用于辅助驾驶的设备及辅助驾驶方法与流程
本发明涉及车辆控制,尤其涉及一种用于辅助驾驶的设备及辅助驾驶方法。
背景技术:
1、近些年来,随着增强现实(ar,augmented reality)技术的发展,ar技术也越来越多得为汽车行业得智能化提供便利,特别是ar技术在辅助驾驶领域的应用受到人们的关注。
2、现有技术中的辅助驾驶方法包括:泊车辅助、盲点检测等等。但是,发明人发现,现有技术中的辅助驾驶方法往往会转移驾驶员视线,降低驾驶员行车的安全性。
技术实现思路
1、本发明提供一种用于辅助驾驶的设备及辅助驾驶方法,以解决现有技术中存在的辅助驾驶方法往往会转移驾驶员视线,降低驾驶员行车的安全性的问题。
2、第一方面,本发明提供一种辅助驾驶的设备,包括:
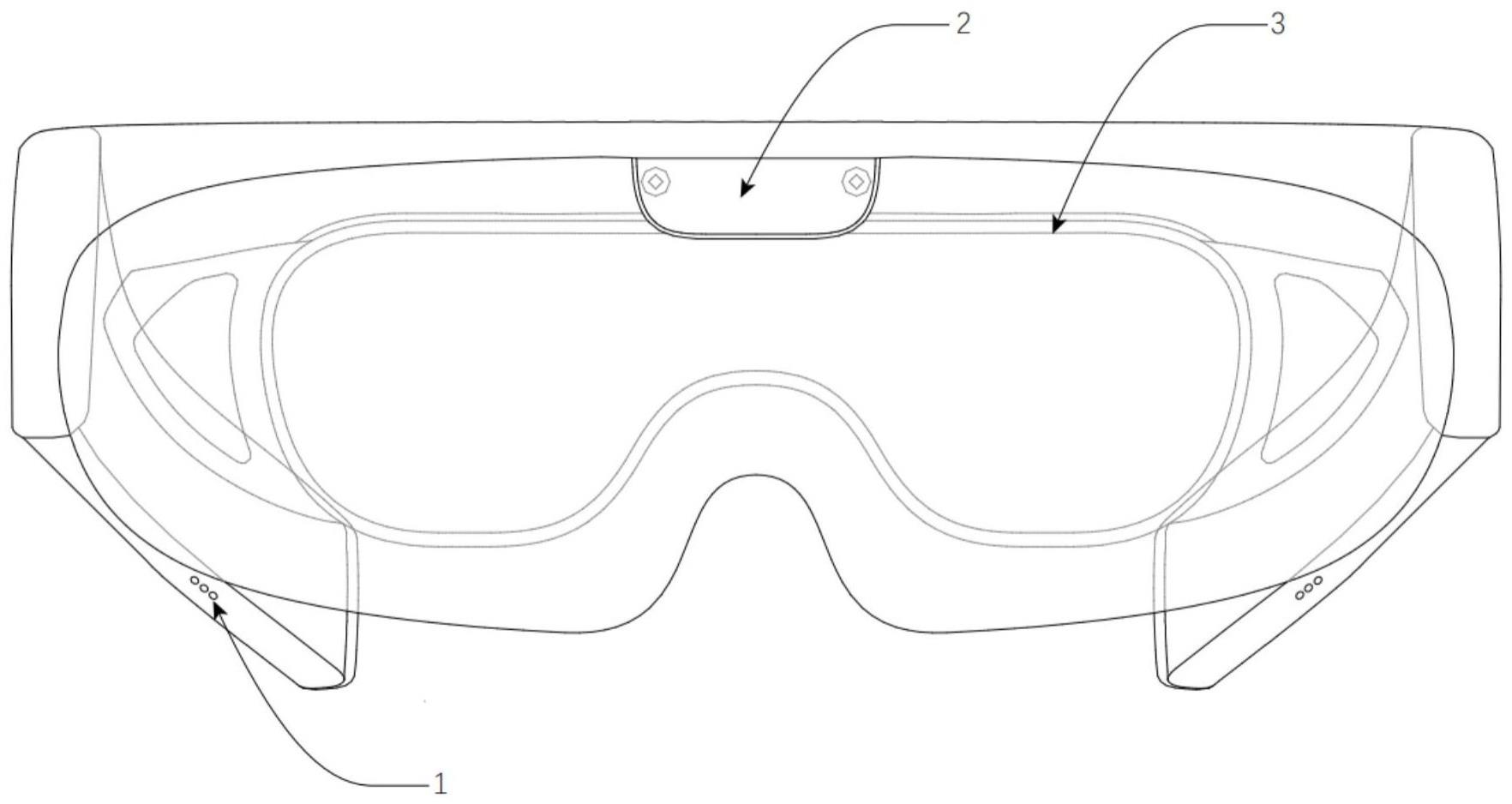
3、增强现实ar装置和设置在车辆上的全景影像系统;其中,ar装置包括:设备支架,以及设置在所述设备支架上的感应装置和光波导成像光学模组;
4、所述全景影像系统用于拍摄车辆四周的全景实时景象并生成第一预设格式的图像,将所述第一预设格式的图像传输至车机,以使所述车机通过无线通信连接将所述第一预设格式的图像传输至所述ar装置;
5、所述感应装置用于在设定的距离范围内检测到目标车辆时,与所述目标车辆的车机建立无线通信连接;
6、所述光波导成像光学模组用于显示所述第一预设格式的图像至用户眼睛处。
7、在一种可能的设计中,所述辅助驾驶的设备还包括:设置在所述车辆上的毫米波雷达和摄像头,以及设置在所述设备支架上的震动传感器;所述毫米波雷达用于实时检测所述车辆所在道路上的静态物体和/或动态物体,若检测到所述静态物体和/或动态物体靠近所述车辆的距离小于预设距离,则将检测到的信号传输至控制器,以使控制器发出信号至所述摄像头;所述摄像头用于当接收到所述控制器发出的信号时,拍摄所述车辆的左侧和/或右侧和/或尾侧的实时景象并生成第二预设格式的图像,并将所述第二预设格式的图像传输至车机,以使所述车机通过无线通信连接将所述第二预设格式的图像传输至所述ar装置;所述光波导成像光学模组还用于显示所述第二预设格式的图像至用户眼睛处;所述震动传感器用于当接收到所述控制器发出的信号时开启震动预警。
8、在一种可能的设计中,所述辅助驾驶的设备还包括:设置在车辆上的第一超宽带uwb锚点、中控解算单元和第一全球定位系统gps接收器;以及设置在所述设备支架上的第二gps接收器、第二uwb锚点和处理器;所述第一uwb锚点用于,若ar装置检测到第一uwb锚点信号,则测定所述ar装置与所述车辆之间的距离,得到所述车辆的uwb定位信息;所述中控解算单元用于将所述uwb定位信息发送给车机,以使车机通过无线通信的方式将所述车辆的uwb定位信息传输至所述ar装置;所述第二uwb锚点用于,若ar装置检测到第一uwb锚点信号,则测定所述车辆与所述ar装置之间的距离,得到所述ar装置的uwb定位信息;所述第一gps接收器用于,若ar装置检测不到第一uwb锚点信号,则测定所述车辆的gps定位信息,将所述车辆的gps定位信息发送给车机,以使车机通过无线通信的方式将所述车辆的gps定位信息传输至所述ar装置;所述第二gps接收器用于测定所述ar装置的gps定位信息;所述处理器用于将所述车辆的uwb定位信息、所述ar装置的uwb定位信息、所述车辆的gps定位信息和所述ar装置的gps定位信息转化为图像;所述光波导成像光学模组还用于显示所述图像至用户眼睛处。
9、在一种可能的设计中,所述设备支架为镜架;所述全景影像系统包括:前侧摄像头、第一边侧摄像头、第二边侧摄像头和后侧摄像头,分别设置在所述车辆的前侧、左侧、右侧和尾侧。
10、第二方面,本发明提供一种辅助驾驶方法,所述方法应用于如第一方面所述的用于辅助驾驶的设备,包括:
11、拍摄所述车辆四周的全景实时景象并生成第一预设格式的图像;
12、显示所述第一预设格式的图像至用户眼睛处,以使用户查看所述第一预设格式的图像的同时观察实际车辆行驶状况。
13、在一种可能的设计中,所述拍摄所述车辆四周的全景实时景象并生成第一预设格式的图像,包括:拍摄所述车辆四周的全景实时景象,得到光学图像;将所述光学图像的光信号转变为电信号;将所述电信号通过模数转换转变为数字图像信号;将所述数字图像信号进行全景拼接,得到第一预设格式的图像。
14、在一种可能的设计中,所述辅助驾驶方法还包括:实时检测所述车辆所在道路上的静态物体和/或动态物体;若检测到所述静态物体和/或动态物体靠近所述车辆的距离小于预设距离,则拍摄所述车辆左侧和/或右侧和/或尾侧的实时景象并生成第二预设格式的图像,显示所述第二预设格式的图像至用户眼睛处,同时开启震动预警。
15、在一种可能的设计中,所述若检测到所述静态物体和/或动态物体靠近所述车辆的距离小于预设距离,则拍摄所述车辆左侧和/或右侧和/或尾侧的实时景象并生成第二预设格式的图像,显示所述第二预设格式的图像至用户眼睛处,同时开启震动预警,包括:若检测到所述静态物体和/或动态物体靠近所述车辆左侧的距离小于预设距离,则拍摄所述车辆左侧的实时景象并生成第二预设格式的图像,显示所述第二预设格式的图像至用户眼睛处,同时开启左侧的震动预警;若检测到所述静态物体和/或动态物体靠近所述车辆右侧的距离小于预设距离,则拍摄所述车辆右侧的实时景象并生成第二预设格式的图像,显示所述第二预设格式的图像至用户眼睛处,同时开启右侧的震动预警;若检测到所述静态物体和/或动态物体靠近所述车辆尾侧的距离小于预设距离,则拍摄所述车辆尾侧的实时景象并生成第二预设格式的图像,显示所述第二预设格式的图像至用户眼睛处,同时开启左侧和右侧的震动预警。
16、在一种可能的设计中,所述辅助驾驶方法还包括:若检测不到uwb信号,则测定所述车辆的gps定位信息和所述ar装置的gps定位信息;若检测到uwb信号,则根据所述uwb信号测定所述ar装置与所述车辆之间的距离,得到所述车辆的uwb定位信息和所述ar装置的uwb定位信息;将所述车辆的uwb定位信息、所述ar装置的uwb定位信息、所述车辆的gps定位信息和所述ar装置的gps定位信息转化为图像并显示所述图像至用户眼睛处,以使用户确定所述车辆的定位。
17、在一种可能的设计中,所述若检测到uwb信号,则根据所述uwb信号测定所述ar装置与所述车辆之间的距离之后,还包括:若所述ar装置与所述车辆之间的距离小于预设阈值,则自动解锁所述车辆。
18、本发明提供的用于辅助驾驶的设备及辅助驾驶方法,通过设置在车辆上的全景影像系统拍摄车辆四周的全景实时景象并生成第一预设格式的图像,将第一预设格式的图像传输至车机,以使车机通过无线通信连接将第一预设格式的图像传输至ar装置,光波导成像光学模组显示第一预设格式的图像至用户眼睛处,使得驾驶员可以在查看第一预设格式的图像的同时观察实际车辆行驶状况,实现了在不转移驾驶员视线的前提下使得驾驶员可以观测车辆前方、侧方和后方的全景影像,同时又可以观察实际车辆行驶状况,极大得提高了行车的安全性。
- 还没有人留言评论。精彩留言会获得点赞!