一种基于网络数字化的AOR自动跳纤机器人的制作方法
本申请涉及跳纤管理,特别涉及一种基于网络数字化的aor自动跳纤机器人。
背景技术:
1、20世纪90年代,在我国新兴的光纤开始取代传统的电缆,光纤通信系统的国家干线逐步形成,截至2022年底全国光缆线路总长度达到5958万公里,普通光缆的使用寿命在25-30年左右,我国现有光缆整体老化,运维压力增大,在这种情况下,大部分的光纤配线还依赖于人工到现场进行光纤调度的传统工作模式,进一步加剧了运维压力。
2、人工到现场进行光纤调度配线的方式,对于一些进站难,例如两站点距离远、无人值守、业务开通需打申请、继电保护业务同缆同路由等场景,会导致整个跳纤操作耗时长,效率低的问题,使运维加压无形加剧。
技术实现思路
1、本申请目的在于通过自动跳纤配线的方式代替人工到场跳纤配线,大幅度提高跳纤配线的效率,相比现有技术提供一种基于网络数字化的aor自动跳纤机器人,包括安装在光纤机箱内的机芯内箱、数字孪生模拟平台以及与二者信号连接的控制中心,机芯内箱内安装有机芯,机芯内箱上设置有视窗,视窗正对机芯,机芯包括通过电机纵向转动连接在机芯内箱内的转动轴以及横向安装在机芯内箱内的光纤盘,转动轴上安装有与光纤盘相互匹配的跳纤单元,光纤盘底部与机芯内箱内壁之间连接有支撑组件,支撑组件包括固定连接在机芯内箱左右内壁之间的两个横杆、固定连接在两个横杆之间的纵杆以及多个分别固定连接在横杆和光纤盘之间、纵杆和光纤盘之间的竖向支撑架,光纤盘包括外线环以及位于外线环内侧的内线环,外线环和内线环底部均与多个竖向支撑架固定连接,外线环和内线环上端均固定安装有多个呈环形阵列分布的光纤接口,光纤接口上对应插设有光纤。
2、通过数字孪生模拟平台可完全仿真光纤机箱内的光纤分布情况,可根据模拟出的图像信息远程控制跳纤,当需要插拔替换光纤时,先控制其移动至空闲的光纤处,并控制光纤夹具将其拔下,然后控制跳纤单元携带空间的光纤移动到需要被替换的光纤处,将其拔出并插在光纤交换台上,并将空闲的光纤插到目标位置上,完成跳纤,在此过程中,一方面,本机器人替换人工到场的方式,直接完成光纤的替换跳纤,进而大幅度缩短跳纤耗时,显著降低运维压力,另一方面,多个光纤呈环形阵列的有序分布,相较于现有技术中人工随机跳纤的杂乱分布,有效保证跳纤准确率,不易造成跳纤错误的情况发生。
3、进一步的,通过数字孪生模拟平台搭建完全仿真的光纤机箱内的结构,并对应的将多个光纤接口以及光纤通过颜色进行占用、空闲、损坏的标注,使通过仿真的图像信息,即可明确判断多个光纤的情况,有效避免在跳纤时,重复使用了已被占用或损坏的光纤,通过数字孪生模拟平台既可提高远程对机芯内箱内情况的控制,使后续运维时,无需人工到场也可实现自动配线跳纤,又可实现配线模拟,预测出最佳的走线路径,避免绕线的情况发生。
4、进一步的,跳纤单元包括固定连接在转动轴底部外端的同步转盘、固定连接在同步转盘上的径向板、两个分别固定连接在径向板上端的光纤夹具以及位于外线环和内线环之间的光纤交换台,光纤交换台通过电动滑轨连接在内线环和之间的间隙内,两个光纤夹具相互靠近的端部安装有颜色传感器和高清摄像头,通过颜色传感器和高清摄像头可识别不同的光纤接口和光纤,有效保证整个自动配线过程的准确性。
5、进一步的,两个光纤夹具分别位于外线环的外侧以及内线环的内侧,且两个光纤夹具的夹持端均朝向相互靠近的一侧,两个光纤夹具分别控制临近的外线环或内线环上的光纤的插拔。
6、进一步的,光纤交换台上端同样固定安装有两个光纤接口,光纤交换台以及两个光纤夹具的纵向中轴线位于同一平面上,在跳纤过程中,先将空闲的光纤拔出并插接到光纤交换台的光纤接口上,然后控制跳纤单元移动至需要被替换的光纤处,将目标位置上需要被替换的光纤拔出并插接在光纤交换台上另一个光纤接口内,然后将空闲光纤插接到目标位置,再将被替换的光纤放回至原先空闲光纤移走后空出的光纤接口处,完成跳纤。
7、进一步的,光纤接口与两个光纤夹具相对的两个端面上均开凿有限位槽,光纤外端固定连接有两个限位块,两个限位块分别与两个限位槽相互对应,限位块和限位槽可辅助限位,使跳纤时,光纤接口与光纤的连接更加稳定。
8、可选的,光纤接口包括接口端以及固定连接在接口端底部的安装端,限位槽开凿在接口端处,接口端和安装端上设有两个显位线排,显位线排的上端部延伸至限位槽内,在将光纤插入到光纤接口内时,限位块会对限位槽内的显位线排产生挤压力,使其下移,进而使其内的有色溶液部分转移,使透色片处逐渐产生多个向上移动的色线,当光纤插接到位后,透色片处的色线在视觉上贯穿透色片,此时光纤夹具上的颜色传感器捕捉到该信号后,说明插接稳定,可将该信号反馈给控制中心,控制中心再控制光纤夹具完成插线的操作。
9、进一步的,安装端位于接口端正下方的内部开凿有空腔,显位线排包括活动镶嵌在接口端内的顶针、位于空腔内的液囊以及多个均匀固定连接在液囊上端的上行预色条,接口端内开凿有显位槽,显位槽槽口处固定连接有透色片,上行预色条上端部固定贯穿安装端并延伸至显位槽内,且上行预色条与显位槽内顶端固定连接。
10、进一步的,顶针轻质实心的硬性材料制成,使在未受到挤压力时,其重力不足以使顶针发生较大的形变,使该种情况下,透色片处观察不到色线,进而有效保证色线对光纤是否插接稳定的指示更加准确,且顶针位于限位槽内底端上方的距离小于空腔上下内壁之间的距离,有效保证顶针能完全嵌入到安装端内,使其不易在限位槽内凸起,使其不易影响限位块与限位槽的匹配,多个上行预色条均与液囊相通,且液囊内饱和填充有有色溶液,且液囊与空腔内壁紧密接触,使在受到限位块挤压时,液囊内的有色溶液会直接进入到上行预色条内,使上行预色条内产生色线,上行预色条以及透色片均为透明结构。
11、进一步的,空腔内底部固定镶嵌有磁片,磁片位于顶针正下方,顶针底部固定镶嵌有铁片,在限位块完全卡入到限位槽内时,顶针完全进入到安装端内,此时其底部靠近磁片,此时磁片对其产生磁吸力,可对液囊起到一定的限制作用,使其恢复形变的力作用在顶针上的部分较小,进而有效保证光纤与光纤接口之间插接的稳定性,不易意外松动,铁片与磁片相互吸附,且二者之间的磁吸力小于铁片恢复形变的力。
12、相比于现有技术,本申请的优点在于:
13、通过数字孪生模拟平台可完全仿真光纤机箱内的光纤分布情况,实现远程控制跳纤,当需要插拔替换光纤时,先控制其移动至空闲的光纤处,并控制光纤夹具将其拔下,然后控制跳纤单元携带空间的光纤移动到需要被替换的光纤处,将其拔出并插在光纤交换台上,并将空闲的光纤插到目标位置上,完成跳纤,在此过程中,一方面,本机器人替换人工到场的方式,直接完成光纤的替换跳纤,进而大幅度缩短跳纤耗时,显著降低运维压力,另一方面,多个光纤呈环形阵列的有序分布,相较于现有技术中人工随机跳纤的杂乱分布,有效保证跳纤准确率,不易造成跳纤错误的情况发生。
技术特征:
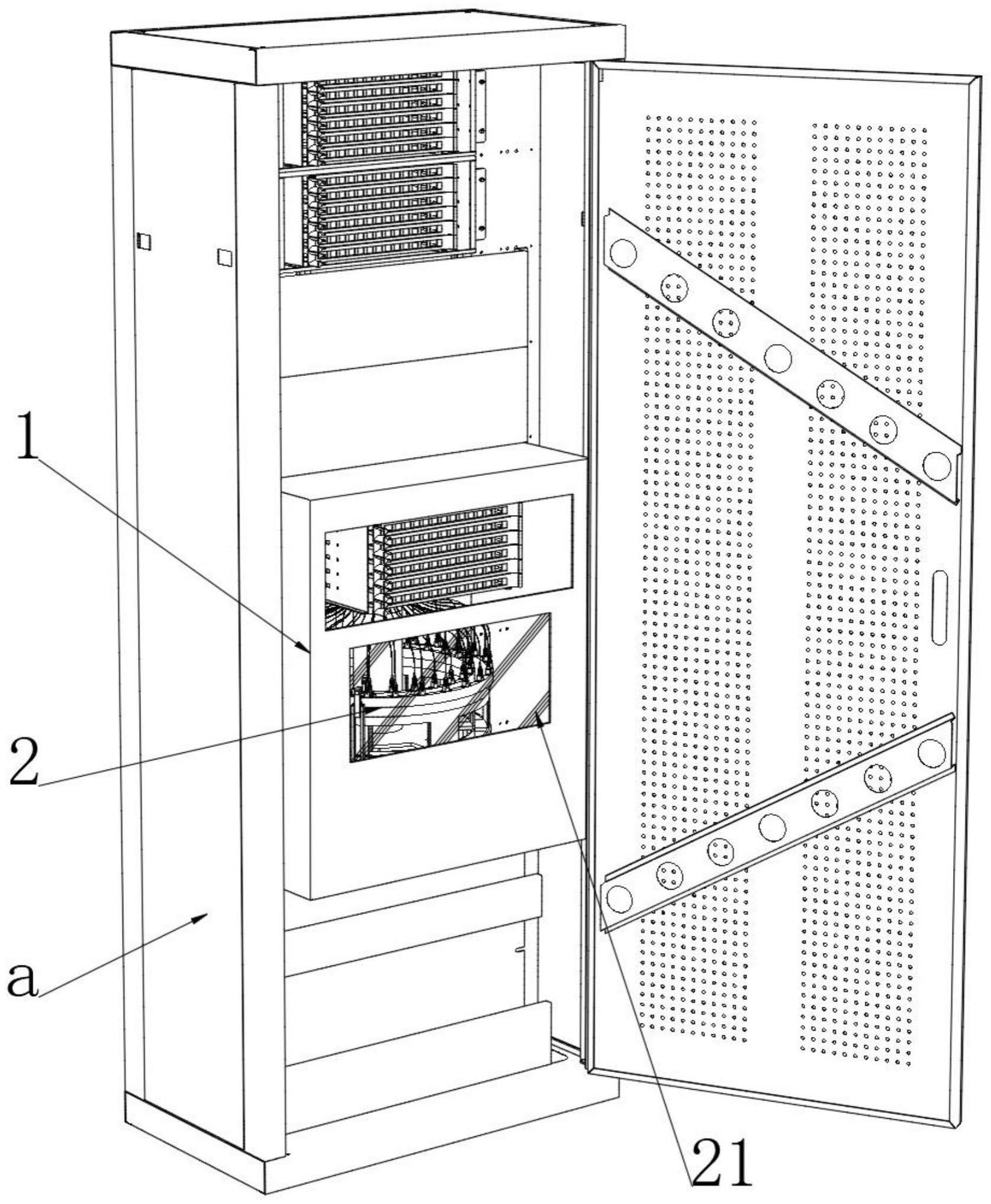
1.一种基于网络数字化的aor自动跳纤机器人,包括安装在光纤机箱内的机芯内箱(1)、数字孪生模拟平台以及与二者信号连接的控制中心,其特征在于,所述机芯内箱(1)内安装有机芯(2),所述机芯内箱(1)上设置有视窗(21),所述视窗(21)正对机芯(2),所述机芯(2)包括通过电机纵向转动连接在机芯内箱(1)内的转动轴(11)以及横向安装在机芯内箱(1)内的光纤盘,所述转动轴(11)上安装有与光纤盘相互匹配的跳纤单元,所述光纤盘底部与机芯内箱(1)内壁之间连接有支撑组件,所述支撑组件包括固定连接在机芯内箱(1)左右内壁之间的两个横杆(31)、固定连接在两个横杆(31)之间的纵杆(32)以及多个分别固定连接在横杆(31)和光纤盘之间、纵杆(32)和光纤盘之间的竖向支撑架(33),所述光纤盘包括外线环(41)以及位于外线环(41)内侧的内线环(42),所述外线环(41)和内线环(42)底部均与多个竖向支撑架(33)固定连接,所述外线环(41)和内线环(42)上端均固定安装有多个呈环形阵列分布的光纤接口(6),所述光纤接口(6)上对应插设有光纤(7)。
2.根据权利要求1所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,通过所述数字孪生模拟平台搭建完全仿真的光纤机箱内的结构,并对应的将多个光纤接口(6)以及光纤(7)通过颜色进行占用、空闲、损坏的标注。
3.根据权利要求1所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,所述跳纤单元包括固定连接在转动轴(11)底部外端的同步转盘(91)、固定连接在同步转盘(91)上的径向板(92)、两个分别固定连接在径向板(92)上端的光纤夹具(51)以及位于外线环(41)和内线环(42)之间的光纤交换台(52),所述光纤交换台(52)通过电动滑轨连接在内线环(42)和(43)之间的间隙内,两个所述光纤夹具(51)相互靠近的端部安装有颜色传感器和高清摄像头。
4.根据权利要求3所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,两个所述光纤夹具(51)分别位于外线环(41)的外侧以及内线环(42)的内侧,且两个光纤夹具(51)的夹持端均朝向相互靠近的一侧。
5.根据权利要求4所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,所述光纤交换台(52)上端同样固定安装有两个光纤接口(6),所述光纤交换台(52)以及两个光纤夹具(51)的纵向中轴线位于同一平面上。
6.根据权利要求5所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,所述光纤接口(6)与两个光纤夹具(51)相对的两个端面上均开凿有限位槽(63),所述光纤(7)外端固定连接有两个限位块(71),两个所述限位块(71)分别与两个限位槽(63)相互对应。
7.根据权利要求6所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,所述光纤接口(6)包括接口端(61)以及固定连接在接口端(61)底部的安装端(62),所述限位槽(63)开凿在接口端(61)处,所述接口端(61)和安装端(62)上设有两个显位线排,所述显位线排的上端部延伸至限位槽(63)内。
8.根据权利要求7所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,所述安装端(62)位于接口端(61)正下方的内部开凿有空腔,所述显位线排包括活动镶嵌在接口端(61)内的顶针(81)、位于空腔内的液囊(82)以及多个均匀固定连接在液囊(82)上端的上行预色条(83),所述接口端(61)内开凿有显位槽,所述显位槽槽口处固定连接有透色片(10),所述上行预色条(83)上端部固定贯穿安装端(62)并延伸至显位槽内,且上行预色条(83)与显位槽内顶端固定连接。
9.根据权利要求8所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,所述顶针(81)轻质实心的硬性材料制成,且顶针(81)位于限位槽(63)内底端上方的距离小于空腔上下内壁之间的距离,多个所述上行预色条(83)均与液囊(82)相通,且液囊(82)内饱和填充有有色溶液,且液囊(82)与空腔内壁紧密接触,所述上行预色条(83)以及透色片(10)均为透明结构。
10.根据权利要求9所述的一种基于网络数字化的aor自动跳纤机器人,其特征在于,所述空腔内底部固定镶嵌有磁片,所述磁片位于顶针(81)正下方,所述顶针(81)底部固定镶嵌有铁片(12)。
技术总结
本发明提供了应用于跳纤管理技术领域的一种基于网络数字化的AOR自动跳纤机器人,通过数字孪生模拟平台可完全仿真光纤机箱内的光纤分布情况,实现远程控制跳纤,当需要插拔替换光纤时,先控制其移动至空闲的光纤处,并控制光纤夹具将其拔下,然后控制跳纤单元携带空间的光纤移动到需要被替换的光纤处,将其拔出并插在光纤交换台上,并将空闲的光纤插到目标位置上,完成跳纤,在此过程中,一方面,本机器人替换人工到场的方式,直接完成光纤的替换跳纤,进而大幅度缩短跳纤耗时,显著降低运维压力,另一方面,多个光纤呈环形阵列的有序分布,相较于现有技术中人工随机跳纤的杂乱分布,有效保证跳纤准确率,不易造成跳纤错误的情况发生。
技术研发人员:杨贤,黄亦城,侯立奇,王储
受保护的技术使用者:江苏泽宇智能电力股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!