一种图像曝光方法与流程
本发明属于激光直接成像领域,尤其涉及到一种图像曝光方法。
背景技术:
1、参考图1,激光直接成像设备包括:上水平导轨31、下水平导轨32、竖直梁33、控制模块35、左竖直导轨36、右竖直导轨37、位置检测装置38。在竖直梁33上,均布有若干激光器,例如,在竖直梁33上示例性的画出均匀分布的3颗激光器34-1、34-2和34-3。竖直梁33在控制模块35的控制下在上水平导轨31和下水平导轨32上左右往复运动,以带动若干激光器来回往复曝光;上水平导轨31、下水平导轨32以及竖直梁33在控制模块35的控制下作为整体在左竖直导轨36和右竖直导轨37上同时向下运动。位置检测装置38设置在下水平导轨32上,在位置检测装置38中,内置有读头39。
2、图1中,理论上,当3颗激光器34-1、34-2和34-3随同竖直梁33由初始位置o向右运动到下水平导轨32的a点处时,读头39立即感应到3颗激光器,控制模块35控制3颗激光器在a点出光,对感光涂层(未图示)进行曝光,控制模块35控制竖直梁33向右继续运动最右边的b点停止,控制模块35控制竖直梁33向下移动距离e(见图2),以使得3颗激光器整体向下移动距离e,控制模块35控制3颗激光器向左运动到水平导轨32的c点时,理论上,读头39立即感应到3颗激光器,控制模块35控制3颗激光器在c点出光,曝光完毕后,继续向左运动到初始位置o时停止。如此继续反复,直到曝光完所有的点,见图2所示。因此,理论上,若读头39不存在感应延迟,图2上的左列上的所有的曝光点(黑色圆点)应处于同一竖直线l1,右列上所有曝光点(黑色圆点)应处于同一竖直线l2上。需要说明的是,图2中上面10个曝光点是由1号激光器34-1按先从左到右,然后按从右到左多次往复逐行曝光得到的,下面10个曝光点为2号激光器34-2按先从左到右,然后按从右到左并多次多次往复逐行曝光得到的。
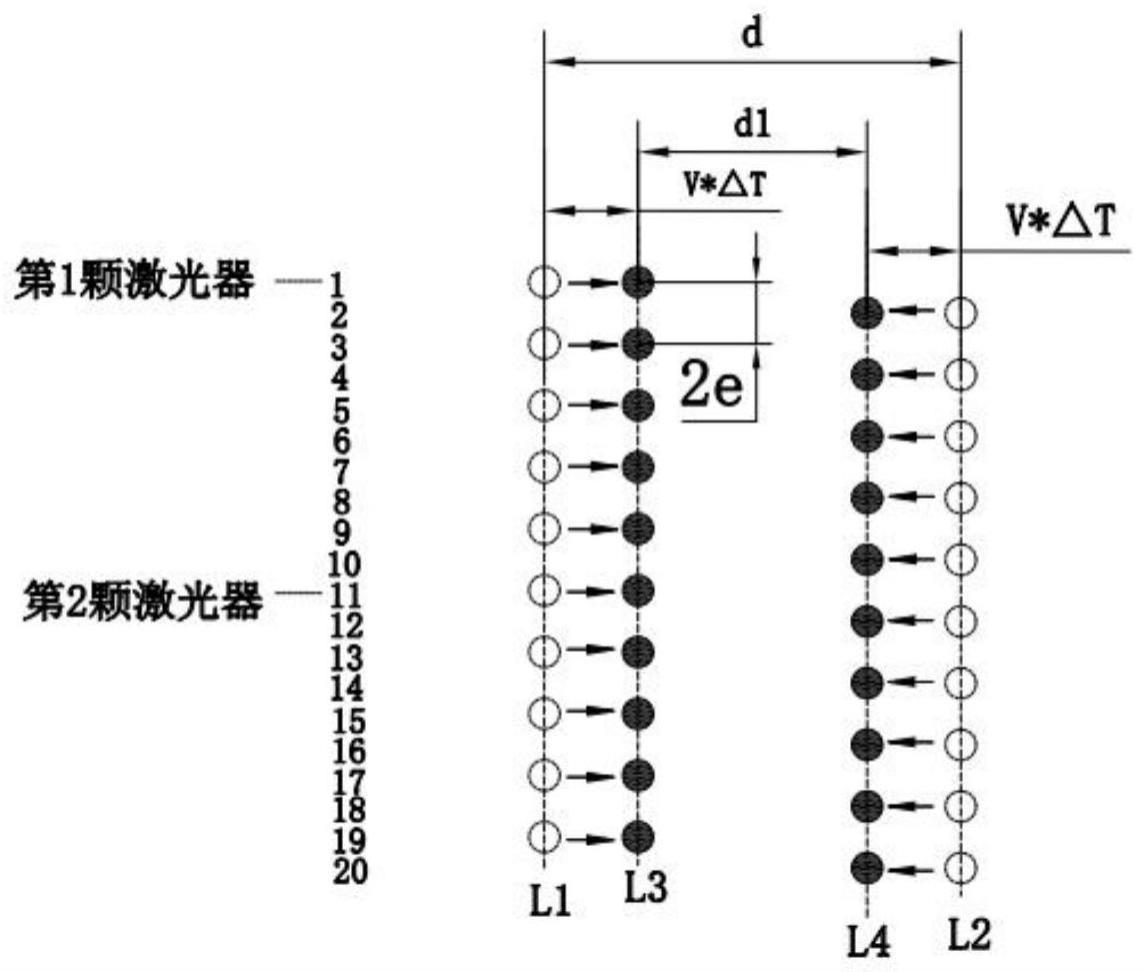
3、参考图3和图4,然而实际的情况是,由于读头39存在感应延迟,当1号激光器34-1达到第1行的虚线圆圈所示的预设位置l1(a点)时,读头39并未感应到1号激光器34-1,控制模块35控制1号激光器34-1不曝光,1号激光器34-1继续向右运动,经过时间△t后到达f点才被读头39感应到,此时控制模块35控制1号激光器34-1在f点曝光,曝光完毕后,1号激光器34-1继续运动到最右边位置b后停止。参考图1,控制模块35控制上水平导轨31、下水平导轨32在左竖直导轨36、右竖直导轨37向下移动一个像素点大小e的距离,以使得1号激光器34-1向下移动距离e,控制模块35控制1号激光器34-1由位置b向左运动,参考图3,本来应该在c点(l2处)曝光,但由于读头39感应延迟了时间△t,使得激光器34-1继续向左运动到g点(l4处)才被感应到,因此激光器34-1的实际曝光位置为在竖直线l4处。可以理解的是,1号激光器34-1的除第一个曝光点以外的其余所有奇数个曝光点和第一个曝光点在同一竖直线l3上,1号激光器34-1的除第二个曝光点以外的其余所有偶数曝光点和第二个曝光点在同一竖直线l4上,即:1号激光器34-1曝光的所有奇数个曝光点相对于预设曝光位置l1向右偏移了v*△t的位移,所有偶数个曝光点相对于预设曝光位置l2向左偏移了v*△t的位移,其中,v为竖直梁33水平运动的速度,也是每一颗激光器的水平运动速度。
4、参考图3,若第2颗激光器34-2开始曝光的第一行是偶数颗曝光点,例如从第10个曝光点开始曝光,由于和第一颗激光器是同步同方向运动,因此可以理解的是,第2颗激光器34-2的第一个实际曝光点的位置相对于预设位置l2向右偏移了v*△t的位移,处于竖直线l5的位置,第二个曝光点的实际位置相对于预设位置l1向左偏移了v*△t的位移,处于竖直线l6的位置,因此,最后得到的第2颗激光器34-2曝光的所有左边曝光点的连线相对于第1颗激光器34-1曝光的左边的所有奇数个曝光点的连线偏移了2*v*△t的位移,所有右边曝光点的连线相对于第1颗激光器34-1曝光的右边的所有偶数个曝光点的连线偏移了2*v*△t的位移,这使得同侧的所有曝光点的连线错位,不在同一竖直线上,导致了图像曝光错误。图像曝光错误的实物图见图5。若预先采用专利2022100924860中的图像平移方法,将曝光点对应的像素点一个个进行精确平移,最后依然不能得到如图2所示的那样所有奇数个曝光点在同一竖直线上、所有偶数个曝光点在另一同一竖直线的希望出现的曝光结果。
技术实现思路
1、本发明提供了一种图像曝光方法,其目的在于解决若干激光器在往复逐行曝光过程中因磁头读数延迟导致的左侧的曝光点不在同一竖直线上,右侧的曝光点不同在另一竖直线上,从而导致曝光错误的问题。
2、本发明的方案如下:
3、一种图像曝光方法,运用于激光直接成像领域,包括:
4、激光直接成像设备的控制模块控制呈一列直线分布的若干激光器自上而下水平往复运动,激光直接成像设备的读头感应激光器位置时存在感应延迟,依次曝光感光涂层,得到分布在左列的奇数个曝光点、右列的偶数个曝光点的两列图像;
5、其中,处于最上面的第一颗激光器曝光第一个曝光点,其余各激光器各自曝光的第一个曝光点设置为自第一个曝光点起算的奇数个曝光点。
6、在一些实施例中,当每一颗激光器由第一行的最左边位置向右运动曝光完对应的第一个曝光点后,控制模块控制每一颗激光器同时向下移动一个像素点的位移并往回运动,曝光完对应的第二个曝光点,然后经回到第二行的最左边的初始位置,往下继续移动一个像素点的位移,以和曝光各自的第一个曝光点及第二个曝光点相同的方法,在感光涂层上曝光完剩余的曝光点。
7、在一些实施例中,所有奇数个曝光点的实际曝光位置连线形成的第三竖直线与预设曝光位置连线形成的第一竖直线的水平距离间隔为v*△t,所有偶数个曝光点的实际曝光点连线形成的第四竖直线与预设曝光点连线形成的第二竖直线的水平距离间隔为v*△t;
8、其中,v为每一颗激光器的水平运动速度,△t为读头感应激光器的位置时的延迟时间。
9、在一些实施例中,每相邻两颗激光器在竖直方向上间隔的距离不一定相同。
10、在一些实施例中,在竖直方向上左列或者右列的每相邻两曝光点间隔的距离为2e,其中e为待曝光图像的分辨率。
11、在一些实施例中,激光直接成像设备还包括:竖直梁、平行放置的上导轨和下导轨、位置检测装置、竖直放置的左导轨和右导轨,竖直梁垂直设置在上导轨和下导轨之间且和左导轨和右导轨平行,位置检测装置设置在下导轨上,读头内置于位置检测装置中;
12、若干激光器呈一列设置在竖直梁上,控制模块控制竖直梁沿着上导轨和下导轨水平往复运动,以带动若干激光器在水平方向上来回运动;
13、控制模块控制上导轨和下导轨在左导轨和右导轨上同步向下运动,以带动竖直梁上的若干激光器整体向下运动。
14、在一些实施例中,控制模块为芯片处理器。
15、本发明的有益技术效果:将所有激光器的初始曝光点设置在奇数曝光点位置处,当每一颗激光器来回逐行曝光感光涂层时,处于左侧的所有奇数个曝光点位于同一竖直线上,处于右侧的所有偶数个曝光点位于另一竖直线上,解决了激光直接成像设备的磁头因为读数延迟、各激光器的起始曝光点不同在奇数个曝光点而造成的左侧的奇数个曝光点的连线不在同一竖直线上、右侧的偶数个曝光点的连线不在同一竖直线上,从而导致曝光错误的问题。
- 还没有人留言评论。精彩留言会获得点赞!