电磁电机系统、位置控制系统、载物台设备、光刻设备、确定电磁电机的电机相关变换模型的方法与流程
本发明涉及电磁电机以及电磁电机在光刻设备中的应用。具体地,本发明涉及确定电磁电机的电机相关变换模型,所述模型能够更准确地定位电机。
背景技术:
1、光刻设备是一种被构造为将期望图案施加到衬底上的机器。光刻设备可以用于例如集成电路(ic)的制造中。光刻设备可以例如将图案形成装置(例如,掩模)的图案(通常也称为“设计布局”或“设计”)投影到设置在衬底(例如,晶片)上的辐射敏感材料(抗蚀剂)的层上。
2、随着半导体制造过程的不断进步,电路元件的尺寸已经不断减小,而每个器件的功能元件(诸如晶体管)的量在几十年内一直在稳步增加,这遵循通常被称为“摩尔定律”的趋势。为了跟上摩尔定律,半导体行业正在追求能够创造越来越小的特征的技术。为了将图案投影到衬底上,光刻设备可以使用电磁辐射。该辐射的波长决定了可以在衬底上图案化的特征的最小尺寸。当前使用的典型波长是365nm(i线)、248nm、193nm和13.5nm。与使用例如波长为193nm的辐射的光刻设备相比,使用波长在4nm至20nm的范围内(例如,6.7nm或13.5nm)的极紫外(euv)辐射的光刻设备可以用于在衬底上形成更小的特征。
3、典型地,图案(例如,图案形成装置或掩模版上的图案)的投影过程涉及保持图案形成装置的支撑件和保持衬底的载物台的同步移动。这种支撑件通常配备有一个或多个电机或致动器,例如电磁电机,诸如线性电机或平面电机。为了确保实现图案或图案形成装置与衬底的期望相对位置,期望电机或致动器的高位置准确度。由于电机的部件的机械公差和物理性质的变化,需要对电机或致动器进行校准,以达到所期望的准确度。特别地,需要建立准确的电机模型来确定电机的合适控制信号,以达到期望的位置准确度。由于涉及许多变量或未知因素,已知的校准过程被发现是耗时的且繁琐的。
技术实现思路
1、与已知方法相比,期望以更有效的方式获得电磁电机的准确模型。
2、根据本发明的第一方面,提供了一种确定电磁电机的电机相关变换模型的方法,其中所述电磁电机包括第一构件和第二构件,所述第一构件包括线圈阵列,所述线圈阵列包括至少m个线圈,所述第二构件包括磁体阵列,所述磁体阵列被配置为产生空间交变磁场,
3、其中所述第一构件和所述第二构件被配置为通过向所述至少m个线圈供应相应的至少m个电流im而在n个自由度上相对于彼此移位,从而在n个自由度上产生力,n<m,所述方法包括以下步骤:
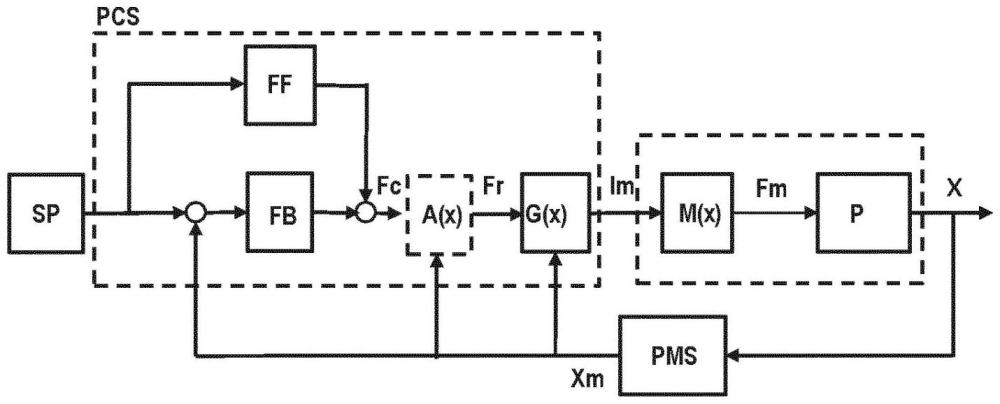
4、-获得所述电磁电机的变换模型g,通用的变换模型g提供n个自由度上的所期望的力fc与施加到所述线圈阵列的至少m个电流im之间的关系,即im=g*fc;
5、-定义nxn电机相关补偿矩阵a;
6、-通过以下方式执行预定位移来操作电磁电机:
7、o确定实现预定位移的所期望的力fc;
8、o通过im=g*fc确定线圈阵列的至少m个电流im;
9、o施加所述至少m个电流im以执行所述预定位移;
10、-确定在所述预定位移期间发生的在n个自由度上的实际力fm;
11、-基于fc=a*fm确定补偿矩阵a;
12、-获得电机相关变换模型为g*a。
13、根据本发明的第二方面,提供了一种电磁电机系统,所述电磁电机系统包括:
14、电磁电机,所述电磁电机包括第一构件和第二构件,
15、所述第一构件包括线圈阵列,所述线圈阵列包括至少m个线圈;
16、所述第二构件包括磁体阵列,所述磁体阵列被配置为产生空间交变磁场,
17、其中所述第一构件和所述第二构件被配置为通过向所述至少m个线圈供应相应的至少m个电流im而在n个自由度上相对于彼此移位,从而在n个自由度上产生力,n<m,
18、所述电磁电机系统还包括控制单元,所述控制单元被配置为产生用于控制所述电磁电机的控制信号,其中所述控制单元包括使用根据本发明的方法获得的电机相关变换模型。
19、根据本发明的第三方面,提供了一种电磁电机的位置控制系统,所述电磁电机包括第一构件和第二构件,
20、所述第一构件包括线圈阵列,所述线圈阵列包括至少m个线圈;
21、所述第二构件包括磁体阵列,所述磁体阵列被配置为产生空间交变磁场,
22、其中所述第一构件和所述第二构件被配置为通过向所述至少m个线圈供应相应的至少m个电流im而在n个自由度上相对于彼此移位,从而在n个自由度上产生力,n<m,所述位置控制系统包括控制单元,所述控制单元被配置为产生用于控制所述电磁电机的控制信号,其中所述控制单元包括使用根据本发明的方法获得的电机相关变换模型。
技术特征:
1.一种确定电磁电机的电机相关的变换模型的方法,其中所述电磁电机包括第一构件和第二构件,所述第一构件包括线圈阵列,所述线圈阵列包括至少m个线圈,所述第二构件包括磁体阵列,所述磁体阵列被配置为产生空间交变磁场,
2.根据权利要求1所述的方法,其中以实质上的恒定速度执行所述预定位移。
3.根据权利要求1或2所述的方法,其中执行所述预定位移包括:与正弦位置设定点结合应用线性位置设定点,所述线性位置设定点对应于以实质上的恒定速度的位移,所述正弦位置设定点以预定义的频率引起所述正弦力变化。
4.根据权利要求3所述的方法,其中所述正弦位置设定点的幅值使得所述电机的力高于预定义的阈值。
5.根据权利要求3或4所述的方法,其中所述线性位置设定点至少跨所述电机的多个磁节距。
6.根据前述权利要求中的任一项所述的方法,其中所述预定位移覆盖二维区域。
7.根据权利要求6所述的方法,其中所述二维区域覆盖所述电磁电机的操作范围。
8.根据前述权利要求中的任一项所述的方法,其中所述补偿矩阵a包括nxn个参数。
9.根据权利要求8所述的方法,其中所述nxn个参数取决于所述第一构件和所述第二构件之间的相对位置。
10.根据权利要求9所述的方法,其中所述第一构件和所述第二构件被配置为在x方向上相对于彼此移位,并且其中,所述参数中的至少一些参数包括x方向上的周期性函数。
11.根据权利要求10所述的方法,其中所述x方向上的周期性函数包括与所述磁体阵列的磁节距相关联的基谐波,其中所述x方向上的周期性函数还包括与所述磁体阵列的磁节距相关联的一个或多个高次谐波。
12.根据前述权利要求中的任一项所述的方法,其中所述预定位移包括以恒定速度的位移。
13.根据权利要求12所述的方法,其中所述预定位移还包括对恒定速度的位移叠加的正弦轮廓,其中所述电机相关补偿矩阵的至少一个非对角元素被设置为等于零。
14.一种电磁电机系统,包括:
15.根据权利要求14所述的电磁电机系统,其中所述线圈阵列包括沿第一方向布置的第一组线圈和沿第二方向布置的第二组线圈,所述第二方向实质上垂直于所述第一方向,并且其中,所述磁体阵列被配置为沿所述第一方向和所述第二方向产生所述空间交变磁场。
16.根据权利要求15所述的电磁电机系统,其中所述控制单元被配置为在n=6个自由度上控制所述第一构件相对于所述第二构件的位移,其中所述磁体包括永磁体。
17.根据权利要求14-16中的任一项所述的电磁电机系统,其中所述线圈阵列被布置在基部构件中,并且所述磁体阵列被布置在载物台构件上,所述载物台构件被配置为相对于所述基部构件移位。
18.根据权利要求14-17中的任一项所述的电磁电机系统,还包括功率转换器,所述功率转换器用于向所述电磁电机的所述第一构件的线圈阵列提供功率。
19.一种电磁电机的位置控制系统,所述电磁电机包括第一构件和第二构件,
20.一种用于光刻设备的载物台设备,所述载物台设备包括根据权利要求14-18中的任一项所述的电磁电机系统,其中所述载物台设备包括物体保持件,所述物体保持件被安装到所述第一构件或所述第二构件,其中所述物体保持件被配置为保持图案形成装置或衬底。
21.一种光刻设备,所述光刻设备包括根据权利要求20所述的载物台设备。
技术总结
本发明提供了一种确定电磁电机的电机相关变换模型的方法,其中该电磁电机包括第一构件和第二构件,第一构件包括线圈阵列,线圈阵列包括至少M个线圈,第二构件包括磁体阵列,磁体阵列被配置为产生空间交变磁场,其中第一构件和第二构件被配置为通过向至少M个线圈供应相应的至少M个电流Im而在N个自由度上相对于彼此移位,从而在N个自由度上产生力,N<M,方法包括以下步骤:获得电磁电机的变换模型G,通用的变换模型G提供N个自由度上的所期望的力Fc与施加到线圈阵列的至少M个电流Im之间的关系,即Im=G*Fc。
技术研发人员:汉斯·巴特勒
受保护的技术使用者:ASML荷兰有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!