偏振片旋转机构及3D结构光设备、双目散斑结构光设备的制作方法
偏振片旋转机构及3d结构光设备、双目散斑结构光设备
技术领域
1.本实用新型属于用于去除激光散斑噪声的光学成像设备,具体涉及一种偏振片旋转机构及3d结构光设备、双目散斑结构光设备。
背景技术:
2.主动3d设备(3d结构光设备和双目散斑结构光设备)一般是包含一或多个激光发射模组发射随机散斑点,然后利用一或多个相机接收模组接收其散斑点,通过计算被测场景与参考图(某一固定距离处的激光发射模组发射的随机散斑点信息)的散斑点的像素偏移,从而得到被测场景的深度信息。所以在相机接收模组中不能含有除激光发射模组发射之外的散斑信息。
3.然而随着城市化的发展,为了增加采光量,写字楼商场等一般都采用玻璃墙面,室内装修也多为采用一些亮面的装饰,如高亮瓷砖、高亮大理石、反射镜等,这样虽可以增加室内采光,但是这样的环境会造成各种各样的反射,而当主动3d设备(3d结构光设备和双目散斑结构光设备)的激光器发射激光散斑点时,环境中的亮面物体也会对激光散斑反射,这些反射的激光散斑点会对主动3d设备(3d结构光设备和双目散斑结构光设备)造成致命性的干扰,使得散斑匹配计算时有致命性的错误,从而产生许多不需要的深度噪声。
4.传统的主动3d设备(3d结构光设备和双目散斑结构光设备)主要为一发一收或者多发多收,但是这种方式,实际是怎样的场景那拍摄得到的也是怎样的场景,所以对于生活中被那些亮面反射的场景,会有大量反射散斑点干扰。
5.如图1所示,左图是激光发射模组的pattern图,右图是被测物经过环境亮面物体反射后增加了许多散斑镜像噪声,左图和右图中绿色框做相似度匹配计算时,因框中含有本不属于激光发射模组pattern中的散斑信息,会出现致命性的匹配深度计算错误。
技术实现要素:
6.有鉴于此,本实用新型的主要目的在于提供一种偏振片旋转机构及3d结构光设备、双目散斑结构光设备。
7.为达到上述目的,本实用新型的技术方案是这样实现的:
8.本实用新型实施例提供一种偏振片旋转机构,该机构包括底座、旋转固定座;
9.所述底座与旋转固定座活动连接,用于支撑旋转固定座;
10.所述旋转固定座上设置偏振片,用于带动偏振片沿x轴在0~360
°
内进行旋转。
11.上述方案中,所述旋转固定座的形状与偏振片的形状匹配。
12.上述方案中,所述旋转固定座的两端通过旋转轴与底座连接,所述旋转轴的一端与第一电机连接,用于在第一电机控制下旋转对应的角度。
13.本实用新型实施例还提供一种3d结构光设备,该设备包括第一激光散斑发射模组、第一相机接收模组、第一组装支架、如上述方案中任意一项所述的偏振片旋转机构;
14.所述第一激光散斑发射模组设置在第一组装支架的一侧,用于用于发射激光随机
散斑;
15.所述第一相机接收模组设置在第一组装支架的另一侧,用于接收第一激光散斑发射模组的随机散斑;
16.所述偏振片旋转机构设置在第一相机接收模组的接收随机散斑的方向上,用于消除随机散斑中的深度噪声;
17.所述第一组装支架用于承载第一激光散斑发射模组、第一相机接收模组。
18.上述方案中,所述第一激光散斑发射模组设置在第一组装支架的左侧或者右侧,所述第一相机接收模组设置在第一组装支架的右侧或者左侧。
19.上述方案中,所述第一组装支架设置在y轴旋转支架或者扫地机上,用于带动第一组装支架沿y轴在0~360
°
内进行旋转。
20.上述方案中,所述y轴旋转支架包括支腿、用于容纳第二电机的旋转底座,所述支腿设置在旋转底座的下方,所述旋转底座内的第二电机的输出端与第一组装支架底部的中心连接,用于带动其旋转。
21.上述方案中,该设备还包括述彩色接收模组、补光灯。
22.本实用新型实施例还提供一种双目散斑结构光设备,该设备包括第二激光散斑发射模组、第二相机接收模组、第二组装支架、如上述方案中任意一项所述的偏振片旋转机构;
23.所述第二激光散斑发射模组设置在第一组装支架的中间,用于用于发射激光随机散斑;
24.所述第二相机接收模组设置两个并且分别位于第一组装支架的左右两侧,用于接收第二激光散斑发射模组的随机散斑;
25.所述偏振片旋转机构设置在每个第二相机接收模组的接收随机散斑的方向上,用于消除随机散斑中的深度噪声;
26.所述第二组装支架用于承载第二激光散斑发射模组、第二相机接收模组。
27.上述方案中,所述第二组装支架设置在y轴旋转支架或者扫地机上,用于带动第二组装支架沿y轴在0~360
°
内进行旋转。
28.与现有技术相比,本实用新型能够去除不属于激光发射模组中的散斑信息。
附图说明
29.此处所说明的附图用来公开对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
30.图1为现有技术的散斑信息示意图;
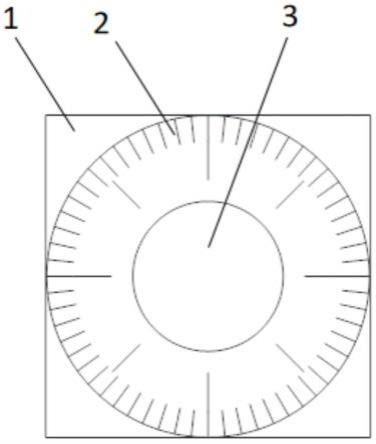
31.图2为本实用新型实施例1提供一种偏振片旋转机构的结构示意图;
32.图3为本实用新型的散斑图;
33.图4为本实用新型实施例2提供一种3d结构光设备的结构示意图;
34.图5为本实用新型实施例2提供一种3d结构光设备去除偏振片旋转机构的结构示意图;
35.图6为本实用新型实施例2提供一种3d结构光设备应用在扫地机的结构示意图;
36.图7为本实用新型实施例2提供一种3d结构光设备去除反射噪声的原理图;
37.图8为现有技术拍摄的被测物体场景的散斑图;
38.图9为本实用新型实施例2提供一种3d结构光设备拍摄的被测物体上的散斑图;
39.图10为本实用新型实施例2提供一种3d结构光设备应用在柜体的结构示意图;
40.图11为本实用新型实施例2提供一种3d结构光设备中偏振片旋转机构调整角度的原理图;
41.图12为本实用新型实施例3提供一种3d结构光设备的结构示意图;
42.图13为本实用新型实施例3提供一种3d结构光设备去除偏振片旋转机构的结构示意图。
具体实施方式
43.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
44.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
45.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、物品或者装置中还存在另外的相同要素。
46.本实用新型实施例1提供一种偏振片旋转机构,如图2所示,该机构包括底座1、旋转固定座2;
47.所述底座1与旋转固定座2活动连接,用于支撑旋转固定座;
48.所述旋转固定座2上设置偏振片3,用于带动偏振片3沿x轴在0~360
°
内进行旋转。
49.所述旋转固定座2的形状与偏振片3的形状匹配,例如可以采用圆形、方形、不规则形等。
50.在一些实施例中,所述旋转固定座2的两端通过旋转轴与底座1连接,所述旋转轴的一端与第一电机连接,用于在第一电机控制下旋转对应的角度。
51.如图3所示,通过旋转固定座2调整偏振片3的旋转角度,旋转角度也可根据实际使用场景调整,这样,s光被反射,p光被透过。
52.本实用新型实施例2提供一种3d结构光设备,如图4、5所示,该设备包括第一激光散斑发射模组4、第一相机接收模组5、第一组装支架6、偏振片旋转机构7;
53.所述第一激光散斑发射模组4设置在第一组装支架6的一侧,用于用于发射激光随机散斑;
54.所述第一相机接收模组5设置在第一组装支架6的另一侧,用于接收第一激光散斑发射模组4的随机散斑;
55.所述偏振片旋转机构7设置在第一相机接收模组5的接收随机散斑的方向上,用于消除随机散斑中的深度噪声;
56.所述第一组装支架6用于承载第一激光散斑发射模组4、第一相机接收模组5。
57.在一些实施例中,所述第一激光散斑发射模组4设置在第一组装支架6的左侧,所述第一相机接收模组5设置在第一组装支架6右侧。
58.在一些实施例中,所述第一激光散斑发射模组4设置在第一组装支架6的右侧,所述第一相机接收模组5设置在第一组装支架6左侧。
59.所述第一组装支架6设置在y轴旋转支架61或者扫地机上,用于带动第一组装支架6沿y轴在0~360
°
内进行旋转,调整整个设备的方向,以便对被测物体的探测。
60.在一些实施例中,如图6所示,由于扫地机本身具备360度旋转的功能,无需在额外设置沿y轴旋转的机构,直接依托扫地机带动第一组装支架6沿y轴在0~360
°
内进行旋转。
61.在一些实施例中,需要额外设置y轴旋转支架61,带动第一组装支架6沿y轴在0~360
°
内进行旋转。
62.如图7所示,所述y轴旋转支架61包括支腿611、用于容纳第二电机的旋转底座612,所述支腿611设置在旋转底座612的下方,所述旋转底座612内的第二电机的输出端与第一组装支架6底部的中心连接,用于带动其旋转。
63.在图7中,3d结构光设备的第一激光散斑发射模组4向被测物体63发射的激光随机散斑,其中被测物体的反射像62上呈现被测物体表面散斑点的反射像,如图8所示,存在大量深度噪声,在深度匹配计算时,会有致命性的噪声深度干扰,造成距离的误判,而本实用新型通过偏振片旋转机构7带动偏振片3沿x轴在0~360
°
内进行旋转,如图9所示,能够去除不属于激光发射模组中的散斑信息。
64.所述偏振片旋转机构7包括底座1、旋转固定座2;
65.所述底座1与旋转固定座2活动连接,用于支撑旋转固定座;
66.所述旋转固定座2上设置偏振片3,用于带动偏振片3沿x轴在0~360
°
内进行旋转。
67.所述旋转固定座2的形状与偏振片3的形状匹配,例如可以采用圆形、方形、不规则形等。
68.在一些实施例中,所述旋转固定座2的两端通过旋转轴与底座1连接,所述旋转轴的一端与第一电机连接,用于在第一电机控制下旋转对应的角度。
69.进一步地,该设备还包括述彩色接收模组、补光灯。
70.在一些实施例中,如图10所示,3d结构光设备设置在柜体上。
71.示例性地,如图11所示,n1为空气折射率,n2为激光散斑二次反射的物体折射率,根据可以得到3d结构光设备中偏振片旋转机构7的旋转角度θ=-θ1'
±
20。如一般的瓷砖地面,其3d结构光设备的旋转角度为:40
°
~70
°
。
72.本实用新型实施例3提供一种双目散斑结构光设备,如图12、13所示,该设备包括第二激光散斑发射模组8、第二相机接收模组9、第二组装支架10、偏振片旋转机构7;
73.所述第二激光散斑发射模组8设置在第一组装支架6的中间,用于用于发射激光随
机散斑;
74.所述第二相机接收模组9设置两个并且分别位于第一组装支架6的左右两侧,用于接收第二激光散斑发射模组8的随机散斑;
75.所述偏振片旋转机构7设置在每个第二相机接收模组9的接收随机散斑的方向上,用于消除随机散斑中的深度噪声;
76.所述第二组装支架10用于承载第二激光散斑发射模组8、第二相机接收模组9。
77.所述第二组装支架6设置在y轴旋转支架61或者扫地机上,用于带动第一组装支架6沿y轴在0~360
°
内进行旋转。
78.在一些实施例中,由于扫地机本身具备360度旋转的功能,无需在额外设置沿y轴旋转的机构,直接依托扫地机带动第一组装支架6沿y轴在0~360
°
内进行旋转。
79.在一些实施例中,需要额外设置y轴旋转支架61,带动第一组装支架6沿y轴在0~360
°
内进行旋转。
80.所述y轴旋转支架61包括支腿611、用于容纳第二电机的旋转底座612,所述支腿611设置在旋转底座612的下方,所述旋转底座612内的第二电机的输出端与第一组装支架6底部的中心连接,用于带动其旋转。
81.所述偏振片旋转机构7包括底座1、旋转固定座2;
82.所述底座1与旋转固定座2活动连接,用于支撑旋转固定座;
83.所述旋转固定座2上设置偏振片3,用于带动偏振片3沿x轴在0~360
°
内进行旋转。
84.所述旋转固定座2的形状与偏振片3的形状匹配,例如可以采用圆形、方形、不规则形等。
85.在一些实施例中,所述旋转固定座2的两端通过旋转轴与底座1连接,所述旋转轴的一端与第一电机连接,用于在第一电机控制下旋转对应的角度。
86.进一步地,该设备还包括述彩色接收模组、补光灯。
87.在一些实施例中,双目散斑结构光设备可以设置在柜体上。
88.所述偏振片旋转机构7包括底座1、旋转固定座2;
89.所述底座1与旋转固定座2活动连接,用于支撑旋转固定座;
90.所述旋转固定座2上设置偏振片3,用于带动偏振片3沿x轴在0~360
°
内进行旋转。
91.所述旋转固定座2的形状与偏振片3的形状匹配,例如可以采用圆形、方形、不规则形等。
92.在一些实施例中,所述旋转固定座2的两端通过旋转轴与底座1连接,所述旋转轴的一端与第一电机连接,用于在第一电机控制下旋转对应的角度。
93.本实用新型的3d结构光设备、双目散斑结构光设备也适用于安装有主动3d设备的刷脸柜机、扫地机器人、叉车、服务型机器人等。
94.以上所述,仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1