一种视觉辅助方法及AR眼镜与流程
本发明涉及视觉辅助,尤其涉及一种视觉辅助方法及ar眼镜。
背景技术:
1、目前,存在一些视障人士,他们对颜色的辨认能力比较弱或不能将几中颜色进行区分,或者眼睛有视网膜病变,或者因为感光细胞死亡导致看不清物体、颜色的细节,或者是立体感知能力、深度识别能力差,甚至是没有立体感知能力,往往体现在视力低下、看不清物体、分辨不出物体轮廓。通常这些症状都存在对比敏感度能力差的问题。
2、现有的视觉辅助方法,通过相机拍摄图片进行检测,从而对图片中物体进行标记,再传回人眼可视屏中,以实现视觉辅助,但现有的视觉辅助方法,并未对图片中各个物体的位置信息进行标记,部分用户无法感知物体远近,导致视觉辅助效果不佳。
技术实现思路
1、本发明提供了一种视觉辅助方法及ar眼镜,以解决现有视觉辅助方法并未对物体位置信息进行标记,无法为空间感知弱的用户提供视觉辅助的技术问题。
2、为了解决上述技术问题,本发明实施例提供了一种视觉辅助方法,包括:
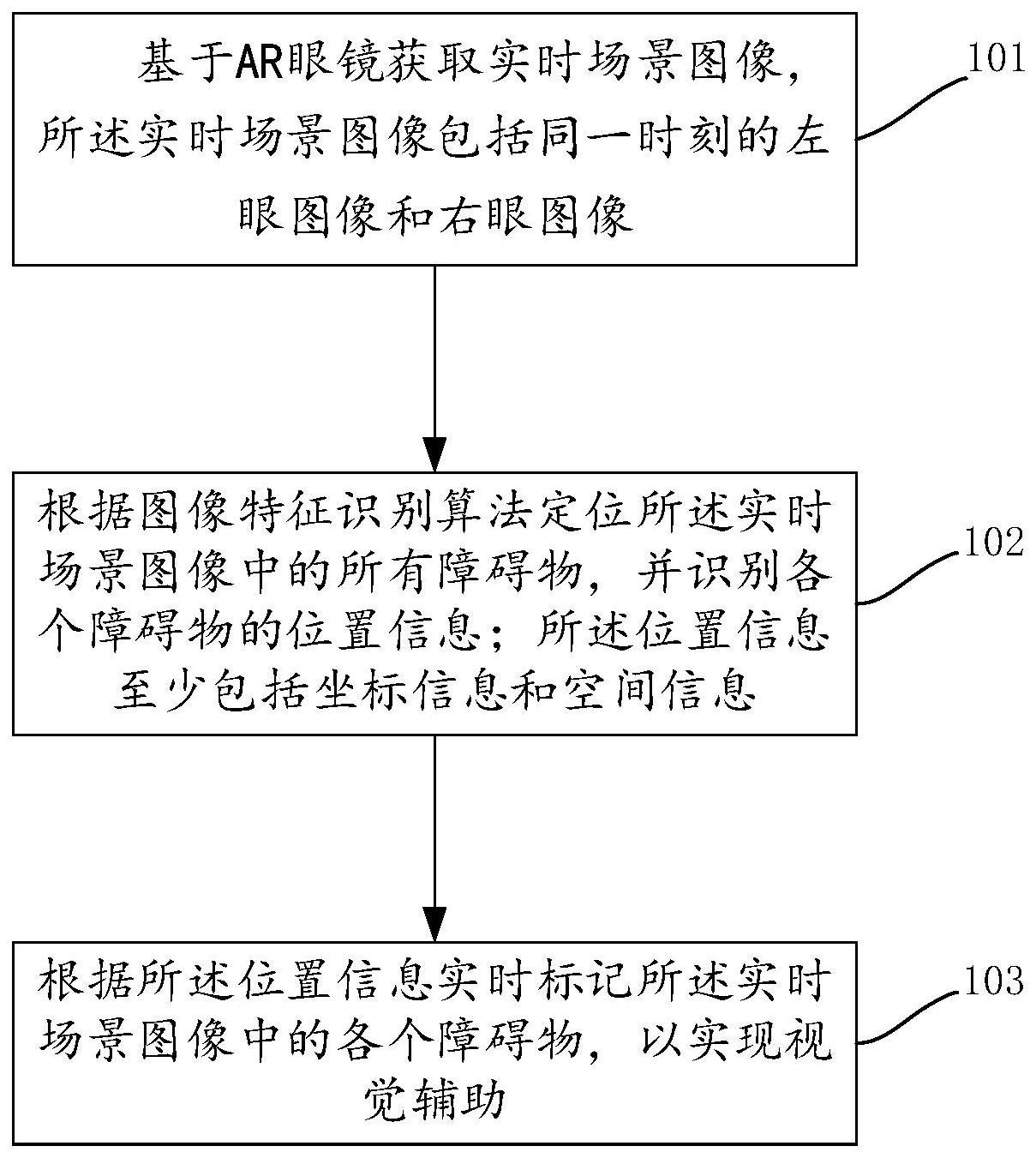
3、基于ar眼镜获取实时场景图像,所述实时场景图像包括同一时刻的左眼图像和右眼图像;
4、根据图像特征识别算法定位所述实时场景图像中的所有障碍物,并识别各个障碍物的位置信息;所述位置信息至少包括坐标信息和空间信息;
5、根据所述位置信息实时标记所述实时场景图像中的各个障碍物,以实现视觉辅助。
6、本发明通过ar眼镜实时获取实时场景中同一时刻的左眼图像和右眼图像,并根据图像特征识别算法,从而识别各个障碍物的位置信息,以对实时场景中的各个障碍物进行快速标记,并根据左眼图像和右眼图像的视差获取障碍物的位置信息,从而为用户提供实时场景中各个障碍物的空间信息和坐标信息。同时,由于基于ar眼镜设备对图像进行实时获取和处理,用户可实时佩戴所述ar眼镜进行日常活动,且在佩戴所真正实现实时视觉辅助。
7、进一步的,所述根据图像特征识别算法定位所述实时场景图像中的所有障碍物,具体为:
8、根据图像特征识别算法对所述左眼图像和所述右眼图像进行特征点提取;
9、根据所述左眼图像和所述右眼图像中的所有特征点定位所述左眼图像和所述右眼图像中的所有障碍物。
10、本发明通过图像特征识别算法对左眼图像和右眼图像进行特征点提取,从而快速定位同一时刻中左眼图像和右眼图像中的所有障碍物,避免图像处理时间过长导致视觉辅助滞后。
11、进一步的,所述识别各个障碍物的位置信息,具体为:
12、根据所述左眼图像和所述右眼图像的视差图,识别现实场景中各个障碍物的位置信息。
13、进一步的,所述根据所述左眼图像和所述右眼图像的视差图,识别现实场景中各个障碍物的位置信息,具体为:
14、将所述左眼图像和右眼图像映射到同一坐标平面中,比对所述左眼图像和右眼图像的横坐标,生成视差图;
15、根据所述视差图获取所述左眼图像和所述右眼图像中各个障碍物的水平差值;
16、根据所述水平差值和第一深度算法计算各个障碍物的位置信息。
17、本发明通过左眼图像和右眼图像的水平视差,识别实施场景中各个障碍物的位置信息,避免仅对单一平面图像进行处理,无法有效识别障碍物的空间远近信息。
18、进一步的,所述根据所述位置信息实时标记所述实时场景图像中的各个障碍物,具体为:
19、根据所述位置信息获取各个障碍物与用户之间的距离值;
20、根据所述各个障碍物与用户之间的距离值的大小,分类标记所述实时场景图像中的各个障碍物。
21、本发明通过根据障碍物与用户的远近对各个障碍物进行分类标记,通过不同标记方式,提高视觉辅助效果。
22、第二方面,本发明提供了一种ar眼镜,包括:图像获取模块、图像处理模块和标记模块;
23、所述图像获取模块,用于获取实时场景图像,所述实时场景图像包括同一时刻的左眼图像和右眼图像;
24、所述图像处理模块,用于所述根据图像特征识别算法定位所述实时场景图像中的所有障碍物,并识别各个障碍物的位置信息;所述位置信息至少包括坐标信息和空间信息;
25、所述标记模块,用于根据所述位置信息实时标记所述实时场景图像中的各个障碍物,以实现视觉辅助。
26、进一步的,所述图像处理模块,具体用于:
27、根据图像特征识别算法对所述左眼图像和所述右眼图像进行特征点提取;
28、根据所述左眼图像和所述右眼图像中的所有特征点定位所述左眼图像和所述右眼图像中的所有障碍物。
29、进一步的,所述图像处理模块,还用于:
30、根据所述左眼图像和所述右眼图像的视差图,识别现实场景中各个障碍物的位置信息。
31、进一步的,所述图像处理模块,还用于:
32、将所述左眼图像和右眼图像映射到同一坐标平面中,比对所述左眼图像和右眼图像的横坐标,生成视差图;
33、根据所述视差图获取所述左眼图像和所述右眼图像中各个障碍物的水平差值;
34、根据所述水平差值和第一深度算法计算各个障碍物的位置信息。
35、进一步的,所述标记模块,具体用于:
36、根据所述位置信息获取各个障碍物与用户之间的距离值;
37、根据所述各个障碍物与用户之间的距离值的大小,分类标记所述实时场景图像中的各个障碍物。
技术特征:
1.一种视觉辅助方法,其特征在于,包括:
2.如权利要求1所述的视觉辅助方法,其特征在于,所述根据图像特征识别算法定位所述实时场景图像中的所有障碍物,具体为:
3.如权利要求2所述的视觉辅助方法,其特征在于,所述识别各个障碍物的位置信息,具体为:
4.如权利要求3所述的视觉辅助方法,其特征在于,所述根据所述左眼图像和所述右眼图像的视差图,识别现实场景中各个障碍物的位置信息,具体为:
5.如权利要求1所述的视觉辅助方法,其特征在于,所述根据所述位置信息实时标记所述实时场景图像中的各个障碍物,具体为:
6.一种ar眼镜,其特征在于,包括:图像获取模块、图像处理模块和标记模块;
7.如权利要求6所述的ar眼镜,其特征在于,所述图像处理模块,具体用于:
8.如权利要求7所述的ar眼镜,其特征在于,所述图像处理模块,还用于:
9.如权利要求8所述的ar眼镜,其特征在于,所述图像处理模块,还用于:
10.如权利要求6所述的ar眼镜,其特征在于,所述标记模块,具体用于:
技术总结
本发明公开了一种视觉辅助方法及AR眼镜,包括:基于AR眼镜获取实时场景图像,所述实时场景图像包括同一时刻的左眼图像和右眼图像;根据图像特征识别算法定位所述实时场景图像中的所有障碍物,并识别各个障碍物的位置信息;所述位置信息至少包括坐标信息和空间信息;根据所述位置信息实时标记所述实时场景图像中的各个障碍物,以实现视觉辅助。通过AR眼镜实时获取实时场景中同一时刻的左眼图像和右眼图像,并根据图像特征识别算法,从而识别各个障碍物的位置信息,以对实时场景中的各个障碍物进行快速标记,并根据左眼图像和右眼图像的视差获取障碍物的位置信息,从而为用户提供实时场景中各个障碍物的空间信息和坐标信息。
技术研发人员:唐建文
受保护的技术使用者:广州视景医疗软件有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!