用于空间遥感相机的多维跨尺度通用装调装置及装调方法与流程
1.本发明涉及航天遥感技术领域,尤其涉及一种用于空间遥感相机的多维跨尺度通用装调装置及装调方法。
背景技术:
2.空间遥感相机是利用载装在航天器上的遥感器收集地物目标辐射或反射的电磁波,以获取并判定大气、陆地或海洋环境信息的技术。空间遥感相机的装调装置可将遥感器的反射镜组件、焦面组件、调焦机构及遮光罩等组部件高精度地安装于相机主承力结构上,从而实现空间遥感相机的结构组装。
3.考虑到空间遥感相机组件安装过程的可操作性,需要装调装置能够提供足够的装调空间。此外,在空间遥感相机的组装及测试过程中,还需要对相机进行旋转、翻转等姿态调整操作,故适用于空间遥感相机的通用装调装置需要能够实现多维空间姿态切换,且实现移动、起吊及固定等位置变化。
4.目前常用的空间相机装调装置属于专用型装调设备,其针对某种型号的空间遥感相机定制的装调设备,设备的灵活度较低,整个设备无法解决其他相机的装调问题,从而造成了资源的极大浪费。
5.因此,基于上述技术问题,本领域的技术人员亟需研发一种用于空间遥感相机的多维跨尺度通用装调装置及装调方法。
技术实现要素:
6.本发明的目的是提供一种基于通用性设计理念中对于产品应用的考虑应尽最大可能面向所有的使用对象的适用于现在和未来的跨尺度空间遥感相机通用装调装置,以提高装置的普遍实用性,增加设备的灵活性,使得资源得到了重复使用。
7.为了实现上述目的,本发明提供如下技术方案:
8.本发明的一种用于空间遥感相机的多维跨尺度通用装调装置,该装调装置包括:
9.安装立板;
10.与所述安装立板装配固定的固定底板,所述安装立板和所述固定底板之间安装有支撑件;
11.沿所述安装立板的周向布置的三组支腿导向装置,三组所述支腿导向装置与空间遥感相机连接以形成三点支撑结构;以及
12.安装于所述安装立板或所述固定底板的固定支撑组件,所述固定支撑组件用以调节整体的高度;
13.所述支腿导向装置具有能够沿所述支腿导向装置的延伸方向移动的柔性支撑件,跨尺度的所述空间遥感相机通过所述柔性支撑件与对应的所述支腿导向装置连接。
14.进一步的,所述安装立板和所述固定底板的连接处通过螺钉装配固定;
15.所述支撑件分为内支撑件和外支撑件;
16.所述内支撑件布置于所述安装立板和所述固定底板彼此靠近一端,且所述内支撑件两端分别与所述安装立板和所述固定立板固连以形成为三角形支撑结构;
17.所述外支撑件布置于所述安装立板和所述固定立板彼此远离一端,且所述外支撑件两端分别与所述安装立板和所述固定立板固连以形成为三角形支撑结构。
18.进一步的,所述支腿导向装置分为第一支腿导向装置、第二支腿导向装置和第三支腿导向装置;
19.所述支腿导向装置包括:
20.导向轨道,所述导向轨道沿其长度方向设置有滑道;
21.滑动连接于所述滑道内的滑块;以及
22.通过螺钉与所述滑块固连的所述柔性支撑件,所述柔性支撑件呈折弯状,所述柔性支撑件一侧与所述滑块连接,所述柔性支撑件另一侧与所述空间遥感相机的后框架组件的背部连接;
23.所述滑块的侧面具有限位器。
24.进一步的,所述柔性支撑件包括:
25.第一体,所述第一体与所述滑块连接;
26.第二体,所述第二体与所述空间遥感相机连接;以及
27.形成于所述第一体和所述第二体之间的过渡体;
28.所述过渡体上开设有两层u型柔性槽,两层所述u型柔性槽交错布置,且两层所述u型柔性槽的u型朝向相反。
29.进一步的,所述固定支撑组件包括:
30.与所述安装立板或所述固定底板通过螺钉装配固定的l型底座;
31.通过螺钉安装于所述l型底座远离所述安装立板或所述固定底板一端的垫圈,所述垫圈具有内螺纹孔;以及
32.穿过所述l型底座和所述垫圈的重型万向调节地脚,所述重型万向调节地脚的丝杠与所述垫圈螺纹连接。
33.进一步的,所述垫圈为铜基镶嵌自润滑材质。
34.进一步的,所述安装立板的边缘和/或所述固定底板的边缘处安装有起吊柱。
35.进一步的,所述安装底板或所述固定底板的底部安装有万向轮。
36.本发明还公开了一种空间遥感相机的多维跨尺度的装调方法,其特征在于,该装调方法基于如上所述的通用装调装置,且该装调方法主要包括以下步骤:
37.s1、将l型底座、垫圈和重型万向调节地脚提前装配以形成为固定支撑组件,将垫圈安装在l型底座并按照螺栓紧固力矩标准拧紧螺钉,随后将重型万向调节地脚旋入垫圈的内螺纹孔中;
38.s2、将支腿导向装置提前装配,将滑块移入导向轨道的滑道内,并安装相机尺寸确定滑块的位置,利用限位器固定滑块位置,最后将柔性支撑件安装在滑块上,并按照螺栓紧固力矩标准拧紧螺钉;
39.s3、将起吊柱和万向轮依次安装在安装立板和固定底板上,并按照螺栓紧固力矩标准拧紧螺钉;
40.s4、在安装立板上依次安装第一支腿导向装置、第二支腿导向装置和第三支腿导
向装置,并按照螺栓紧固力矩标准拧紧螺钉;
41.s5、按照空间遥感相机装配调试需求确定固定支撑组件的安装位置,并按照螺栓紧固力矩标准拧紧螺钉;
42.s6、将安装立板与固定底板连接,并按照螺栓紧固力矩标准拧紧螺钉;
43.s7、确定组合工装的空间位置,并将内支撑件和外支撑件分别安装于安装立板和固定底板之间,并按照螺栓紧固力矩标准拧紧螺钉,最终形成为三角形支撑结构;
44.s8、调整重型万向调节地脚丝杠高度至合适位置;
45.s9、将空间遥感相机的对应位置安装在第一支腿导向装置、第二支腿导向装置和第三支腿导向装置上,并按照螺栓紧固力矩标准拧紧螺钉。
46.在上述技术方案中,本发明提供的一种用于空间遥感相机的多维跨尺度通用装调装置及装调方法,具有以下有益效果:
47.本发明提供的一种适用于空间遥感相机通用装调装置,能够满足空间遥感相机在装调过程中空间姿态变化的要求,达到空间遥感相机的移动、起吊、固定等位置变化的目标。
48.本发明提供的一种适用于空间遥感相机通用装调装置,适用于长度范围在[0.25,1.2]m,宽度范围在[0.2,1.2]m,质量不超过500kg的空间遥感相机,实现了跨尺度空间遥感相机采用柔性装调装置的通用性设计。
[0049]
本发明提供的一种适用于空间遥感相机的多维跨尺度通用组合装置的装调方法,按照组合装置的装调步骤,能够实现空间相机的高精度安装、调试以及实验测试。
附图说明
[0050]
为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
[0051]
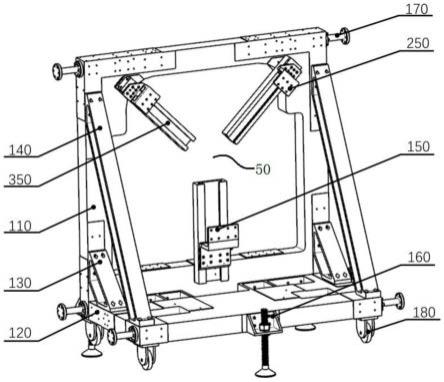
图1为本发明实施例提供的一种用于空间遥感相机的多维跨尺度通用装调装置的结构示意图;
[0052]
图2为本发明实施例提供的一种用于空间遥感相机的多维跨尺度通用装调装置的支腿导向装置的结构示意图;
[0053]
图3为本发明实施例提供的一种用于空间遥感相机的多维跨尺度通用装调装置的固定支撑组件的结构示意图;
[0054]
图4为本发明实施例提供的一种用于空间遥感相机的多维跨尺度通用装调装置的空间遥感相机安装时的状态图;
[0055]
图5为本发明实施例提供的一种用于空间遥感相机的多维跨尺度通用装调装置的空间遥感相机处于反向重力状态的结构示意图;
[0056]
图6为本发明实施例提供的一种用于空间遥感相机的多维跨尺度通用装调装置的空间遥感相机处于横向推扫状态的结构示意图;
[0057]
图7为本发明实施例提供的一种用于空间遥感相机的多维跨尺度通用装调装置的装调方法的流程框图。
[0058]
附图标记说明:
[0059]
110、安装立板;120、固定底板;130、内支撑件;140、外支撑件;
[0060]
50、支腿导向装置;
[0061]
150、第一支腿导向装置;250、第二支腿导向装置;350、第三支腿导向装置;
[0062]
160、固定支撑组件;170、起吊柱;180、万向轮;
[0063]
151、柔性支撑件;152、导向轨道;153、滑块;154、滑道;155、限位器;156、第一体;157、第二体;158、过渡体;159、u型柔性槽;
[0064]
161、l型底座;162、垫圈;163、重型万向调节地脚。
具体实施方式
[0065]
为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
[0066]
参见图1至图7所示;
[0067]
本实施例的一种用于空间遥感相机的多维跨尺度通用装调装置,该装调装置包括:
[0068]
安装立板110;
[0069]
与安装立板110装配固定的固定底板120,安装立板110和固定底板120之间安装有支撑件;
[0070]
沿安装立板110的周向布置的三组支腿导向装置50,三组支腿导向装置50与空间遥感相机连接以形成三点支撑结构;以及
[0071]
安装于安装立板110或固定底板120的固定支撑组件160,固定支撑组件160用以调节整体的高度;
[0072]
支腿导向装置50具有能够沿支腿导向装置50的延伸方向移动的柔性支撑件151,跨尺度的空间遥感相机通过柔性支撑件151与对应的支腿导向装置50连接。
[0073]
具体的,本实施例公开了一种能够满足空间遥感相机多维跨尺度装调的装置,其以装配固定的安装立板110和固定底板120为基础,在安装底板110上设计了能够满足空间遥感相机框架背部三个支撑点装配的三组支腿导向装置50,同时,为了能够调节装置高度,还设计了固定支撑组件160,通过支腿导向装置50和固定支撑组件160实现了空间遥感相机的多维跨尺度的装调。
[0074]
优选的,本实施例的安装立板110和固定底板120的连接处通过螺钉装配固定;
[0075]
支撑件分为内支撑件130和外支撑件140;
[0076]
内支撑件130布置于安装立板110和固定底板120彼此靠近一端,且内支撑件130两端分别与安装立板110和固定立板120固连以形成为三角形支撑结构;
[0077]
外支撑件140布置于安装立板110和固定立板120彼此远离一端,且外支撑件140两端分别与安装立板110和固定立板120固连以形成为三角形支撑结构。
[0078]
为了提高装置的稳定性,设计了内支撑件130和外支撑件140,内外支撑件均与安装立板110和固定底板120连接地形成为三角形支撑结构。
[0079]
作为本技术的拓展的实施方式:本实施例的支腿导向装置50分为第一支腿导向装置150、第二支腿导向装置250和第三支腿导向装置350;
[0080]
支腿导向装置50包括:
[0081]
导向轨道152,导向轨道152沿其长度方向设置有滑道154;
[0082]
滑动连接于滑道154内的滑块153.;以及
[0083]
通过螺钉与滑块153固连的柔性支撑件151,柔性支撑件151呈折弯状,柔性支撑件151一侧与滑块153连接,柔性支撑件151另一侧与空间遥感相机的后框架组件的背部连接;
[0084]
滑块153的侧面具有限位器155。
[0085]
通过滑块153实现柔性支撑件151与导向轨道152的滑动连接,并通过限位器155限位,能够保证滑块153在导向轨道152可控形成内高精度平顺地往复运动,并且带动柔性支撑件151移动到合适的位置以适配空间相机,进而实现跨尺寸空间相机高精度地安装在装调装置上。
[0086]
本实施例的柔性支撑件151包括:
[0087]
第一体156,第一体156与滑块153连接;
[0088]
第二体157,第二体157与空间遥感相机连接;以及
[0089]
形成于第一体156和第二体157之间的过渡体158;
[0090]
过渡体158上开设有两层u型柔性槽159,两层u型柔性槽159交错布置,且两层u型柔性槽159的u型朝向相反。
[0091]
柔性支撑件151通过上下反向的两层u型柔性槽159的变形可以释放安装面不平度所带来的装配应力。
[0092]
优选的,本实施例的固定支撑组件160包括:
[0093]
与安装立板110或固定底板120通过螺钉装配固定的l型底座161;
[0094]
通过螺钉安装于l型底座161远离安装立板110或固定底板120一端的垫圈162,垫圈162具有内螺纹孔;以及
[0095]
穿过l型底座161和垫圈162的重型万向调节地脚163,重型万向调节地脚163的丝杠与垫圈162螺纹连接。
[0096]
其中,上述的垫圈162为铜基镶嵌自润滑材质。
[0097]
本实施例的重型万向调节地脚163的位置可改变整体装调装置的高度,主要是通过丝杠的螺纹连接实现调节。
[0098]
优选的,本实施例的安装立板110的边缘和/或固定底板120的边缘处安装有起吊柱170。
[0099]
优选的,本实施例的安装底板110或固定底板120的底部安装有万向轮180。
[0100]
本实施例的装调装置可以实现空间遥感相机多种状态的装调,参见图1所示,图1为装调装置处于正向重力的状态;图4为装调装置处于相机安装的状态;图5为装调装置处于反向重力的状态;图6为装调工装处于推扫的状态。
[0101]
本发明还公开了一种空间遥感相机的多维跨尺度的装调方法,其特征在于,该装调方法基于如上所述的通用装调装置,且该装调方法主要包括以下步骤:
[0102]
s1、将l型底座161、垫圈162和重型万向调节地脚163提前装配以形成为固定支撑组件160,将垫圈162安装在l型底座161并按照螺栓紧固力矩标准拧紧螺钉,随后将重型万向调节地脚163旋入垫圈的内螺纹孔中;
[0103]
s2、将支腿导向装置50提前装配,将滑块153移入导向轨道152的滑道154内,并安装相机尺寸确定滑块153的位置,利用限位器155固定滑块153位置,最后将柔性支撑件151
安装在滑块153上,并按照螺栓紧固力矩标准拧紧螺钉;
[0104]
s3、将起吊柱170和万向轮180依次安装在安装立板110和固定底板120上,并按照螺栓紧固力矩标准拧紧螺钉;
[0105]
s4、在安装立板110上依次安装第一支腿导向装置150、第二支腿导向装置250和第三支腿导向装置350,并按照螺栓紧固力矩标准拧紧螺钉;
[0106]
s5、按照空间遥感相机装配调试需求确定固定支撑组件160的安装位置,并按照螺栓紧固力矩标准拧紧螺钉;
[0107]
s6、将安装立板110与固定底板120连接,并按照螺栓紧固力矩标准拧紧螺钉;
[0108]
s7、确定组合工装的空间位置,并将内支撑件130和外支撑件140分别安装于安装立板110和固定底板120之间,并按照螺栓紧固力矩标准拧紧螺钉,最终形成为三角形支撑结构;
[0109]
s8、调整重型万向调节地脚163丝杠高度至合适位置;
[0110]
s9、将空间遥感相机的对应位置安装在第一支腿导向装置150、第二支腿导向装置250和第三支腿导向装置350上,并按照螺栓紧固力矩标准拧紧螺钉。
[0111]
在上述技术方案中,本发明提供的一种用于空间遥感相机的多维跨尺度通用装调装置,具有以下有益效果:
[0112]
本发明提供的一种适用于空间遥感相机通用装调装置,能够满足空间遥感相机在装调过程中空间姿态变化的要求,达到空间遥感相机的移动、起吊、固定等位置变化的目标。
[0113]
本发明提供的一种适用于空间遥感相机通用装调装置,适用于长度范围在[0.25,1.2]m,宽度范围在[0.2,1.2]m,质量不超过500kg的空间遥感相机,实现了跨尺度空间遥感相机采用柔性装调装置的通用性设计。
[0114]
本发明提供的一种适用于空间遥感相机的多维跨尺度通用组合装置的装调方法,按照组合装置的装调步骤,能够实现空间相机的高精度安装、调试以及实验测试。
[0115]
以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1