全息光镊的一致性控制方法、装置、设备和存储介质
本发明涉及全息光镊,具体而言,涉及一种全息光镊的一致性控制方法、装置、设备和存储介质。
背景技术:
1、光镊技术是1986年ashkin发明的。其实现原理是,由于激光聚集可形成光阱,微小物体受光压而被束缚在光阱处,移动光束或者更新光束的位置使微小物体随光阱移动,借此可在显微镜下对微小物体(如病毒、细菌以及细胞内的细胞器及细胞组分等)进行的移位或手术操作。光镊技术已被广泛应用于从原子到数百微米级别的各种微观领域的研究。
2、传统的单光镊技术一次只能捕获和操控一个微粒,这限制了其应用范围和工作效率。而全息光镊技术可以产生任意排列分布的点光阱大阵列来同时捕获多个微粒,实现复杂的动态操控。
3、大部分在先技术的全息光镊的操作方法只停留在单细胞操纵中,且仍然依赖于人工操纵,不仅效率很低,而且还需要专业人员进行操纵,徒增人工成本。
4、部分在先技术通过对ccd相机采集到的微粒图像进行识别处理,采用a星算法求出单个微粒搬运路径,并采用比例积分控制器,控制两维电动位移平台移动载玻片来实现微粒的自动化搬运。其实质是单独的对各个细胞进行移动控制,不仅计算量大控制精度低,而且各个细胞在移动过程中不存在一致性,可能会互相干扰。
5、有鉴于此,申请人在研究了现有的技术后特提出本申请。
技术实现思路
1、本发明提供了一种全息光镊的一致性控制方法、装置、设备和存储介质,以改善上述技术问题中的至少一个。
2、第一方面、
3、本发明实施例提供了一种全息光镊的一致性控制方法,其包含:
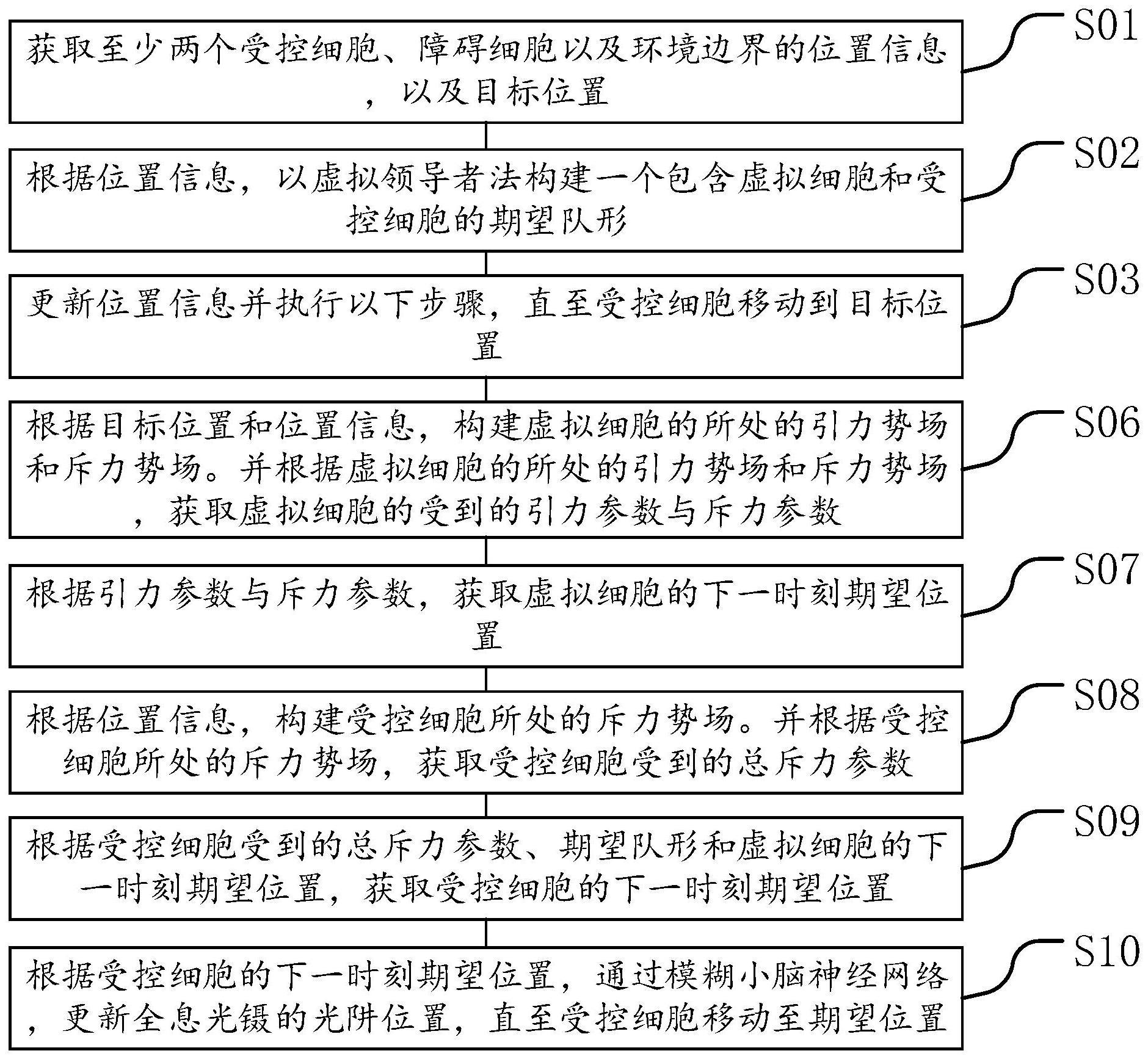
4、s01、获取至少两个受控细胞、障碍细胞以及环境边界的位置信息,以及目标位置。
5、s02、根据位置信息,以虚拟领导者法构建一个包含虚拟细胞和受控细胞的期望队形。其中,期望队形包含细胞间的期望相对距离。
6、s03、更新位置信息并执行以下步骤,直至受控细胞移动到目标位置。
7、s06、根据目标位置和位置信息,构建虚拟细胞所处的引力势场和斥力势场。并根据虚拟细胞所处的引力势场和斥力势场,获取虚拟细胞受到的引力参数与斥力参数。
8、s07、根据引力参数与斥力参数,获取虚拟细胞的下一时刻期望位置。
9、s08、根据位置信息,构建受控细胞所处的斥力势场。并根据受控细胞所处的斥力势场,获取受控细胞受到的总斥力参数。
10、s09、根据受控细胞受到的总斥力参数、期望队形和虚拟细胞的下一时刻期望位置,获取受控细胞的下一时刻期望位置。
11、s10、根据受控细胞的下一时刻期望位置,通过模糊小脑神经网络,更新全息光镊的光阱位置,直至受控细胞移动至期望位置。
12、第二方面、
13、本发明实施例提供了一种全息光镊的一致性控制装置,其包含:
14、初始信息获取模块,用于获取至少两个受控细胞、障碍细胞以及环境边界的位置信息,以及目标位置。
15、期望队形构建模块,用于根据位置信息,以虚拟领导者法构建一个包含虚拟细胞和受控细胞的期望队形。其中,期望队形包含细胞间的期望相对距离。
16、循环模块,用于更新位置信息并执行以下模块,直至受控细胞移动到目标位置。
17、虚拟细胞受力分析模块,用于根据目标位置和位置信息,构建虚拟细胞的所处的引力势场和斥力势场。并根据虚拟细胞的所处的引力势场和斥力势场,获取虚拟细胞的受到的引力参数与斥力参数。
18、虚拟细胞期望位置模块,用于根据引力参数与斥力参数,获取虚拟细胞的下一时刻期望位置。
19、受控细胞受力分析模块,用于根据受控细胞受到的总斥力参数、期望队形和虚拟细胞的下一时刻期望位置,获取受控细胞的下一时刻期望位置。
20、受控细胞期望位置模块,用于根据受控细胞受到的总斥力参数、期望队形和虚拟细胞的下一时刻期望位置,获取受控细胞的下一时刻期望位置。
21、控制模块,用于根据受控细胞的下一时刻期望位置,通过模糊小脑神经网络,更新全息光镊的光阱位置,直至受控细胞移动至期望位置。
22、第三方面、
23、本发明实施例提供了一种全息光镊的一致性控制设备,其包括处理器、存储器,以及存储在存储器内的计算机程序。计算机程序能够被处理器执行,以实现如第一方面任意一段所说的全息光镊的一致性控制方法。
24、第四方面、
25、本发明实施例提供了一种计算机可读存储介质,计算机可读存储介质包括存储的计算机程序,其中,在计算机程序运行时控制计算机可读存储介质所在设备执行如第一方面任意一段所说的全息光镊的一致性控制方法。
26、通过采用上述技术方案,本发明可以取得以下技术效果:
27、本发明实施例的一致性控制方法,能够以预设队形的结构同时操作多个细胞移动到目标点,且移动过程中能够自动避开障碍物,降低了全息光镊系统使用难度,降低了人工成本,提高了使用全息光镊系统对细胞进行各类研究时的效率。
技术特征:
1.一种全息光镊的一致性控制方法,其特征在于,包含:
2.根据权利要求1所述的全息光镊的一致性控制方法,其特征在于,根据所述位置信息,以虚拟领导者法构建一个包含虚拟细胞和受控细胞的期望队形;其中,所述期望队形包含细胞间的期望相对距离,具体包括:
3.根据权利要求1所述的全息光镊的一致性控制方法,其特征在于,根据所述目标位置和所述位置信息,构建虚拟细胞所处的引力势场和斥力势场,并根据所述虚拟细胞所处的引力势场和所述斥力势场,获取所述虚拟细胞受到的引力参数与斥力参数,之前还包括:
4.根据权利要求1所述的全息光镊的一致性控制方法,其特征在于,根据所述目标位置和所述位置信息,构建虚拟细胞所处的引力势场和斥力势场,并根据所述虚拟细胞所处的引力势场和所述斥力势场,获取所述虚拟细胞受到的引力参数与斥力参数,具体包括:
5.根据权利要求1所述的全息光镊的一致性控制方法,其特征在于,所述虚拟细胞的下一时刻期望位置的计算模型为:
6.根据权利要求1所述的全息光镊的一致性控制方法,其特征在于,根据所述位置信息,构建受控细胞所处的斥力势场;并根据所述受控细胞所处的斥力势场,获取所述受控细胞受到的总斥力参数,具体包括:
7.根据权利要求1至6任意一项所述的全息光镊的一致性控制方法,其特征在于,根据所述受控细胞的下一时刻期望位置,通过模糊小脑神经网络,更新全息光镊的光阱位置,直至受控细胞移动至期望位,具体包括:
8.一种全息光镊的一致性控制装置,其特征在于,包含:
9.一种全息光镊的一致性控制设备,其特征在于,包括处理器、存储器,以及存储在所述存储器内的计算机程序;所述计算机程序能够被所述处理器执行,以实现如权利要求1至7任意一项所述的全息光镊的一致性控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如权利要求1至7任意一项所述的全息光镊的一致性控制方法。
技术总结
全息光镊的一致性控制方法、装置、设备和存储介质,涉及全息光镊技术领域。一致性控制方法包含S1、获取受控细胞、障碍细胞和环境边界的位置信息,以及目标位置。S2、根据位置信息,构建包含虚拟细胞和受控细胞的期望队形。S3、更新位置信息并执行以下步骤,直至受控细胞移动到目标位置。S6、根据目标位置和位置信息,获取虚拟细胞的引力参数和斥力参数。S7、根据引力参数和斥力参数,获取虚拟细胞的下一时刻期望位置。S8、根据位置信息,获取受控细胞的总斥力参数。S9、根据总斥力参数、期望队形和虚拟细胞的下一时刻期望位置,获取受控细胞的下一时刻期望位置。S10、根据受控细胞的下一时刻期望位置,更新全息光镊的光阱位置。
技术研发人员:赵晶,侯辉
受保护的技术使用者:厦门理工学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!