a至图4g可知,随着第一工件210中部分穿透部分反射元件213和第二偏光元件222的距离d由17mm逐渐变大,鬼影g1、鬼影g2与待检测光斑p1(或者说主影)逐渐分离,当第一工件210中部分穿透部分反射元件213和第二偏光元件222的距离d为22mm和23mm时,鬼影g1鬼影g2已被完全分离,并从出射光束的图像中消失。
65.可理解地,出射光束中不只包括一次折反射光l2和二次折反射光l3,可能还包含三次折反射光、四次折反射光等。其中,三次折反射光、四次折反射光等或者因光强太弱被
忽略,或者也可通过调整第一工件210和第二工件220的间距,使其偏离光学检测器130的感测范围,而与主影分离。
66.一些实施例中,光学对位装置100包括调整平台(图未示)。该调整平台能够使第一治具和第二治具产生相对位移,进而能够在光学检测器130感测的出射光束的图像中存在与待检测光斑p1重叠的鬼影时,调整第一工件210和第二工件220之间的距离d,以使鬼影在出射光束的图像中消失。
67.具体地,调整平台例如包括驱动单元,该驱动单元能够带动第一治具朝向靠近第二治具的方向移动,或者带动第一治具朝向远离第二治具的方向移动。可理解地,调整平台也可带动第二治具朝向靠近或远离第一治具的方向移动,以调整第一工件210和第二工件220之间的距离。
68.此外,若步骤s3中判断获得出射光束的图像中不存在与待检测光斑p1重叠的鬼影,则执行步骤s5,检测待检测光斑p1的强度,以判断第一工件210和第二工件220是否对位成功。
69.可理解地,当第一偏光元件211和第二偏光元件222的偏光轴未达到特定夹角时,光源110出射的激光经第一工件210和第二工件220后,出射光束的强度较大;而当第一偏光元件211和第二偏光元件222的偏光轴达到特定夹角时,光源110出射的激光经第一工件210和第二工件220后,出射光束的强度最小。
70.一些实施例中,若光学检测器130探测到出射光束的强度达到预设值,则表明第一偏光元件211和第二偏光元件222对位成功;否则调整第一偏光元件211和第二偏光元件222之间的夹角,直至第一偏光元件211和第二偏光元件222对位成功。
71.一些实施例中,调整第一偏光元件211和第二偏光元件222之间的夹角的步骤,例如通过调整平台实现。调整平台还包括旋转驱动单元,该旋转驱动单元例如为电动机,其能够带动第一治具相对第二治具旋转,进而调整第一偏光元件211和第二偏光元件222之间的夹角。可理解地,一些实施例中,旋转驱动单元也可带动第二治具相对第一治具旋转,以调整第一偏光元件211和第二偏光元件222之间的夹角。
72.一些实施例中,步骤s5中确认第一工件210和第二工件220对位成功后,该光学对位方法还包括将第一工件210和第二工件220进行贴合的步骤。例如,第一工件210朝向第二工件220的表面、或者第二工件220朝向第一工件210的表面在对位之前已设置有贴合胶(图未示),第一工件210和第二工件220对位成功后,使第一工件210和第二工件220靠近,并通过贴合胶贴合。
73.综上,本技术实施例的光学对位方法和光学对位装置,通过调整第一工件和第二工件的距离,使鬼影在出射光束的图像中消失,可避免鬼影对第一工件和第二工件是否对位成功的影响,提升第一工件和第二工件对位的准确度,避免第一工件和第二工件的贴合异常。以上实施方式仅用以说明本技术的技术方案而非限制,尽管参照以上较佳实施方式对本技术进行了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换都不应脱离本技术技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1